RL 笔记(2) 从Pollicy Gradient、DDPG到 A3C
RL 笔记(2) 从Pollicy Gradient、DDPG到 A3C
Pollicy Gradient
Policy Gradient不通过误差反向传播,它通过观测信息选出一个行为直接进行反向传播。 通过更新 Policy Network 来直接更新策略的。实际上就是一个神经网络,输入是状态,输出直接就是动作(不是Q值)。而是利用reward奖励直接对选择行为的可能性进行增强和减弱,好的行为会被增加下一次被选中的概率,不好的行为会被减弱下次被选中的概率。一般输出有两种方式:一种是概率的方式,即输出某一个动作的概率;另一种是确定性的方式,即输出具体的某一个动作举例如下图所示:输入当前的状态,输出action的概率分布,选择概率最大的一个action作为要执行的操作

如果要更新 Policy Network 策略网络,或者说要使用梯度下降的方法来更新网络,需要有一个目标函数,对于所有强化学习的任务来说,其实目标都是使所有带衰减 reward 的累加期望最大。
L ( θ ) = E ( r 1 + γ r 2 + γ 2 r 3 + … ∣ π ( , θ ) ) L(θ)=E(r_1+γr_2+γ^2r_3+…|π(,θ)) L(θ)=E(r1+γr2+γ2r3+…∣π(,θ))
这个损失函数和 Policy Network 策略网络简直没有什么直接联系,reward是环境给出的,跟参数 θ 没有直接运算上的关系。那么该如何能够计算出损失函数关于参数的梯度 ∇θL(θ)?
现在有一个 Policy Network 策略网络,输入状态,输出动作的概率。然后执行完动作之后,我们可以得到reward,或者result。那么这个时候,自然有个非常简单的想法:如果某一个动作得到reward多,那么就使其出现的概率增大,如果某一个动作得到的reward少,那么我们就使其出现的概率减小。
当然,用 reward 来评判动作的好坏是不准确的,甚至用 result 来评判也是不准确的(因为无论是 reward,还是result 都依赖于一连串的动作来达成,不能只将功劳或过错归于当前的动作上。但是这样给了一个新的思路:如果能够构造一个好的动作评判指标,来判断一个动作的好与坏,那么我们就可以通过改变动作的出现概率来优化策略!
假设这个评价指标是 f(s,a), 我们的 Policy Network 输出的 π(a|s,θ)是概率, 那么可以通过极大似然估计的方法来优化这个目标。比如说我们可以构造如下目标函数
L ( θ ) = ∑ l o g π ( a ∣ s , θ ) f ( s , a ) L(θ)=∑logπ(a|s,θ)f(s,a) L(θ)=∑logπ(a∣s,θ)f(s,a)
比如说,对于某局游戏,假如最终赢了,那么认为这局游戏中每一步都是好的,如果输了,那么认为都是不好的。好的 f(s,a) 就是1,不好的就是-1,然后极大化上面的目标函数即可。
那么问题就是 f(s,a) 值是对动作好坏最好的评价吗?
显然不是。最理想的状态是对于好的动作 f(s,a) 值为正,对于不好的动作 f(s,a) 值为负。而我们一般 f(s,a) 值并没办法完全达到这种理想状态,会有偏差。实际上,这是Policy Gradient最大的问题,我们很难确定一个最合理的评价指标,也因此,Policy Gradient的 f(s,a) 可以有各种形式:

论文[1]中指出可以使用reward,使用Q,使用A,使用TD来作为动作的评价指标。
那么这些方法中有什么差别呢?归根到底就是variance和bias的问题。
用reward来作为动作的评价是最直接的,采用上图第3种做法reward-baseline是很常见的一种做法。这样做bias比较低,但是variance很大,也就是reward值太不稳定,会导致训练不会。
