【国六总结】蓝桥杯复习资料(含外设代码)
瞎叨叨
喜报:十三届国赛300块买了个3XL抹布!
这次属实是被套路了,确实可以不用拓展版,但就是调试麻烦。
今年是最后一年参加蓝桥杯了,走出考场速板子挂小黄鱼,出去搓了顿好的。
这个资料实际上是省赛之前自己写了复习用的,好巧不巧今年没考拓展版上的外设,如果你是来找拓展版外设的那可以Ctrl+W换下一篇了。
客观题
好像官方是有本书,上面有客观题,不清楚。 这东西基本靠平时积累,不可能完全考前突击。下面是总结的十二届之前的部分客观题。
STM32相关
0.部分题目答案可以直接在Cube或者手册里找;
1.RS232通信最少需要3根线;
2.STM32提供的是3级流水线,哈佛结构;
3.STM32不支持双字数据类型;
4.STM32内部ADC的工作原理是逐次逼近;
5.8080接口不属于串行通信;
6.RS232通信中,逻辑1电平电压 -5V~-15V ;
7.实现A/D转换的方法有逐次逼近法、计数法、双积分法;
8.嵌入式系统中按照总线所传送的信息类型,可以分为数据总线、地址总线、控制总线等;
9.能够以菊花链方式连接的接口是SPI、JTAG;
10.使用STM32开发USB外设应使用HSE时钟源;
11.Cortex-M3中可以使用小端格式访问代码;
12.某存储芯片存储容量为8KB,数据线8根,地址线13根(8KB = 8 * 1024Byte = 2 ^ 13);
13.STM32F103RBT6每个DMA通道具有3事件标志;
14.一个功能简单但需要频繁调用的函数,比较适用内联函数;
15.STM32片内FLASH一次可以写入16位;
16.RS485最少需要2根线进行通信;
17.高性能不是一般嵌入式系统设计的主要目标;
18.ARM处理器有7种工作模式;
19.为了用二进制数表示十进制数,常使用 BCD 编码;
20.Unicode 编码可以用于表示汉字;
21.ASCII一共128个字符;
22.STM32 微控制器 USART1 的波特率通过PCLK2提供;
23.中断优先级用4位编辑(0x00~0xFF -> 0000 ~ 1111);
24.Cortex M3 系列处理器支持 Thumb-II 指令集
25.Cortex M3 可以支持对单一的比特位进行读写操作的操作
26.在 STM32 处理器中一个 DMA 请求,至少占用2个周期的 CPU 访问系统总线时间;
27.STM32 处理器 APB2 上的 IO 引脚最大翻转速度为18MHz;
28.USB通信速率 大于 RS232;
29.Cortex-M3处理器中的寄存器R14代表链接寄存器,R15代表程序计数寄存器;
30.NAND FLASH存储器和 NOR FLASH存储器的区别是NAND FLASH 擦除单元较小;
31.Corte-M3有2个堆栈,同一时间只能调用一个;
32.微控制器掉电后重新上电、NRST引脚上的低电平、微控制器看门狗定时器计数终止、将复位寄存器的特定位清零可以触发 STM32 微控制器复位;
33.外设分为内核外设和片上外设,内核外设有Systick,NVIC,SCB,MPU;
34.
大部分数电模电
1.数字时序逻辑电路输出与电路原状态和当前输入有关;
2.能够实现线与的是OC门;
3.温度升高时,二极管反向饱和电流将增大;
4.设计一个8421BCD码计数器至少需要4个触发器;
5.高阻抗信号源和低阻抗负载间适合接入共集电路进行阻抗匹配;
6.将三角波转换为矩形波需使用施密特触发器;
7.将矩形波输入到积分电路可以得到三角波;
8.场效应管导通电阻与 V G S V_{GS} VGS 和 温度 有关;
9.N 个触发器构成的计数器中,有效状态最多有2^N个;
10.欲提高电压比较器的抗干扰能力,应选用滞回比较器;
11. 两个电压放大倍数相同(电路相同,且采用同一种晶体管)的 A 和 B 电路,对同一个信号源的电压进行放大,在负载开路的条件下,测得 A 电路的输出电压较小,不考虑仪表的测量误差,这说明 A 电路输入电阻小;
12. RLC 串联电路的谐振频率为=1000,当频率为 800Hz 的正弦电压源激励时该电路呈容性;
13. 信号不全都可以用一个确定的时间函数来描述;
14. 由 5 个 D 触发器构成的环形计数器,其计数长度为5;
15. 数字电路中,三极管相当于一个开关,通常工作在饱和、截止状态;
16. 两个逻辑函数恒等,则它们必然具有唯一的真值表;
17. 不具有压电效应的滤波器是LC滤波器、RC滤波器;
18. 施密特触发器常用于对脉冲波形的整形;
19. 运算放大器差模增益高、输入阻抗高、失调较小、输出阻抗低;
20. 单个运算放大器和若干个电阻无法构成振荡器、乘法器;
21. 分析运算放大器的依据是 U N ≈ U P U_N≈U_P UN≈UP , I N ≈ I P I_N≈I_P IN≈IP;
22. 三态门的输出状态包括:高电平,低电平,高阻态;
23.
