自动驾驶环境感知——视觉传感器技术
文章目录
- 1. 摄像头的成像原理
-
- 1.1 单目视觉传感器的硬件结构
- 1.2 单目视觉的成像原理 –小孔成像模型
- 1.3 单目视觉的成像原理 – 像素坐标系
- 1.4 单目视觉三维坐标系转换 – 外参
- 1.5 单目视觉的坐标系转换 – 从世界坐标点到像素坐标
- 1.6 单目视觉的特性
- 2. 视觉传感器的标定
-
- 2.1 视觉传感器标定原理 – 线性标定法
- 2.2 相机畸变模型
-
- 2.2.1 径向畸变
- 2.2.2 切向畸变
- 2.3 单目相机标定方法
- 2.4 双目相机标定
-
- 2.4.1 双目相机模型
- 2.4.2 双目相机标定方法
- 2.5 俯视图转化标定——逆透视变换
1. 摄像头的成像原理
视觉传感器:利用光学元件和成像装置获取外部环境图像信息的仪器。
通常视觉传感器,其主要功能是获取足够的机器视觉系统要处理的最原始图像,类似于人类的眼睛。

1.1 单目视觉传感器的硬件结构
单目视觉的相机模组的组件包括了lens(镜头)、分色滤色片(IR cut)、感光元件等。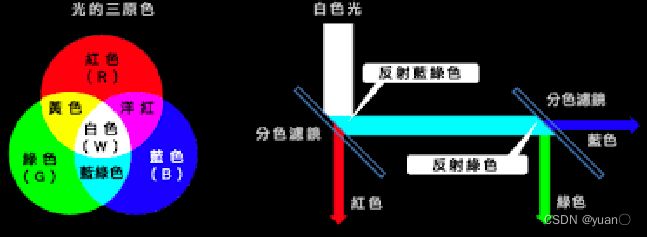 分色滤色片:对色光具有吸收、反射和透过作用的染有颜色的透明片。目前分色滤色片有两种分色方法:RGB原色分色法,CMYK补色分色法
分色滤色片:对色光具有吸收、反射和透过作用的染有颜色的透明片。目前分色滤色片有两种分色方法:RGB原色分色法,CMYK补色分色法
 感光元件,其表面包含有几十万到几百万的光电二极管。光电二极管受到光照射时,就会产生电荷。感光元件一般包括CCD和CMOS两种。像素值一般为(0-255),电路噪声导致像素值失真.
感光元件,其表面包含有几十万到几百万的光电二极管。光电二极管受到光照射时,就会产生电荷。感光元件一般包括CCD和CMOS两种。像素值一般为(0-255),电路噪声导致像素值失真.
1.2 单目视觉的成像原理 –小孔成像模型
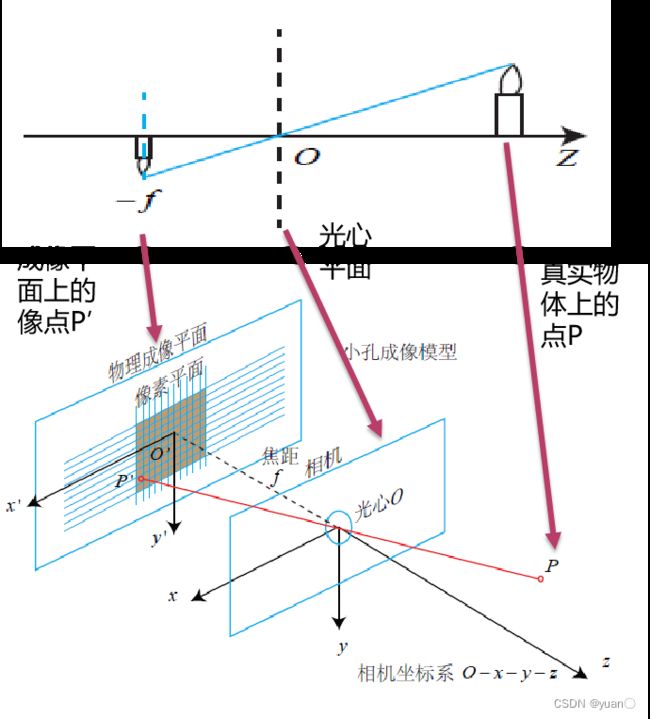
成像模型:相机将三维世界中的坐标点(单位为米)映射到二维图像平面(单位为像素)的过程。
