pytorch 单卡改多卡详细教程
先说明一下背景,目前正在魔改以下这篇论文的代码:
https://github.com/QipengGuo/GraphWriter-DGLgithub.com
由于每次完成实验需要5个小时(baseline),自己的模型需要更久(2倍),非常不利于调参和发现问题,所以开始尝试使用多卡加速。
torch.nn.DataParallel ==> 简称 DP
torch.nn.parallel.DistributedDataParallel ==> 简称DDP
一开始采用dp试图加速,结果因为dgl的实现(每个batch的点都会打包进一个batch,从而不可分割),而torch.nn.DataParallel的实现是把一个batch切分成更小,再加上他的加速性能也不如ddp,所以我开始尝试魔改成ddp。
另外,作者在实现Sampler的时候是继承了torch.utils.data.Sampler这个类的,目的在于agenda数据集的文本长度严重不均衡,如下:
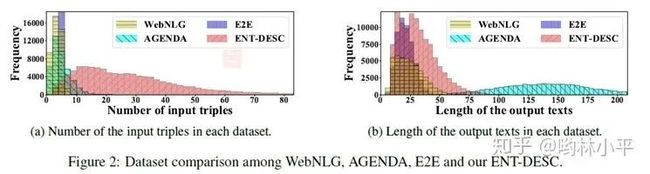
为了让模型更快train完,把长度相近的文本打包成一个batch(温馨提醒,torchtext也有相关的类 bucketiterator[1],大概形式如下:
class BucketSampler(torch.utils.data.Sampler):
def __init__(self, data_source, batch_size=32):
self.data_source = data_source
self.batch_size = batch_size
def __iter__(self):
idxs, lens, batch, middle_batch_size, long_batch_size = basesampler(self.data_source , self.batch_size)
for idx in idxs:
batch.append(idx)
mlen = max([0]+[lens[x] for x in batch])
#if (mlen<100 and len(batch) == 32) or (mlen>100 and mlen<220 and len(batch) >= 24) or (mlen>220 and len(batch)>=8) or len(batch)==32:
if (mlen<100 and len(batch) == self.batch_size) or (mlen>100 and mlen<220 and len(batch) >= middle_batch_size) or (mlen>220 and len(batch)>=long_batch_size) or len(batch)==self.batch_size:
yield batch
batch = []
if len(batch) > 0:
yield batch
def __len__(self):
return (len(self.data_source)+self.batch_size-1)//self.batch_size
这是背景。
写bug第一步:继承DistributedSampler的漏洞百出
我一开始理想当然的把作者的sampler源码crtl-cv下来,唯独只改动了这里:
class DDPBaseBucketSampler(torch.utils.data.distributed.DistributedSampler):
随后就发现了几个问题:
-
dataloader不会发包;
-
dataloader给每个进程发的是完整的数据,按武德来说,应该是1/n的数据,n为你设置的gpu数量;
然后我就开始看起了源码[2],很快啊:
def __iter__(self) -> Iterator[T_co]:
if self.shuffle:
# deterministically shuffle based on epoch and seed
g = torch.Generator()
g.manual_seed(self.seed + self.epoch)
indices = torch.randperm(len(self.dataset), generator=g).tolist() # type: ignore
else:
indices = list(range(len(self.dataset))) # type: ignore
if not self.drop_last:
# add extra samples to make it evenly divisible
padding_size = self.total_size - len(indices)
if padding_size <= len(indices):
indices += indices[:padding_size]
else:
indices += (indices * math.ceil(padding_size / len(indices)))[:padding_size]
else:
