Ubuntu16.04下基于ROS控制Robotiq_2f_85_gripper
一、实验设备
操作系统:Ubuntu 16.04
夹爪型号:Robotiq 2f-85
转换线:RS485转USB
二、Robotiq功能包安装与编译
1.下载Robotiq功能包
上Github 寻找相应功能包 :https://github.com/ros-industrial/robotiq/tree/kinetic-devel
我们使用的是 kinetic 版本
可手动下载,也可终端敲指令,个人喜欢手动下载,可视化操作,记得解压放到工作空间中 src 文件夹即可
cd catkin_ws/src/
git clone https://github.com/ros-industrial/robotiq.git
下载的功能包中包含了二指夹爪,三指夹爪,力传感器,通信相关的文件,可保留与实验相关的文件,删去其他文件。
2.编译Robotiq相应功能包
#安装依赖
rosdep install robotiq_modbus_rtu
sudo apt-get install ros-kinetic-soem
#编译功能包
#切换到工作空间中
cd ~/catkin_ws/
#依次编译功能包,编译过程中缺少依赖报错,安装相应依赖
catkin_make -DCATKIN_WHITELIST_PACKAGES="robotiq_2f_85_gripper_visualization"
第一次编译出现状态正常,但不能建立相应的 build 文件,可能是直接下载的文件命名有问题,直接下载的文件名为 robotiq-kinetic-devel ,中间的 “-” 是中文字符,将其修改成 “_” 即可通过。
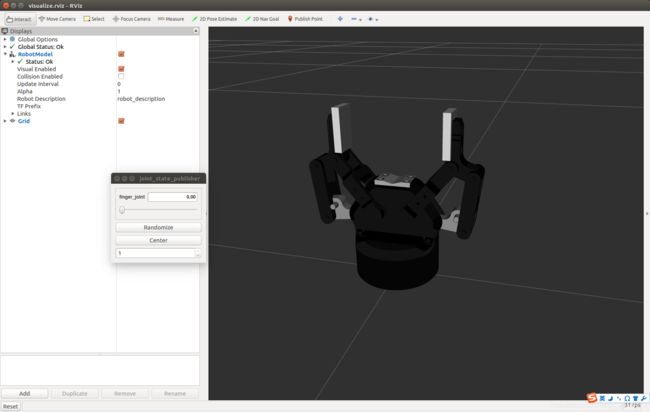
3.robotiq_2f_85_gripper_visualization
Rviz 中查看夹爪
roslaunch robotiq_2f_85_gripper_visualization test_2f_85_model.launch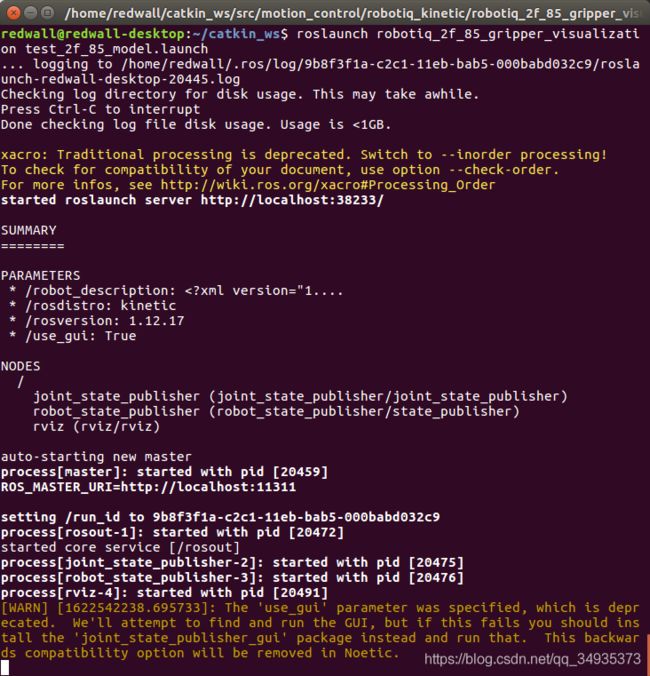
终端中出现两段橙黄色字段;针对这两段描述,进行修改:
xacro: Traditional processing is deprecated. Switch to --inorder processing!
To check for compatibility of your document, use option --check-order.
For more infos, see http://wiki.ros.org/xacro#Processing_Order
解决方法:在读取xacro文件时,需要添加 --inorder 。
[WARN] [1622542545.143980]: The 'use_gui' parameter was specified, which is deprecated. We'll attempt to find and run the GUI, but if this fails you should install the 'joint_state_publisher_gui' package instead and run that. This backwards compatibility option will be removed in Noetic.