三极管
工作参数计算
I C M I_{CM} ICM:集电极最大允许电流;
P C M P_{CM} PCM:集电极最大允许功率, P C = I C ∗ U C E P_{C}=I_C*U_{CE} PC=IC∗UCE;
U ( B R ) C E O U_{(BR)CEO} U(BR)CEO:反向击穿电压, U C E > U ( B R ) C E O U_{CE}>U_{(BR)CEO} UCE>U(BR)CEO会导致 I C I_C IC急剧增大,三极管烧毁;
例题:

题目给了四组参数,没有任何一组 U C E U_{CE} UCE过大,但B选项 I C I_C IC过大,先选上;然后开始计算剩下各组 P C P_{C} PC,C选项120mW大于最大功率,故答案选BC。
工作状态判断
对于NPN型三极管
放大区: U C > U B > U E U_C>U_B>U_E UC>UB>UE,发射结正偏,集电结反偏;
截止区: U B < U C , U B < U E U_B
饱和区: U C E < U B E U_{CE}
三极管用作开关管时,通常工作在饱和区和截止区。
例题:
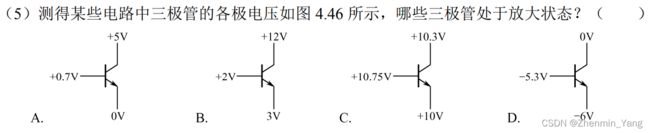
A选项明显符合放大区要求,B选项在截止区,C选项在饱和区,D选项注意负号,实际也是在放大区,答案选AD。
运算放大器
首先是虚短和虚断的概念。简单说,虚短就是运放工作在线性区时,两输入端可被视为等电位(实际并不能物理短路两输入端);虚断是由于理想运放输入电阻无穷大,所以几乎没有电流流入运放输入端,可以被视作断路。
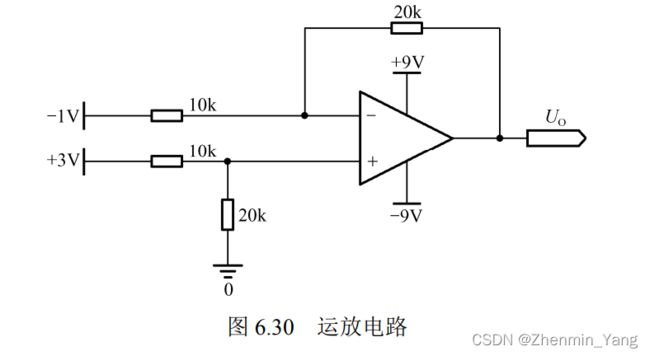
最常规的例1
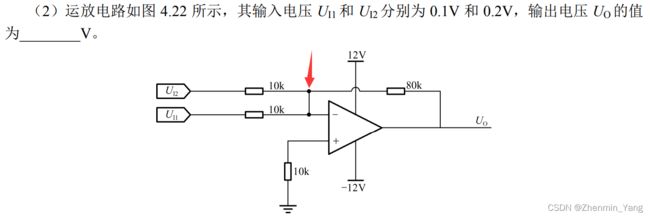
根据虚短,反相输入端电流全部流过80K反馈电阻,可以对红色箭头所指节点应用KCL, 0.1 V 10 K + 0.2 V 10 K = U O 80 K \frac{0.1V}{10K} + \frac{0.2V}{10K} = \frac{U_{O}}{80K} 10K0.1V+10K0.2V=80KUO,最后算出 U O = 2.4 V U_O = 2.4V UO=2.4V,反向输入端加上负号,故答案是-2.4V。