相机坐标系: O − x − y − z O−x−y−z O−x−y−z 为相机坐标系,在轴指向相机前方, x x x轴向右, y y y轴向下。 O O O为摄像机的光心(或摄像头中心)。
物理成像平面: O ’ − x ’ − y ’ − z ’ O’−x’−y’−z’ O’−x’−y’−z’为物理成像平面。物理成像平面到小孔的距离为 f f f,称之为焦距。
成像原理:空间点 P P P的光束被映射到图像平面,图像平面感光之后形成像素 P ′ P' P′。
接下来看看具体的原理推导:
首先,已知三维世界中的坐标点 P = ( X , Y , Z ) P=(X,Y,Z) P=(X,Y,Z),成像平面中的 P ′ = ( X ′ , Y ′ ) P'=(X',Y') P′=(X′,Y′),焦距为 f f f.由相似三角形原理可得, X ′ = − f ⋅ X Z Y ′ = − f ⋅ Y Z \begin{array}{c}X' = - \frac{{f \cdot X}}{Z}\\\\Y' = - \frac{{f \cdot Y}}{Z}\end{array} X′=−Zf⋅XY′=−Zf⋅Y 在视觉感知中,常使用等效表达的方式来体现真实图像的输出过程 因此,我们可以将式子改为 X ′ = f ⋅ X Z Y ′ = f ⋅ Y Z \begin{array}{c}X' = \frac{{f \cdot X}}{Z}\\\\Y' = \frac{{f \cdot Y}}{Z}\end{array} X′=Zf⋅XY′=Zf⋅Y
因此,我们可以将式子改为 X ′ = f ⋅ X Z Y ′ = f ⋅ Y Z \begin{array}{c}X' = \frac{{f \cdot X}}{Z}\\\\Y' = \frac{{f \cdot Y}}{Z}\end{array} X′=Zf⋅XY′=Zf⋅Y
1.3 单目视觉的成像原理 – 像素坐标系
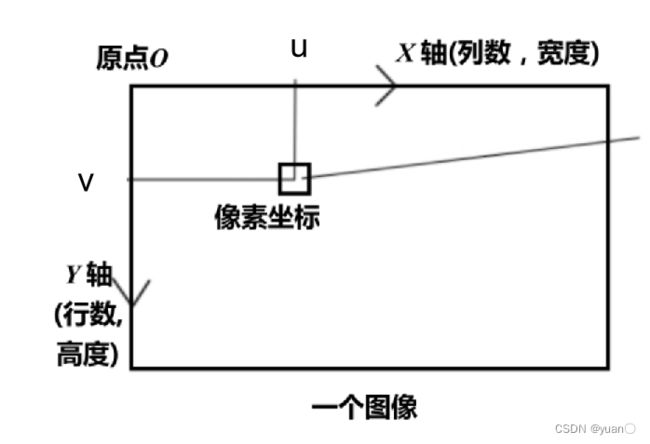
从成像平面坐标到像素坐标:图像是基于像素来表达。像素坐标和成像平面坐标之间,相差了一个缩放和原点的平移。
假设正向成像平面中 P ’ = ( X ’ , Y ’ ) P’=(X’, Y’) P’=(X’,Y’), 其像素坐标为 ( u , v ) (u, v) (u,v).