# remove tail of data to make it evenly divisible.
indices = indices[:self.total_size]
assert len(indices) == self.total_size
# subsample
indices = indices[self.rank:self.total_size:self.num_replicas] # 这一步保证每个进程拿到的数据不同
assert len(indices) == self.num_samples
return iter(indices)
这里最关键的问题是是什么呢?首先在torch.utils.data.distributed.DistributedSampler里面,数据集的变量叫self.dataset而不是data_source;其次和torch.utils.data.Sampler要求你_重写__iter__函数不同:
def __iter__(self) -> Iterator[T_co]:
raise NotImplementedError
DistributedSampler这个父类里有部分实现,如果你没有考虑到这部分,就自然会出现每个进程拿到的数据都是all的情况。
于是我重写了我的DDPBaseBucketSampler类:
def basesampler(lens, indices, batch_size):
# the magic number comes from the author's code
t1 = []
t2 = []
t3 = []
for i, l in enumerate(lens):
if (l<100):
t1.append(indices[i])
elif (l>100 and l<220):
t2.append(indices[i])
else:
t3.append(indices[i])
datas = [t1,t2,t3]
random.shuffle(datas)
idxs = sum(datas, [])
batch = []
#为了保证不爆卡,我们给不同长度的数据上保护锁
middle_batch_size = min(int(batch_size * 0.75) , 32)
long_batch_size = min(int(batch_size * 0.5) , 24)
return idxs, batch, middle_batch_size, long_batch_size
class DDPBaseBucketSampler(torch.utils.data.distributed.DistributedSampler):
'''
这里要注意和单GPU的sampler类同步
'''
def __init__(self, dataset, num_replicas, rank, shuffle=True, batch_size=32):
super(DDPBaseBucketSampler, self).__init__(dataset, num_replicas, rank, shuffle)
self.batch_size = batch_size
def __iter__(self):
# deterministically shuffle based on epoch
g = torch.Generator()
g.manual_seed(self.epoch)
#print('here is pytorch code and you can delete it in the /home/lzk/anaconda3/lib/python3.7/site-packages/torch/utils/data')
if self.shuffle:
indices = torch.randperm(len(self.dataset), generator=g).tolist()
else:
indices = list(range(len(self.dataset)))
# add extra samples to make it evenly divisible
indices += indices[:(self.total_size - len(indices))]
assert len(indices) == self.total_size
indices = indices[self.rank:self.total_size:self.num_replicas]
assert len(indices) == self.num_samples
# 然后我也要拿到每个数据的长度 (每个rank不同)
lens = torch.Tensor([len(x) for x in self.dataset])
idxs, batch, middle_batch_size, long_batch_size = basesampler(lens[indices], indices, self.batch_size)
for idx in idxs:
batch.append(idx)
mlen = max([0]+[lens[x] for x in batch])
#if (mlen<100 and len(batch) == 32) or (mlen>100 and mlen<220 and len(batch) >= 24) or (mlen>220 and len(batch)>=8) or len(batch)==32:
if (mlen<100 and len(batch) == self.batch_size) or (mlen>100 and mlen<220 and len(batch) >= middle_batch_size) or (mlen>220 and len(batch)>=long_batch_size) or len(batch)==self.batch_size:
yield batch
batch = []
# print('应该出现2次如果是2个进程的话')
if len(batch) > 0:
yield batch
def __len__(self):
return (len(self.dataset)+self.batch_size-1)//self.batch_size