那么采用Q值会怎样呢?Q值是对reward的期望值,使用Q值variance比较小,bias比较大。一般我们会选择使用A,Advantage。A=Q-V,是一个动作相对当前状态的价值。本质上V可以看做是baseline。对于上图第3种做法,也可以直接用V来作为baseline。但是还是一样的问题,A的variance比较大。为了平衡variance和bias的问题,使用TD会是比较好的做法,既兼顾了实际值reward,又使用了估计值V。在TD中,TD(lambda)平衡不同长度的TD值,会是比较好的做法。也因此,在[1]中提出的general advantage estimation中:
A = T D ( λ ) − V A=TD(\lambda) -V A=TD(λ)−V
那么在实际使用中,需要根据具体的问题选择不同的方法。有的问题reward很容易得到,有的问题reward非常稀疏。reward越稀疏,也就越需要采用估计值。
以上就是Policy Gradient的核心做法。那么要说明的一点是Policy Gradient能够处理不可微的问题。以AlphaGo为例,AlphaGo的policy network输出的是softmax概率,我们只能从中选择一个下法,然后得到一个reward。这种情况下reward和policy network之间是不可微的关系,而使用Policy Gradient则没有这个障碍。也因为Policy Gradient的这个特点,目前的很多传统监督学习的问题因为输出都是softmax的离散形式,都可以改造成Policy Gradient的方法来实现,调节得当效果会在监督学习的基础上进一步提升。
Actor Critic
Actor-Critic 的 Actor 的前生是 Policy Gradients, 这能让它毫不费力地在连续动作中选取合适的动作, 而 Q-learning 做这件事会瘫痪. 那为什么不直接用 Policy Gradients 呢? 原来 Actor Critic 中的 Critic 的前生是 Q-learning 或者其他的 以值为基础的学习法 , 能进行单步更新, 而传统的 Policy Gradients 则是回合更新, 也就是要到一轮结束后才能进行更新。如某盘游戏,假如最后的结果是胜利了,那么可以认为其中的每一步都是好的,反之则认为其中的每一步都是不好的,这降低了学习效率。
要采用单步更新,意味着我们需要为每一步都即时做出评估。Actor-Critic 中的 Critic 负责的就是评估这部分工作,而 Actor 则是负责选择出要执行的动作。这就是 Actor-Critic 的思想。从Actor Critic的命名我们也可以更好的理解Policy Gradient。Actor就是policy network,用来输出动作,而Critic对应value network,就是评价动作用的,通过Critic来引导Actor的更新。从上面论文中提出的各种评价指标可知,看到 Critic 的输出有多种形式,可以采用 Q值、V值 或 TD 等。
因此 Actor-Critic 的思想就是从 Critic 评判模块(采用深度神经网络居多)得到对动作的好坏评价,然后反馈给 Actor(采用深度神经网络居多) 让 Actor 更新自己的策略。从具体的训练细节来说,Actor 和 Critic 分别采用不同的目标函数进行更新, 如可参考这里的代码 Actor-Critic (Tensorflow),下面要说的 DDPG 也是这么做的。

Deterministic Policy Gradient
还有一类应用神经网络的输出是连续的量,比如机器人控制。那么对于连续控制的问题,我们就无法直接使用policy gradient了,因为aciton不是概率,而是一个具体的向量。这个时候可以使用Deterministic Policy Gradient[2]来实现,基本的思想就是Policy Network的目标就是最大化Q值:
l o s s = − Q loss = -Q loss=−Q
就是这么简单。简单之中,这个想法却非常直接。因为我们希望Policy Network越来越好,目标就是希望reward最大化,而reward最大化将会带来Q值最大化。因此,我们让Policy Network的训练目标就是最大化Q值非常合理。那么Q值的计算显然我们还需要构造一个Q Network来实现。这样整个网络就是完全可微的。也就是说Actor是a=A(s),其中A是Actor网络,s是输入状态,a是输出,Critic是Q=C(s,a),其中C是Critic网络。那么Actor网络的损失函数loss=-Q=-C(s,a)。所以我们可以发现,Actor网络使用Critic网络作为损失函数。