缩放及平移的过程可以由下式来表达: { u = α X ′ + c x v = β Y ′ + c y \left\{ {\begin{array}{ccccccccccccccc}{u = \alpha X' + {c_x}}\\{v = \beta Y' + {c_y}}\end{array}} \right. {u=αX′+cxv=βY′+cy 将 P ′ P' P′的坐标代入, X ′ = f ⋅ X Z , Y ′ = f ⋅ Y Z \begin{array}{c}X' = \frac{{f \cdot X}}{Z},Y' = \frac{{f \cdot Y}}{Z}\end{array} X′=Zf⋅X,Y′=Zf⋅Y,可以得到三维坐标与像素坐标的转换关系 { u = f x X Z + c x v = f y Y Z + c y f x = α f , f y = β f \begin{array}{l}\left\{ {\begin{array}{ccccccccccccccc}{u = {f_x}\frac{X}{Z} + {c_x}}\\{v = {f_y}\frac{Y}{Z} + {c_y}}\end{array}} \right.\\{f_x} = \alpha f,{f_y} = \beta f\end{array} {u=fxZX+cxv=fyZY+cyfx=αf,fy=βf 用矩阵的形式表达: [ μ ν 1 ] = 1 Z [ f x 0 c x 0 f y c y 0 0 1 ] [ X Y Z ] \left[ {\begin{array}{ccccccccccccccc}\mu \\\nu \\1\end{array}} \right] = \frac{1}{Z}\left[ {\begin{array}{ccccccccccccccc}{{f_x}}&0&{{c_x}}\\0&{{f_y}}&{{c_y}}\\0&0&1\end{array}} \right]\left[ {\begin{array}{ccccccccccccccc}X\\Y\\Z\end{array}} \right] μν1 =Z1 fx000fy0cxcy1 XYZ 其中, [ μ ν 1 ] \left[ {\begin{array}{ccccccccccccccc}\mu \\\nu \\1\end{array}} \right] μν1 为像素坐标, [ X Y Z ] \left[ {\begin{array}{ccccccccccccccc}X\\Y\\Z\end{array}} \right] XYZ 为相机坐标系中的三维坐标点, [ f x 0 c x 0 f y c y 0 0 1 ] \left[ {\begin{array}{ccccccccccccccc}{{f_x}}&0&{{c_x}}\\0&{{f_y}}&{{c_y}}\\0&0&1\end{array}} \right] fx000fy0cxcy1 为内参矩阵。
1.4 单目视觉三维坐标系转换 – 外参
相机的三维坐标系( O C O_C OC) 并不是一个“稳定”的坐标系,会随着相机的移动而改变坐标的原点和各个坐标轴的方向。在应用中,相机安装在自动驾驶车辆上,随车辆运动相机坐标系实时变化。对一些需要固定特征坐标的应用,比如地图,因此需要引进一个稳定不变的坐标系:世界坐标系( O W O_W OW)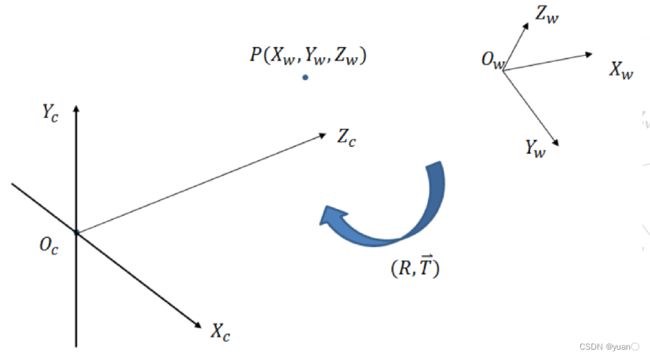 从某三维世界坐标系( O W O_W OW)到相机的三维坐标系( O C O_C OC)的变换,称为相机的外参,本质是将世界坐标系中的特征点,转换到相机坐标系。
从某三维世界坐标系( O W O_W OW)到相机的三维坐标系( O C O_C OC)的变换,称为相机的外参,本质是将世界坐标系中的特征点,转换到相机坐标系。
三维坐标系的变换是一个刚性平移加旋转的过程,变换包括平移向量( t t t:3x1)以及旋转矩阵( R R R:3x3)。
三维坐标变换表达:已知某世界坐标系( O W O_W OW)中空间点 P W = ( X W , Y W , Z W ) P_W =(X_W, Y_W, Z_W) PW=(XW,YW,ZW)以及 O W O_W OW与相机坐标系( O C O_C OC)的变换 R , t R,t R,t. 求解此空间点在OC坐标系的坐标 P C = ( X C , Y C , Z C ) P_C =(X_C, Y_C, Z_C) PC=(XC,YC,ZC) 。