后面每个进程终于可以跑属于自己的数据了(1/n,n=进程数量=GPU数量,单机)
紧接着问题又来了,我发现训练过程正常结束后,主进程无法退出mp.spawn()函数。
写bug第二步,master进程无法正常结束
number workers ddp pytorch下无法正常结束。具体表现为,mp.spawn传递的函数参数可以顺利运行完,但是master进程一直占着卡,不退出。一开始我怀疑是sampler函数的分发batch的机制导致的,什么意思呢?就是由于每个进程拿到的数据不一样,各自进程执行sampler类的时候,由于我规定了长度接近的文本打包在一起,所以可能master进程有一百个iter,slave只有80个,然后我马上试了一下,很快啊:

▲DDPBucketSampler(torch.utils.data.distributed.DistributedSampler)类迭代函数__iter__
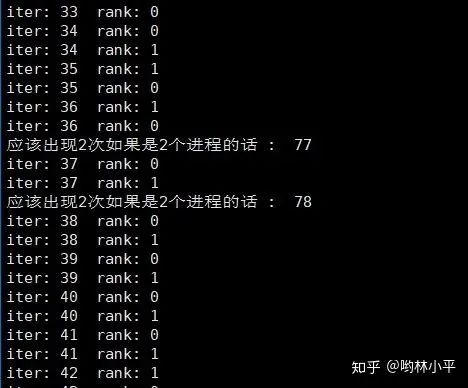
▲都能够正常打印,证明__iter__函数没有问题
发现只有细微的差别,并且,程序最后都越过了这些print,应该不会是batch数量不一致导致的问题。(顺便指的一提的是,sampler在很早的时候就把batch打包好了)
加了摧毁进程,也于事无补
if args.is_ddp:
dist.destroy_process_group()
print('rank destroy_process_group: ' , rank)
然后只能点击强制退出
File "train.py", line 322, in
main(args.gpu, args)
File "/home/lzk/anaconda3/lib/python3.7/site-packages/torch/multiprocessing/spawn.py", line 171, in spawn
while not spawn_context.join():
File "/home/lzk/anaconda3/lib/python3.7/site-packages/torch/multiprocessing/spawn.py", line 77, in join
timeout=timeout,
File "/home/lzk/anaconda3/lib/python3.7/multiprocessing/connection.py", line 920, in wait
ready = selector.select(timeout)
File "/home/lzk/anaconda3/lib/python3.7/selectors.py", line 415, in select
fd_event_list = self._selector.poll(timeout)
TypeError: keyboard_interrupt_handler() takes 1 positional argument but 2 were given
^CError in atexit._run_exitfuncs:
Traceback (most recent call last):
File "/home/lzk/anaconda3/lib/python3.7/multiprocessing/popen_fork.py", line 28, in poll
pid, sts = os.waitpid(self.pid, flag)
TypeError: keyboard_interrupt_handler() takes 1 positional argument but 2 were given
代码参考:基于Python初探Linux下的僵尸进程和孤儿进程(三)[3]、 Multiprocessing in python blocked[4]
很显然是pytorch master进程产生死锁了,变成了僵尸进程。
再探究,发现当我把dataloader的number workers设为0的时候,程序可以正常结束。经过我的注释大法后我发现,哪怕我把for _i , batch in enumerate(dataloader)内的代码全部注释改为pass,程序还是会出现master无法正常结束的情况。所以问题锁定在dataloader身上。参考:nero:PyTorch DataLoader初探[5]
另外一种想法是,mp.spawn出现了问题。使用此方式启动的进程,只会执行和 target 参数或者 run() 方法相关的代码。Windows 平台只能使用此方法,事实上该平台默认使用的也是该启动方式。相比其他两种方式,此方式启动进程的效率最低。参考:Python设置进程启动的3种方式[6]
现在试一下,绕开mp.spawn函数,用shell脚本实现ddp,能不能不报错:
python -m torch.distributed.launch --nproc_per_node=2 --nnodes=1 --node_rank=0 --master_addr="192.168.1.201" --master_port=23456 我的文件.py
参数解释:
-
nnodes:因为是单机多卡,所以设为1,显然node_rank 只能是0了
-
local_rank:进程在运行的时候,会利用args插入local_rank这个参数标识进程序号
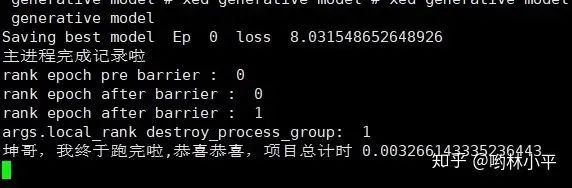
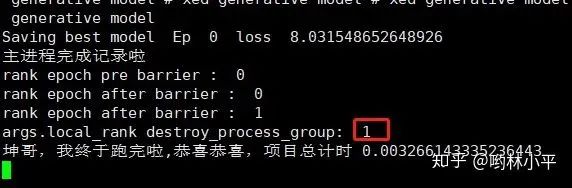
一番改动后,发现问题有所好转,最直观的感受是速度快了非常多!!现在我没有父进程的问题了,但还是在运行完所有的程序后,无法正常结束:
此时我的代码运行到:

上面的代码是main函数,2个进程(master,salve)都可以越过barrier,其中slave顺利结束,但是master却迟迟不见踪影:
这个时候ctrl+c终止,发现:
顺着报错路径去torch/distributed/launch.py, line 239找代码:
def main():
args = parse_args()