DDPG
DDPG 相对于 DPG 的核心改进是引入了 Deep Learning,采用深度神经网络作为 DPG 中的策略函数 μμ 和 QQ 函数的模拟,即 Actor 网络和 Critic 网络;然后使用深度学习的方法来训练上述神经网络。两者的关系类似于 DQN 和 Q-learning 的关系。
DDPG 的网络结构为 Actor 网络 + Critic 网络,对于状态 s, 先通过 Actor 网络获取 action a, 这里的 a 是一个向量;然后将 a 输入 Critic 网络,输出的是 Q 值,目标函数就是极大化 Q 值,但是更新的方法两者又有一些区别。论文中显示 DDPG 算法流程如下
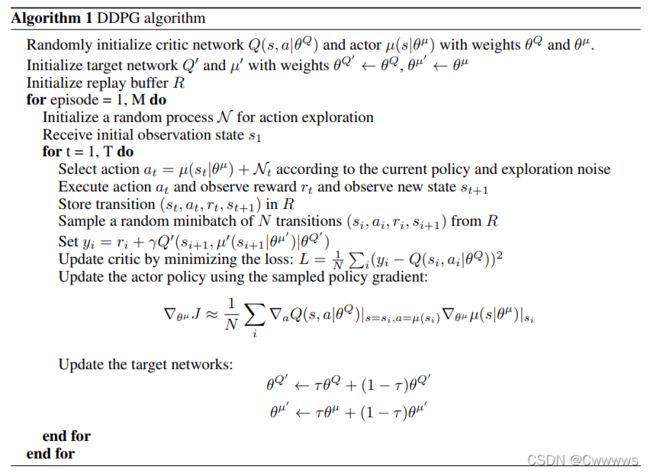
从算法的流程可知,Actor 网络和 Critic 网络是分开训练的,但是两者的输入输出存在联系,Actor 网络输出的 action 是 Critic 网络的输入,同时 Critic 网络的输出会被用到 Actor 网路进行反向传播。
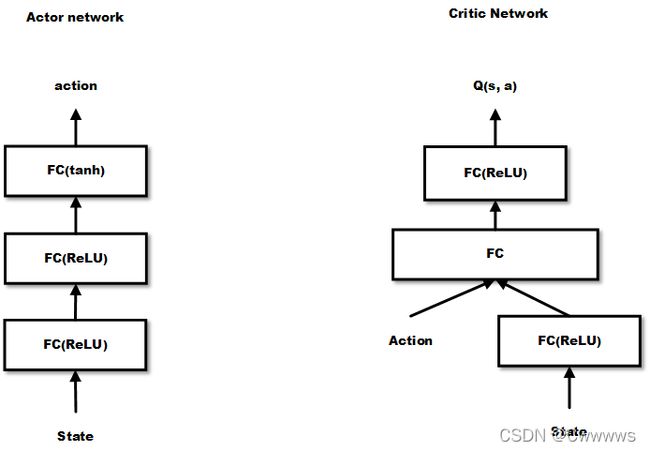
算法中actor和critic均用DNN表示,分为称为actor network和critic network。它们分别是deterministic policy μ \mu μ和value-action function Q Q Q的函数近似,参数分别为 θ Q \theta^{Q} θQ 和 θ μ \theta^{\mu} θμ 。在维度比较低时,有下面的结构:
在迭代更新过程中,先积累experience replay buffer直到达到minibatch指定个数,然后根据sample分别更新两个DNN。先更新critic,通过loss函数 L L L 更新参数 θ Q \theta^{Q} θQ 。然后,通过critic得到 Q Q Q 函数相对于动作 a a a 的梯度,因为在actor的更新公式(也就是DPG定理)中会用到,然后应用actor更新公式更新参数。刚才得到的 θ μ \theta^{\mu} θμ和 θ Q \theta^{Q} θQ ,对于 θ \theta θ的更新,会按比例(通过参数 τ \tau τ)更新到target network。这个target network会在下一步的训练中用于predict策略和 Q Q Q 函数值。
A3C
在提出 DDPG 后,DeepMind 在这个基础上提出了效果更好的 Asynchronous Advantage Actor-Critic(A3C)[3]。
传统经验认为,online的RL算法在和DNN简单结合后会不稳定。主要原因是观察数据往往波动很大且前后sample相互关联。像Neural fitted Q iteration和TRPO方法通过将经验数据batch,或者像DQN中通过experience replay memory对之随机采样,这些方法有效解决了前面所说的两个问题,但是也将算法限定在了off-policy方法中。本文提出了另一种思路,即通过创建多个agent,在多个环境实例中并行且异步的执行和学习。于是,通过这种方式,在DNN下,解锁了一大批online/offline的RL算法(如Sarsa, AC, Q-learning)。它还有个潜在的好处是不那么依赖于GPU或大型分布式系统。A3C可以跑在一个多核CPU上。总得来说,这篇论文更多是工程上的设计和优化。另外,将value function的估计作为baseline可以使得PG方法有更低的variance。