下式即为三维坐标变换: [ X c Y c Z c ] = [ R 11 R 12 R 13 R 21 R 22 R 23 R 31 R 32 R 33 ] [ X w Y w Z w ] + [ t 1 t 2 t 3 ] \left[ {\begin{array}{ccccccccccccccc}{{X_c}}\\{{Y_c}}\\{{Z_c}}\end{array}} \right] = \left[ {\begin{array}{ccccccccccccccc}{{R_{11}}}&{{R_{12}}}&{{R_{13}}}\\{{R_{21}}}&{{R_{22}}}&{{R_{23}}}\\{{R_{31}}}&{{R_{32}}}&{{R_{33}}}\end{array}} \right]\left[ {\begin{array}{ccccccccccccccc}{{X_w}}\\{{Y_w}}\\{{Z_w}}\end{array}} \right] + \left[ {\begin{array}{ccccccccccccccc}{{t_1}}\\{{t_2}}\\{{t_3}}\end{array}} \right] XcYcZc = R11R21R31R12R22R32R13R23R33 XwYwZw + t1t2t3
1.5 单目视觉的坐标系转换 – 从世界坐标点到像素坐标
最后对整个过程进行总结:
世界坐标系( O W O_W OW)中空间点 P W = ( X W , Y W , Z W ) P_W =(X_W, Y_W, Z_W) PW=(XW,YW,ZW),成像到相机中得出其像点 p = ( u , v ) p=(u,v) p=(u,v),需要经过三次变换:
- 世界坐标系转换到相机三维坐标系→ 刚性变化,平移加旋转
- 相机三维坐标系转换到相机成像平面坐标系 → 小孔成像模型
- 相机成像坐标系转换到像素坐标系 →缩放加平移

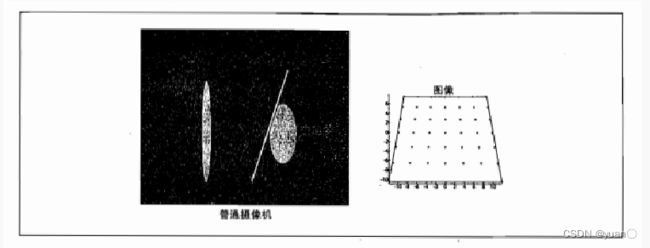
1.6 单目视觉的特性

- 深度不确定:图中点X以及点X’的成像点是同一个像素点x。
- 远小近大:高度为X的物体,离相机越远成像点越矮,远处看不见。
- 易受遮挡:X与X’同时存在时,只能看到X,有盲区
- 受光线强度影响:光线过强,都是255,光线过暗,都是0
- 受分辨率影响:像素过低,细节就会丢失
- 受帧率影响:像素过高,传输速率有限,图片帧率偏低
- 受镜头影响:焦距和视角会直接决定看见的距离和角度范围
2. 视觉传感器的标定
首先对成像公式进行整理:

[ μ ν 1 ] = 1 Z C [ f x 0 c x 0 f y c y 0 0 1 ] [ X C Y C Z C ] = 1 Z C ⋅ K ⋅ [ X C Y C Z C ] = [ μ ν 1 ] = 1 Z C [ f x 0 c x 0 f y c y 0 0 1 ] [ X C Y C Z C ] = 1 Z C ⋅ K ⋅ ( R ⋅ [ X W Y W Z W ] + t ) = 1 Z C ⋅ K ⋅ ( [ R t 0 1 ] [ X W Y W Z W 1 ] ) = M ⋅ [ X W Y W Z W 1 ] = [ M 1 M 2 M 3 M 4 M 5 M 6 M 7 M 8 M 9 M 10 M 11 M 12 ] ⋅ [ X W Y W Z W 1 ] \begin{array}{c}\left[ {\begin{array}{ccccccccccccccc}\mu \\\nu \\1\end{array}} \right] = \frac{1}{{{Z_C}}}\left[ {\begin{array}{ccccccccccccccc}{{f_x}}&0&{{c_x}}\\0&{{f_y}}&{{c_y}}\\0&0&1\end{array}} \right]\left[ {\begin{array}{ccccccccccccccc}{{X_C}}\\{{Y_C}}\\{{Z_C}}\end{array}} \right]\\ = \frac{1}{{{Z_C}}} \cdot K \cdot \left[ {\begin{array}{ccccccccccccccc}{{X_C}}\\{{Y_C}}\\{{Z_C}}\end{array}} \right]\\ = \left[ {\begin{array}{ccccccccccccccc}\mu \\\nu \\1\end{array}} \right] = \frac{1}{{{Z_C}}}\left[ {\begin{array}{ccccccccccccccc}{{f_x}}&0&{{c_x}}\\0&{{f_y}}&{{c_y}}\\0&0&1\end{array}} \right]\left[ {\begin{array}{ccccccccccccccc}{{X_C}}\\{{Y_C}}\\{{Z_C}}\end{array}} \right]\\ = \frac{1}{{{Z_C}}} \cdot K \cdot \left( {R \cdot \left[ {\begin{array}{ccccccccccccccc}{{X_W}}\\{{Y_W}}\\{{Z_W}}\end{array}} \right] + t} \right)\\ = \frac{1}{{{Z_C}}} \cdot K \cdot \left( {\left[ {\begin{array}{ccccccccccccccc}R&t\\0&1\end{array}} \right]\left[ {\begin{array}{ccccccccccccccc}{{X_W}}\\{{Y_W}}\\{{Z_W}}\\1\end{array}} \right]} \right)\\ = M \cdot \left[ {\begin{array}{ccccccccccccccc}{{X_W}}\\{{Y_W}}\\{{Z_W}}\\1\end{array}} \right]\\ = \left[ \begin{array}{l}\begin{array}{ccccccccccccccc}{{M_1}}&{{M_2}}&{{M_3}}&{{M_4}}\end{array}\\\begin{array}{ccccccccccccccc}{{M_5}}&{{M_6}}&{{M_7}}&{{M_8}}\end{array}\\\begin{array}{ccccccccccccccc}{{M_9}}&{{M_{10}}}&{{M_{11}}}&{{M_{12}}}\end{array}\end{array} \right] \cdot \left[ {\begin{array}{ccccccccccccccc}{{X_W}}\\{{Y_W}}\\{{Z_W}}\\1\end{array}} \right]\end{array} μν1 =ZC1 fx000fy0cxcy1 XCYCZC =ZC1⋅K⋅ XCYCZC = μν1 =ZC1 fx000fy0cxcy1 XCYCZC =ZC1⋅K⋅ R⋅ XWYWZW +t =ZC1⋅K⋅ [R0t1] XWYWZW1 =M⋅ XWYWZW1 = M1M2M3M4M5M6M7M8M9M10M11M12 ⋅ XWYWZW1
2.1 视觉传感器标定原理 – 线性标定法
标定的数学表达解释:输入 n n n个特征点的世界坐标及像素坐标,输出 M M M矩阵
原理:根据一对特征点 P i , p i P_i , p_i Pi,pi ,成像公式可以得到两个线性方程:
[ μ ν 1 ] = [ M 1 M 2 M 3 M 4 M 5 M 6 M 7 M 8 M 9 M 10 M 11 M 12 ] ⋅ [ X i Y i Z i 1 ] {\left[ {\begin{array}{ccccccccccccccc}\mu \\\nu \\1\end{array}} \right] = \left[ {\begin{array}{lllllllllllllll}{\begin{array}{ccccccccccccccc}{{M_1}}&{{M_2}}&{{M_3}}&{{M_4}}\end{array}}\\{\begin{array}{ccccccccccccccc}{{M_5}}&{{M_6}}&{{M_7}}&{{M_8}}\end{array}}\\{\begin{array}{ccccccccccccccc}{{M_9}}&{{M_{10}}}&{{M_{11}}}&{{M_{12}}}\end{array}}\end{array}} \right] \cdot \left[ {\begin{array}{ccccccccccccccc}{{X_i}}\\{{Y_i}}\\{{Z_i}}\\1\end{array}} \right]} μν1 = M1M2M3M4M5M6M7M8M9M10M11M12 ⋅ XiYiZi1

每一对特征点可以转换为两个线性方程,共11个自由度
所以,如果 n > = 6 n>=6 n>=6,即可计算得到 M M M矩阵
实际应用中,一般会用非常多的特征点,基于最小二乘方法求解 M M M矩阵。
如果镜头畸变需要矫正,则需要基于非线性方法,引入非线性畸变模型。一般可以采用非线性优化的方法求解。
2.2 相机畸变模型
2.2.1 径向畸变
由镜头透镜形状引起的畸变称为径向畸变,径向畸变主要分为桶形畸变和枕型畸变。