挖了大坑的例2
有些题目会强调单电源供电,此时结果就不符合上面的公式了。例题:
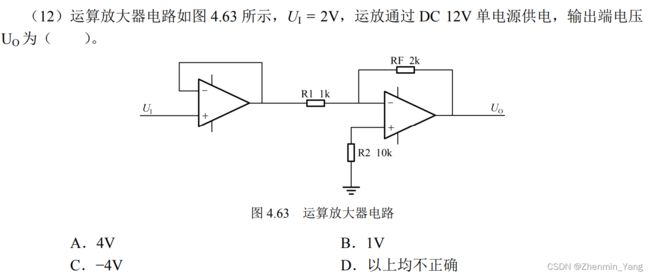
正常思路,前面是同向电压跟随器,后面是反向放大器,算出来-4V,选C。但这个题强调了是DC 12V单电源供电,所以不选C,选D。Multisim仿真结果是1.36V,具体咋算我也不大清楚(祈祷别出个这玩意儿给你算吧)。
还能这样玩的例3
带RC电路的题目,需要计算上限/下限频率。例题:
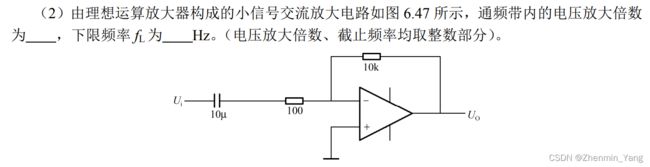
RC电路截止频率 f = 1 / ( 2 π R C ) f=1/(2{\pi}RC) f=1/(2πRC),其中电容C的单位为法拉F。对于这个题,先换算电容单位,10uF=10^-6F=0.00001F,带入公式计算,约为159.155Hz,按题目要求取整,答案为159Hz。放大倍数 = - 10K / 100 = -100,答案为-100倍。
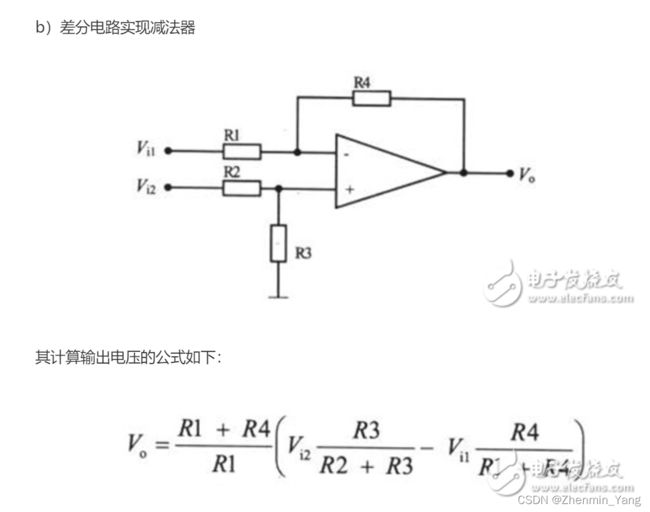
我看不懂但大受震撼的例4
还有一种差分减法器,如题:
这个就只有问百度了,真考到听天由命
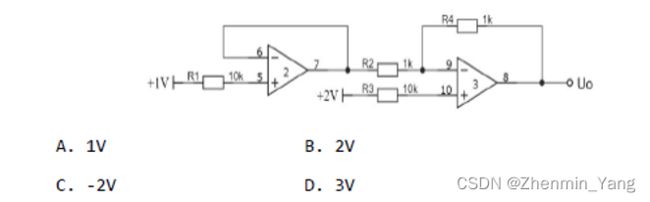
十三届第一场省赛的例5
写这部分的的时候是2022年5月8日,离第二场省赛好像还有6天。因为看不懂一个多月前写的虚短虚断是啥玩意儿,于是把第一场省赛的题拿来分析一遍。
先说仿真结果,3V。
然后再来分析,如下图:
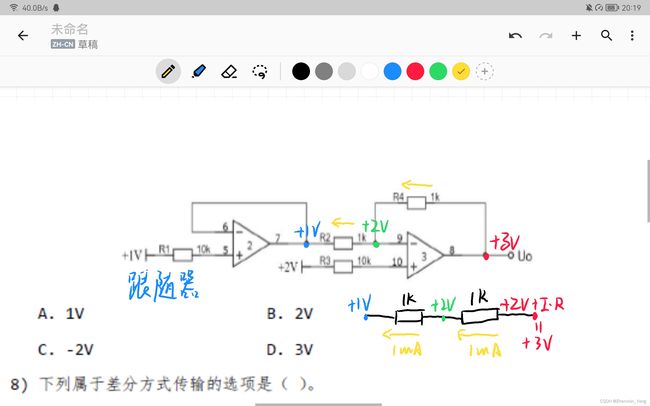
前一个部分,典型的电压跟随器,输出电压(蓝色节点)为+1V。后半部分,由运放虚短可知,绿色节点电压与正向端输入电压相等,应为+2V;由运放虚断,可提出题目下面的那个手绘模型,接下来对绿色节点用KCL就解出来了:流出电流1mA,流入也应为1mA,红色节点电压应为绿色电压+I*R=+3V,分析完毕。
外设代码
HAL库还是LL库?