解决方法:用 joint_state_publisher_gui 替换原本的 joint_state_publisher ,然后删除launch中对use_gui的设置。若没有安装 joint_state_publisher_gui ,使用如下命令安装:
sudo apt-get install ros-kinetic-joint-state-publisher-gui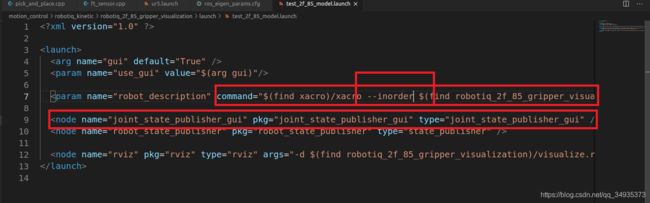
4.robotiq_2f_gripper_control
这里主要介绍三个在官方教程中提到的文件。
4.1 Robotiq2FGripperRtuNode.py
官方教程上,通过该文件与夹爪连接
#The Gripper status is published on the topic named 'Robotiq2FGripperRobotInput'
pub = rospy.Publisher('Robotiq2FGripperRobotInput', inputMsg.Robotiq2FGripper_robot_input)
#The Gripper command is received from the topic named 'Robotiq2FGripperRobotOutput'
rospy.Subscriber('Robotiq2FGripperRobotOutput', outputMsg.Robotiq2FGripper_robot_output, gripper.refreshCommand)
从该文件中,可以看到:
第一段,不断查询抓手状态并发送。
第二段,用来接受用户输入的抓手控制信息,通过回调函数转给夹手。
4.2 Robotiq2FGripperStatusListener.py
该文件用来监听夹爪状态
4.3 Robotiq2FGripperSimpleController.py
向抓手输出控制信息
三、连接Robotiq_2f_85_gripper
1. 连接Robotiq_2f_85_gripper的接线
因之前 Robotiq_2f_85_gripper 通过示教器进行控制,电线已经接好了,其中两根 24V 的电源线接在 UR 控制柜中的 24V、0V 端口,两根控制信号线,一根屏蔽线通过 RS485 转 USB 线接在 UR 控制柜内部的 USB 接口。我们只需将该 USB 线从控制柜引出,接在计算机上即可。
2. 修改、配置串口
可参考我们的串口设置博客 串口在ros中的使用
#提供权限
#YOURUSERNAME 计算机用户名
sudo usermod -a -G dialout YOURUSERNAME
#查看连接的串口
dmesg | grep tty一般均为 ttyUSB0 ,可以根据显示的串口信息修改后面的命令。
确保夹爪能与计算机正常通信。
3. 控制夹爪
3.1启动夹爪驱动程序节点
roscore
rosrun robotiq_2f_gripper_control Robotiq2FGripperRtuNode.py /dev/ttyUSB0
此时,夹爪上的指示灯由红色变为蓝色,表明夹爪可以正常工作了。
3.2 启动Robotiq_2f_85_gripper简单控制器节点
rosrun robotiq_2f_gripper_control Robotiq2FGripperSimpleController.py
终端中会出现一些操作提示
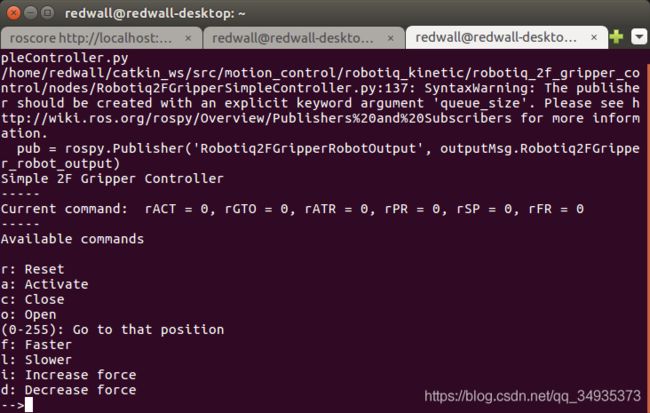
我们先要 (r键)reset 重置夹爪,然后 (a键)activate 激活夹爪,再进行其他操作
可以输入 o 或 c 执行张开闭合动作;
输入 0-255 的数字,0 是开合到最大位置,255 是完全关闭,回车后电爪即可执行;
可以输入 f 或 l 控制夹爪动作的快慢;
输入 i 增加夹取力;
输入 d 减小夹取力。
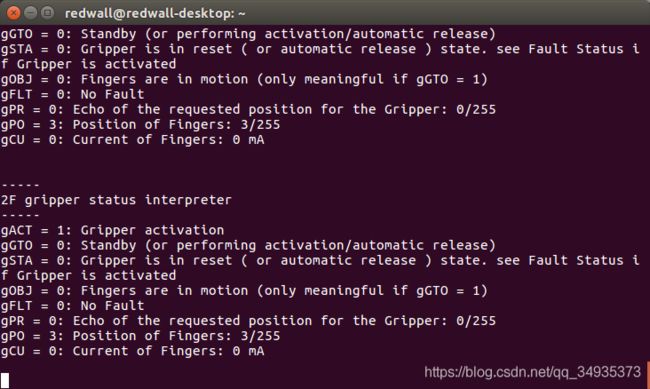
3.3 启动Robotiq_2f_85_gripper状态监听器节点
rosrun robotiq_2f_gripper_control Robotiq2FGripperStatusListener.py可通过终端查看到夹爪当前的位置信息,电流大小等
参考链接
1. http://wiki.ros.org/robotiq
2. http://wiki.ros.org/robotiq/Tutorials/Control%20of%20a%202-Finger%20Gripper%20using%20the%20Modbus%20RTU%20protocol%20%28ros%20kinetic%20and%20newer%20releases%29
3. https://blog.csdn.net/weixin_42268975/article/details/105151377?spm=1001.2014.3001.5501
4.https://blog.csdn.net/qq_33007107/article/details/96170248