3D-2D三维重建:PnP
简介
PnP(Perspective-n-Point)描述了当我们已知n个世界坐标系下的3D空间点以及它们的2D归一化相机坐标系下的坐标时,如何估计相机位姿的方法。通常最少需要4对3D-2D点对(其中之一用于验证结果),就可以解出PnP问题。尤其是在双目或RGB-D的视觉里程计中,点的空间坐标可以由 s K − 1 x sK^{-1}x sK−1x直接求出, s s s为像素点的深度值,即可直接使用PnP估计相机运动。
PnP问题解法有很多,线性方法有直接线性变换法、P3P、EPnP、UPnP等,还可以采用非线性优化的方法、构建最小二乘问题迭代求解,最常用的是BA调整(Bundle Adjustment)。OpenCV中对上述多数方法都进行了集成,详情可见:solvePnP()。
PnP只是求解相机位姿的方法,求解出来的位姿均是相机相对世界坐标系的变换关系 T w c T_{wc} Twc。对于那些没有3D匹配点的2D-2D匹配点对,估计其对应的3D点仍需采用三角化方式。
原理
直接线性变换法
直接线性变换法依据相机投影的基本原理,通过线性变换求解目标值。即 s x = P X sx=PX sx=PX其中, x = ( u , v , 1 ) T x=(u,v,1)^T x=(u,v,1)T为像素点的归一化坐标; P = [ R ∣ T ] P=[R|T] P=[R∣T]为 3 × 4 3\times4 3×4的相机投影矩阵。
在求解PnP问题时,旋转矩阵 R R R和平移矩阵 T T T是待求的变量,由于 P P P一共有12维,而每对点对能提供2个约束,因此最少需要6对点对,才能实现PnP问题的线性求解。
需要注意的一点是,上述公式默认相机内参数矩阵 K K K已知,所以 x x x采用的是归一化平面坐标,在求解PnP问题时去掉了 K K K的影响,对应的solvePnP()中的3D点为相机坐标系下的齐次坐标;如果 K K K未知,也可以使用PnP估计 K K K, R R R, T T T,只不过上述推导过程多了内参 K K K、求解时未知量增多,效果差一些而已,对应的solvePnP()中的3D点为世界坐标系下的坐标。
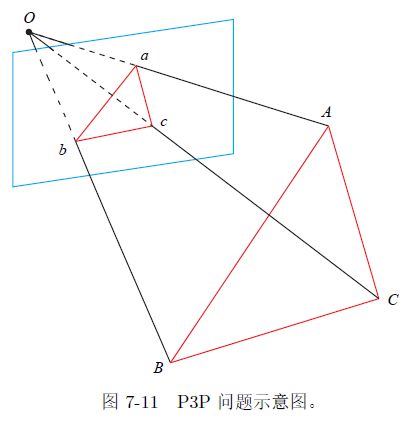
P3P
P3P也是一种求解PnP问题的方法,不过只使用3对点对即可,基本原理是根据世界坐标系下的3D点和像素坐标系下2D点,得到对应的相机坐标系的3D点,将问题转化成3D-3D问题,通过迭代最近点(Iterative Closest Point, ICP)方法进行求解。P3P方法只是根据上述3D-2D点对得到相机坐标系下的3D坐标,而进一步估计相机位姿 R R R和 T T T的过程仍需借助ICP方法完成。
BA优化
上述线性方法总是先求相机位姿 P P P,再求空间点坐标,而非线性优化则将相机位姿和空间点坐标作为变量,同时进行优化。
上述方法的原理推导过程,请参考《视觉SLAM14讲-chapter7.7:3D-2D:PnP》,这里不再赘述。
备注:ICP问题
迭代最近点(Iterative Closest Point, ICP)方法用于解决已知3D-3D点对情况下,求解点的空间坐标的问题。在这个过程中,只涉及由世界坐标系到相机坐标系的转换,而与相机模型无关。3D点对满足的关系如下: P 2 = R P 1 + T P_2=RP_1+T P2=RP1+T其中, P 1 P_1 P1是相机坐标系下的坐标; P 2 P_2 P2是世界坐标系下的坐标。
可以通过SVD分解或非线性优化的方式求解ICP问题。
代码
以下代码使用OpenCV提供的EPNP方法求接PnP问题,同时使用RGBD相机的深度图计算3D点位置。
#include detector = FeatureDetector::create ( "ORB" );
// Ptr descriptor = DescriptorExtractor::create ( "ORB" );
Ptr<DescriptorMatcher> matcher = DescriptorMatcher::create ( "BruteForce-Hamming" );
//-- 第一步:检测 Oriented FAST 角点位置
detector->detect ( img_1,keypoints_1 );
detector->detect ( img_2,keypoints_2 );
//-- 第二步:根据角点位置计算 BRIEF 描述子
descriptor->compute ( img_1, keypoints_1, descriptors_1 );
descriptor->compute ( img_2, keypoints_2, descriptors_2 );
//-- 第三步:对两幅图像中的BRIEF描述子进行匹配,使用 Hamming 距离
vector<DMatch> match;
// BFMatcher matcher ( NORM_HAMMING );
matcher->match ( descriptors_1, descriptors_2, match );
//-- 第四步:匹配点对筛选
double min_dist=10000, max_dist=0;
//找出所有匹配之间的最小距离和最大距离, 即是最相似的和最不相似的两组点之间的距离
for ( int i = 0; i < descriptors_1.rows; i++ )
{
double dist = match[i].distance;
if ( dist < min_dist ) min_dist = dist;
if ( dist > max_dist ) max_dist = dist;
}
printf ( "-- Max dist : %f \n", max_dist );
printf ( "-- Min dist : %f \n", min_dist );
//当描述子之间的距离大于两倍的最小距离时,即认为匹配有误.但有时候最小距离会非常小,设置一个经验值30作为下限.
for ( int i = 0; i < descriptors_1.rows; i++ )
{
if ( match[i].distance <= max ( 2*min_dist, 30.0 ) )
{
matches.push_back ( match[i] );
}
}
}
// 归一化,将像素坐标转换到相机坐标(非齐次坐标)
Point2d pixel2cam(const Point2d& p, const Mat& K)
{
/* // 等价
Mat x = (Mat_(3, 1) << p.x, p.y, 1);
x = K.inv()*x;
return Point2d(
x.at(0,0),x.at(1,0)
);
*/
return Point2d(
(p.x - K.at<double>(0, 2)) / K.at<double>(0, 0), // 像素坐标系->图像坐标系->相机坐标系
(p.y - K.at<double>(1, 2)) / K.at<double>(1, 1)
);
}