# world size in terms of number of processes
dist_world_size = args.nproc_per_node * args.nnodes
# set PyTorch distributed related environmental variables
current_env = os.environ.copy()
current_env["MASTER_ADDR"] = args.master_addr
current_env["MASTER_PORT"] = str(args.master_port)
current_env["WORLD_SIZE"] = str(dist_world_size)
processes = []
if 'OMP_NUM_THREADS' not in os.environ and args.nproc_per_node > 1:
current_env["OMP_NUM_THREADS"] = str(1)
print("*****************************************\n"
"Setting OMP_NUM_THREADS environment variable for each process "
"to be {} in default, to avoid your system being overloaded, "
"please further tune the variable for optimal performance in "
"your application as needed. \n"
"*****************************************".format(current_env["OMP_NUM_THREADS"]))
for local_rank in range(0, args.nproc_per_node):
# each process's rank
dist_rank = args.nproc_per_node * args.node_rank + local_rank
current_env["RANK"] = str(dist_rank)
current_env["LOCAL_RANK"] = str(local_rank)
# spawn the processes
if args.use_env:
cmd = [sys.executable, "-u",
args.training_script] + args.training_script_args
else:
cmd = [sys.executable,
"-u",
args.training_script,
"--local_rank={}".format(local_rank)] + args.training_script_args
process = subprocess.Popen(cmd, env=current_env)
processes.append(process)
for process in processes:
process.wait() # 等待运行结束
if process.returncode != 0:
raise subprocess.CalledProcessError(returncode=process.returncode,
cmd=cmd)
可恶,master和dataloader到底有什么关系哇。。
这个问题终于在昨天(2020/12/22)被解决了,说来也好笑,左手是graphwriter的ddp实现,无法正常退出,右手是minst的ddp最小例程,可以正常退出,于是我开始了删减大法。替换了数据集,model,然后让dataloader空转,都没有发现问题,最后一步步逼近,知道我把自己的代码这一行注释掉以后,终于可以正常结束了:
def main(args):
############################################################
print('local_rank : ' , args.local_rank )
if args.is_ddp:
dist.init_process_group(
backend='nccl',
init_method='env://',
world_size=args.world_size,
rank=args.local_rank
)
############################################################
# torch.multiprocessing.set_sharing_strategy('file_system') 万恶之源
os.environ["CUDA_VISIBLE_DEVICES"] = os.environ["CUDA_VISIBLE_DEVICES"].split(',')[args.local_rank]
args.device = torch.device(0)
...
为什么我当时会加上这句话呢?因为当时在调试number worker的时候(当时年轻,以为越大越好,所以设置成了number workers = cpu.count()),发现系统报错,说超出了打开文件的最大数量限制。在torch.multiprocessing的设定里,共享策略(参考pytorch中文文档[7])默认是File descriptor,此策略将使用文件描述符作为共享内存句柄。当存储被移动到共享内存中,一个由shm_open获得的文件描述符被缓存。当时,文档还提到:
如果你的系统对打开的文件描述符数量有限制,并且无法提高,你应该使用
file_system策略。
所以我换成了torch.multiprocessing.set_sharing_strategy('file_system'),但是却忽略文档里的共享内存泄露警告。显然,或许这不是严重的问题,文档里提到:
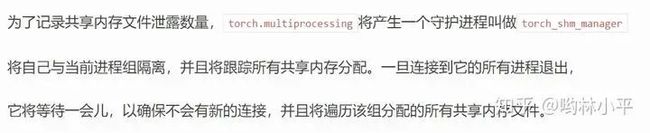
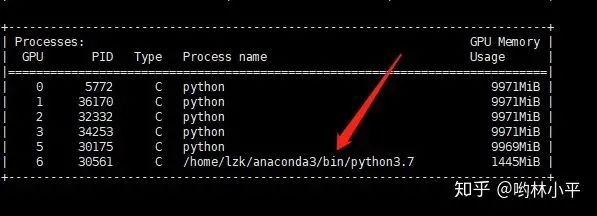
也有可能我所说的master进程就是这个torch_shm_manager,因为destory进程组始终无法结束0号进程:
这个BUG结束了,真开心,期待下一个BUG快快到来。