这篇文章将one-step Sarsa, one-step Q-learning, n-step Q-learning和advantage AC扩展至多线程异步架构。注意这几种方法特点迥异,AC是on-policy的policy搜索方法,而Q-learning是off-policy value-based方法。这也体现了该框架的通用性。简单地说,每个线程都有agent运行在环境的拷贝中,每一步生成一个参数的梯度,多个线程的这些梯度累加起来,一定步数后一起更新共享参数。
它有几个显著优点:
1)它运行在单个机器的多个CPU线程上,而非使用parameter server的分布式系统,这样就可以避免通信开销和利用lock-free的高效数据同步方法(Hogwild!方法)。
2)多个并行的actor可以有助于exploration。在不同线程上使用不同的探索策略,使得经验数据在时间上的相关性很小。这样不需要DQN中的experience replay也可以起到稳定学习过程的作用,意味着学习过程可以是on-policy的。其它好处包括更少的训练时间,另外因为不需要experience replay所以可以使用on-policy方法(如Sarsa),且能保证稳定。
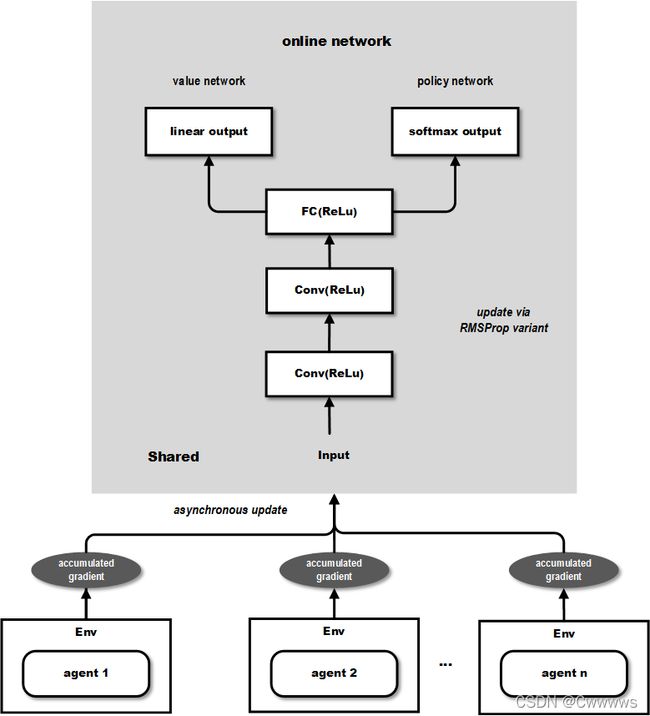
A3C 算法和DDPG类似,通过 DNN 拟合 policy function 和 value function的估计。但是不同点在于:
- A3C 中有多个 agent 对网络进行 asynchronous update,这样带来了样本间的相关性较低的好处,因此 A3C 中也没有采用 Experience Replay 的机制;这样 A3C 便支持 online 的训练模式了;
- A3C 有两个输出,其中一个 softmax output 作为 policy π ( a t ∣ s t ; θ ) \ \ π(a_t|s_t;θ) π(at∣st;θ),而另一个linear output为 value function V ( s t ; θ v ) V(s_t;θ_v) V(st;θv)
- A3C 中的Policy network 的评估指标采用的是上面比较了多种评估指标的论文中提到的 Advantage Function(即A值) 而不是 DDPG 中单纯的 Q 值。
参考
- 莫烦python
- DRL之Policy Gradient, Deterministic Policy Gradient与Actor Critic
- 深度增强学习(DRL)漫谈 - 从AC(Actor-Critic)到A3C(Asynchronous Advantage Actor-Critic)
- 深度解读:Policy Gradient,PPO及PPG
参考论文:
[1] Schulman, John, et al. “High-dimensional continuous control using generalized advantage estimation.” arXiv preprint arXiv:1506.02438 (2015).
[2] Lillicrap, Timothy P., et al. “Continuous control with deep reinforcement learning.” arXiv preprint arXiv:1509.02971 (2015).
[3] Mnih, Volodymyr, et al. “Asynchronous methods for deep reinforcement learning.” International Conference on Machine Learning. 2016.
P., et al. “Continuous control with deep reinforcement learning.” arXiv preprint arXiv:1509.02971 (2015).
[3] Mnih, Volodymyr, et al. “Asynchronous methods for deep reinforcement learning.” International Conference on Machine Learning. 2016.