在针孔相机模型中,一条直线投影到像素平面上还是一条直线。 但在实际中,相机的透镜使得真实环境中的直线在图片中变成了曲线。由于透镜往往是中心对称的,这使得不规则畸变通常径向对称。径向畸变可由三个参数 k 1 , k 2 , k 3 k_1,k_2,k_3 k1,k2,k3确定。
x c o r r e c t e d = x ( 1 + k 1 r 2 + k 2 r 4 + k 3 r 6 ) y c o r r e c t e d = y ( 1 + k 1 r 2 + k 2 r 4 + k 3 r 6 ) \begin{array}{l}{x_{corrected}} = x(1 + {k_1}{r^2} + {k_2}{r^4} + {k_3}{r^6})\\{y_{corrected}} = y(1 + {k_1}{r^2} + {k_2}{r^4} + {k_3}{r^6})\end{array} xcorrected=x(1+k1r2+k2r4+k3r6)ycorrected=y(1+k1r2+k2r4+k3r6)
2.2.2 切向畸变
切向畸变源于透镜不完全平行于图像平面,即感光成像平面装配时与镜头间的角度不准;
产生的影响是图像像素点以畸变中心为中心点,沿着切向产生的位置偏差;
切向畸变由两个参数 p 1 , p 2 p_1,p_2 p1,p2确定。
x c o r r e c t e d = x + [ 2 p 1 x y + p 2 ( r 2 + 2 x 2 ) ] y c o r r e c t e d = y + [ p 1 ( r 2 + 2 y 2 ) + 2 p 2 x y ] \begin{array}{l}{x_{corrected}} = x + [2{p_1}xy + {p_2}({r^2} + 2{x^2})]\\{y_{corrected}} = y + [{p_1}({r^2} + 2{y^2}) + 2{p_2}xy]\end{array} xcorrected=x+[2p1xy+p2(r2+2x2)]ycorrected=y+[p1(r2+2y2)+2p2xy]
结合径向畸变的式子,即可得到畸变矫正的公式: x c o r r e c t e d = x ( 1 + k 1 r 2 + k 2 r 4 + k 3 r 6 ) + 2 p 1 x y + p 2 ( r 2 + 2 x 2 ) y c o r r e c t e d = y ( 1 + k 1 r 2 + k 2 r 4 + k 3 r 6 ) + p 1 ( r 2 + 2 y 2 ) + 2 p 2 x y \begin{array}{l}{x_{corrected}} = x(1 + {k_1}{r^2} + {k_2}{r^4} + {k_3}{r^6}) + 2{p_1}xy + {p_2}({r^2} + 2{x^2})\\{y_{corrected}} = y(1 + {k_1}{r^2} + {k_2}{r^4} + {k_3}{r^6}) + {p_1}({r^2} + 2{y^2}) + 2{p_2}xy\end{array} xcorrected=x(1+k1r2+k2r4+k3r6)+2p1xy+p2(r2+2x2)ycorrected=y(1+k1r2+k2r4+k3r6)+p1(r2+2y2)+2p2xy
2.3 单目相机标定方法
对于单目相机的标定,我们主要需要对以下几个量进行标定:
- 内参矩阵 K K K
- 外参 R , t R,t R,t
- 畸变参数 k 1 , k 2 , p 1 , p 2 k_1,k_2,p_1,p_2 k1,k2,p1,p2
有几种常用的方法用于标定:
一步法:
直接使用最优化方法求出相机内外参数
两步法:
- Tsai法(1987年)
假设: u 0 , v 0 u_0,v_0 u0,v0已知,只考虑径向畸变
标定设备:三维标定块 - 张正友法
假设:只考虑径向畸变
标定设备:平面标定板
2.4 双目相机标定
此部分来源于北京理工大学慕课《无人驾驶车辆》
2.4.1 双目相机模型

左右双目相机有以下特点:
• 光圈中心都在x轴上
• 光圈中心距离称为“基线
将其转化为俯视图,如下所示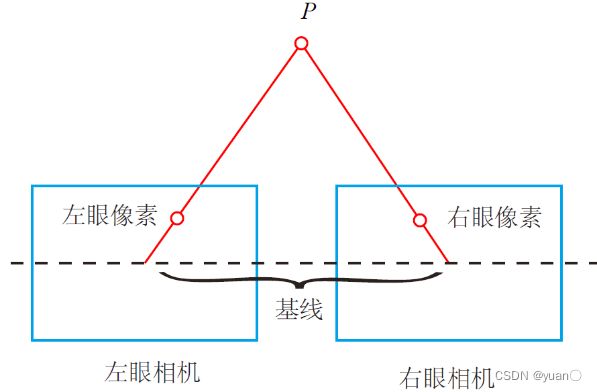 双目相机有以下几何关系
双目相机有以下几何关系

2.4.2 双目相机标定方法
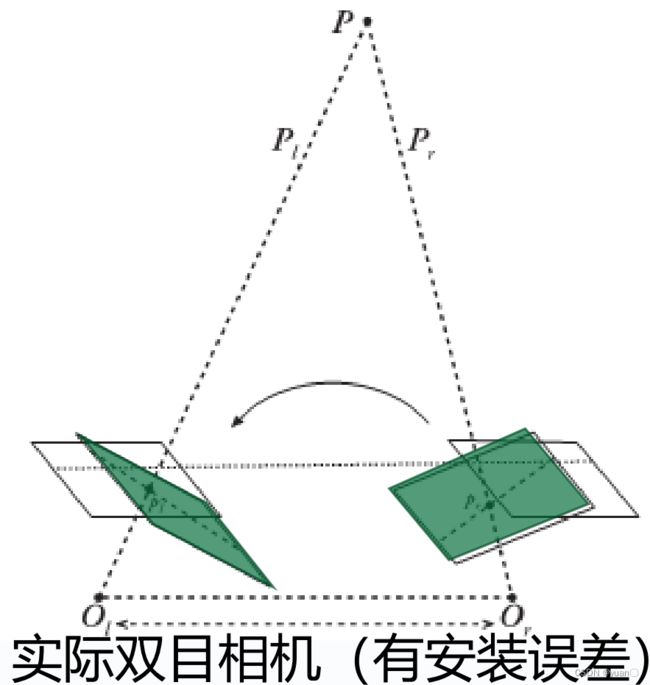 双面相机两相机间的角度可能存在偏差,因此测距原理 z = f b u L − u R z = \frac{{fb}}{{{u_L} - {u_R}}} z=uL−uRfb不再适用,需要进行重新标定。具体标定对象则是两相机之间的相对旋转矩阵与平移向量。