个人认为,评测系统中的一个指标是代码大小。在用HAL库狠凹第一套模拟题之后,各项功能已经是1:1复刻官方参考答案了,但仍只有89.2分(官方LL库答案98.2分),据此猜测代码大小也是评分指标之一,当然也只是猜测。之后我也尝试用LL库编写程序,但奈何水平不够,各个功能整合起来之后稳定性不如HAL库,以后有机会一定好好学学LL库。
FPU
相传在MDK的options for target的target选项卡下可以直接设置,但还是感觉用宏定义更安心一点,反正也费不了一分钟。在模拟测评中开不开对分数没有影响。
//MDK->Options for Target->C/C++->Define
__FPU_USED=1U,__TARGET_FPU_VFP,ARM_MATH_CM4
LED
LED部分最简单的操作方法就是操作ODR寄存器,有两种方法,在模拟评测系统上分数是一样的,但方法二更直观一些,临场不容易写错+易分析,故优先采用方法2。寄存器内容参考RM0440参考手册(英文手册实际上也没那么难看懂,至少GPIO部分不会有很多很多专业词+生僻词)。
//方法一:按位运算得到ODR的值
uint8_t code = 0x00; //注意两个方法初始code恰好相反
void LED_SetStatus(uint8_t status, uint8_t serial)
{
if(status == LED_ON)
{
code = code | (0x01 << (serial - 1));
GPIOC->ODR = ~(code << 8);
}
else if(status == LED_OFF)
{
uint8_t temp = ~code;
temp = temp | (0x01 << (serial -1));
code = ~temp;
GPIOC->ODR = (temp << 8);
}
else
{
code = 0x00;
GPIOC->ODR = (0xFF << 8);
}
HAL_GPIO_WritePin(LE_GPIO_Port, LE_Pin, GPIO_PIN_SET);
HAL_GPIO_WritePin(LE_GPIO_Port, LE_Pin, GPIO_PIN_RESET);
}
//方法二:操作BSRR控制ODR
void LED_SetStatus(uint8_t serial, uint8_t status)
{
if(status == LED_ON)
{
GPIOC->ODR = code << 8;
GPIOC->BSRR = 0x01 << (23 + serial); //Set BRx
code = GPIOC->ODR >> 8;
}
else if(status == LED_OFF)
{
GPIOC->ODR = code << 8;
GPIOC->BSRR = 0x01 << (7 + serial); //Set BSx
code = GPIOC->ODR >> 8;
}
else
{
code = 0xFF;
GPIOC->ODR = (code << 8);
}
HAL_GPIO_WritePin(GPIOD, GPIO_PIN_2, GPIO_PIN_SET);
HAL_GPIO_WritePin(GPIOD, GPIO_PIN_2, GPIO_PIN_RESET);
}
按键
实现方案很多,还有用定时中断检测按键的(这个试了试效果不是很稳定,就弃了,也可能是我写的姿势不对)。除了写的这个方法,还可以用读IDR实现。经实验,分数也是没差别。长短按?省赛没写,国赛也不是用自己电脑,就简单说个思路吧:用1ms(1KHz)的定时器中断数数,判断是长按还是短按。
uint8_t KEY_CheckStatus(void)
{
keyPressed = 0;
if(HAL_GPIO_ReadPin(KEY1_GPIO_Port, KEY1_Pin) == GPIO_PIN_RESET)
{
HAL_Delay(10);
if(HAL_GPIO_ReadPin(KEY1_GPIO_Port, KEY1_Pin) == GPIO_PIN_RESET)
{
keyPressed = 1;
}
}
if(HAL_GPIO_ReadPin(KEY2_GPIO_Port, KEY2_Pin) == GPIO_PIN_RESET)
{
HAL_Delay(10);
if(HAL_GPIO_ReadPin(KEY2_GPIO_Port, KEY2_Pin) == GPIO_PIN_RESET)
{
keyPressed = 2;
}
}
if(HAL_GPIO_ReadPin(KEY3_GPIO_Port, KEY3_Pin) == GPIO_PIN_RESET)
{
HAL_Delay(10);
if(HAL_GPIO_ReadPin(KEY3_GPIO_Port, KEY3_Pin) == GPIO_PIN_RESET)
{
keyPressed = 3;
}
}
if(HAL_GPIO_ReadPin(KEY4_GPIO_Port, KEY4_Pin) == GPIO_PIN_RESET)
{
HAL_Delay(10);
if(HAL_GPIO_ReadPin(KEY4_GPIO_Port, KEY4_Pin) == GPIO_PIN_RESET)
{