双面相机两相机间的角度可能存在偏差,因此测距原理 z = f b u L − u R z = \frac{{fb}}{{{u_L} - {u_R}}} z=uL−uRfb不再适用,需要进行重新标定。具体标定对象则是两相机之间的相对旋转矩阵与平移向量。

除此之外,两相机之间的相对距离也可能有安装误差,同样需要标定。把左右相机的图像在水平方向严格对齐,对原始图像进行消除畸变,再进行图像校正与图像裁剪,最后就能得到校正后的图像。
2.5 俯视图转化标定——逆透视变换
逆透视变换,英文为IPM (Inverse Perspective Mapping)
原理:根据图片坐标与世界坐标的关系,将图片像素 u v uv uv对应到路面 x y xy xy
难点:一般来说,图片没有距离尺度信息,一个像素点确定一条射线而不能确定是哪个点
解决办法:假设地面平坦且高度已知 ( z = 0 ) (z=0) (z=0),就等于将世界坐标降维到二维,实现 u v uv uv与 x y xy xy的一一对应。

接下来进行公式推导:
- 相机成像公式,内参外参可以合并为一个3乘4矩阵 M M M
Z c [ μ ν 1 ] = [ f x 0 u 0 0 0 f y v 0 0 0 0 1 0 ] [ R 3 × 3 T 3 × 1 0 1 ] [ x y z 1 ] = [ M 1 M 2 M 3 M 4 M 5 M 6 M 7 M 8 M 9 M 10 M 11 M 12 ] ⋅ [ x y z 1 ] \begin{array}{c}{Z_c}\left[ {\begin{array}{ccccccccccccccc}\mu \\\nu \\1\end{array}} \right] = \left[ \begin{array}{l}\begin{array}{ccccccccccccccc}{{f_x}}&0&{{u_0}}&0\end{array}\\\begin{array}{ccccccccccccccc}0&{{f_y}}&{{v_0}}&0\end{array}\\\begin{array}{ccccccccccccccc}0&0&1&0\end{array}\end{array} \right]\left[ {\begin{array}{ccccccccccccccc}{{R_{{\rm{3}} \times 3}}}&{{T_{3 \times 1}}}\\0&1\end{array}} \right]\left[ \begin{array}{l}x\\y\\z\\1\end{array} \right]\\ = \left[ {\begin{array}{lllllllllllllll}{\begin{array}{ccccccccccccccc}{{M_1}}&{{M_2}}&{{M_3}}&{{M_4}}\end{array}}\\{\begin{array}{ccccccccccccccc}{{M_5}}&{{M_6}}&{{M_7}}&{{M_8}}\end{array}}\\{\begin{array}{ccccccccccccccc}{{M_9}}&{{M_{10}}}&{{M_{11}}}&{{M_{12}}}\end{array}}\end{array}} \right] \cdot \left[ {\begin{array}{ccccccccccccccc}x\\y\\z\\1\end{array}} \right]\end{array} Zc μν1 = fx0u000fyv000010 [R3×30T3×11] xyz1 = M1M2M3M4M5M6M7M8M9M10M11M12 ⋅ xyz1 - 假设地面平坦,令 z = 0 z=0 z=0,就可以去掉 M M M的第三列,两侧左乘 M − 1 M^{−1} M−1,并将 Z c Z_c Zc移到右侧,记 w = 1 / Z c w=1/Z_c w=1/Zc, P = M − 1 P=M^{−1} P=M−1 Z c [ μ ν 1 ] = [ M 1 M 2 M 4 M 5 M 6 M 8 M 9 M 10 M 12 ] [ x y 1 ] {Z_c}\left[ {\begin{array}{ccccccccccccccc}\mu \\\nu \\1\end{array}} \right] = \left[ {\begin{array}{ccccccccccccccc}{{M_1}}&{{M_2}}&{{M_4}}\\{{M_5}}&{{M_6}}&{{M_8}}\\{{M_9}}&{{M_{10}}}&{{M_{12}}}\end{array}} \right]\left[ {\begin{array}{ccccccccccccccc}x\\y\\1\end{array}} \right] Zc μν1 = M1M5M9M2M6M10M4M8M12 xy1 [ p 11 ′ p 12 ′ p 13 ′ p 12 ′ p 22 ′ p 23 ′ p 13 ′ p 23 ′ p 33 ′ ] [ μ ν 1 ] = w [ x y 1 ] \left[ {\begin{array}{ccccccccccccccc}{{p_{11}}^\prime }&{{p_{12}}^\prime }&{{p_{13}}^\prime }\\{{p_{12}}^\prime }&{{p_{22}}^\prime }&{{p_{23}}^\prime }\\{{p_{13}}^\prime }&{{p_{23}}^\prime }&{{p_{33}}^\prime }\end{array}} \right]\left[ {\begin{array}{ccccccccccccccc}\mu \\\nu \\1\end{array}} \right] = w\left[ {\begin{array}{ccccccccccccccc}x\\y\\1\end{array}} \right] p11′p12′p13′p12′p22′p23′p13′p23′p33′ μν1 =w xy1
- 归一化:将P中各元素除以 p 33 ′ p_{33}′ p33′, w w w也除以 p 33 ′ p_{33}′ p33′,重新整理得 [ p 11 p 12 p 13 p 12 p 22 p 23 p 13 p 23 1 ] [ μ ν 1 ] = w ′ [ x y 1 ] \left[ {\begin{array}{ccccccccccccccc}{{p_{11}}}&{{p_{12}}}&{{p_{13}}}\\{{p_{12}}}&{{p_{22}}}&{{p_{23}}}\\{{p_{13}}}&{{p_{23}}}&1\end{array}} \right]\left[ {\begin{array}{ccccccccccccccc}\mu \\\nu \\1\end{array}} \right] = w'\left[ {\begin{array}{ccccccccccccccc}x\\y\\1\end{array}} \right] p11p12p13p12p22p23p13p231 μν1 =w′ xy1
记点 A A A在图片中坐标( u A , v A u_A, v_A uA,vA),真实世界坐标( x A , y A x_A, y_A xA,yA),则有 [ w x A w y A w ] = [ p 11 p 12 p 13 p 12 p 22 p 23 p 13 p 23 1 ] [ u A ν A 1 ] \left[ {\begin{array}{ccccccccccccccc}{w{x_A}}\\{w{y_A}}\\w\end{array}} \right] = \left[ {\begin{array}{ccccccccccccccc}{{p_{11}}}&{{p_{12}}}&{{p_{13}}}\\{{p_{12}}}&{{p_{22}}}&{{p_{23}}}\\{{p_{13}}}&{{p_{23}}}&1\end{array}} \right]\left[ {\begin{array}{ccccccccccccccc}{{u_A}}\\{{\nu _A}}\\1\end{array}} \right] wxAwyAw = p11p12p13p12p22p23p13p231 uAνA1 用第三行消去 w w w,得 x A = p 11 u A + p 12 v A + p 13 p 31 u A + p 32 v A + 1 {x_A} = \frac{{{p_{11}}{u_A} + {p_{12}}{v_A} + {p_{13}}}}{{{p_{31}}{u_A} + {p_{32}}{v_A} + 1}} xA=p31uA+p32vA+1p11uA+p12vA+p13 y A = p 21 u A + p 22 v A + p 23 p 31 u A + p 32 v A + 1 {y_A} = \frac{{{p_{21}}{u_A} + {p_{22}}{v_A} + {p_{23}}}}{{{p_{31}}{u_A} + {p_{32}}{v_A} + 1}} yA=p31uA+p32vA+1p21uA+p22vA+p23 矩阵方程形成以 p i j p_{ij} pij作为未知数的2个方程
对 B C D BCD BCD重复上述操作,形成8个方程,就能求解出全部8个未知数