keyPressed = 4;
}
}
if(keyPressed != keyPrevious) //检测与上次按键是否相同
{
keyPrevious = keyPressed; //不同则代表是第一次检测到,更新上次键值
}
else
{
keyPressed = 0; //相同则代表之前已经检测过了,按下键值返回0
}
return keyPressed;
}
UART
一步登顶,直接DMA+空闲中断,省得纠结。
void UART_Init(void)
{
__HAL_UART_ENABLE_IT(&huart1,UART_IT_IDLE);
HAL_UART_Receive_DMA(&huart1, rxBuf, sizeof(rxBuf));
}
void UART_IRQHandler(UART_HandleTypeDef *huart) //记得添加到it文件里
{
if(huart->Instance == USART1) //串口1中断,如果是扔对应IRQHandler里的话这个if实际上没必要
{
if(__HAL_UART_GET_FLAG(&huart1, UART_FLAG_IDLE) != RESET) //串口1空闲
{
HAL_UART_DMAStop(&huart1);
uint8_t lenMsgReceived = sizeof(rxBuf) - __HAL_DMA_GET_COUNTER(&hdma_usart1_rx);
memcpy(rxDest, rxBuf, lenMsgReceived); //copy数据,不在中断里处理数据
memset(rxBuf, 0x00, sizeof(rxBuf));
rxFlag = 1;
__HAL_UART_CLEAR_IDLEFLAG(&huart1);
HAL_UART_Receive_DMA(&huart1, rxBuf, sizeof(rxBuf));
}
}
}
PWM
PWM生成
PWM,预分频器(PSC) = timer频率 - 1,计数周期(CP)= 1,000,000 / 目标频率 - 1。如时钟频率170MHz,要输出100Hz的PWM波,PSC定170-1,CP定1,000,000 / 100 = 10,000 - 1。如果是设置一个100ms的定时器,则采用PSC 1700-1 & CP 10000-1的组合,(因为大多定时器CP是16位的,写不到100000)。
void PWM_Init(void)
{
__HAL_TIM_SetCompare(&htim3, TIM_CHANNEL_2, 500);
__HAL_TIM_SetCompare(&htim16, TIM_CHANNEL_1, 1000);
HAL_TIM_PWM_Start(&htim3, TIM_CHANNEL_2);
HAL_TIM_PWM_Start(&htim16, TIM_CHANNEL_1);
//定时器中断用HAL_TIM_Base_Start_IT()
}
void PWM_SetDuty(float duty)
{
if(pwmDuty != pwmDutyPrevious)
{
pwmDutyPrevious = pwmDuty;
uint16_t tmpDuty = (uint16_t)((pwmPeriod + 1) * pwmDuty);
__HAL_TIM_SetCompare(&htim3, TIM_CHANNEL_2, tmpDuty);
}
}
void PWM_SetFreq(uint16_t frq)
{
if(frq != pwmFreqPrevious)
{
pwmFreqPrevious = frq;
pwmDutyPrevious = 0.0f; //强制刷新占空比
pwmPeriod = (uint16_t)(1000000 / frq);
PWM_SetDuty(pwmDuty);
__HAL_TIM_SetAutoreload(&htim3, pwmPeriod - 1);
}
}
频率测量
没大用过,直接上流程:
1.目标通道,选择Input Capture direct mode(直接捕获)
2.PSC=timer频率 - 1,计数周期直接拉满
3.向上计数,关闭自动重装载(这个应该是默认的)
4.开中断!开中断!!开中断!!!
频率测量原理:MCU捕获到方波上升沿产生中断,在中断回调函数中读取计数值,频率 = 1,000,000 / 计数值,然后清零计数器重新计数。
void TIM_Init(void)
{
HAL_TIM_IC_Start_IT(&htim2, TIM_CHANNEL_1);
}
void HAL_TIM_IC_CaptureCallback(TIM_HandleTypeDef *htim)
{
cc1_value_2 = __HAL_TIM_GET_COUNTER(&htim2);
__HAL_TIM_SetCounter(&htim2,0);
frqCapture = 1000000/cc1_value_2;
HAL_TIM_IC_Start_IT(&htim2, TIM_CHANNEL_1);
}
占空比测量
占空比测量实现的思路:使用一路定时器通道,配置为捕获上升沿,在捕获到上升沿触发中断后,记录当前计数值,然后改为捕获下降沿;捕获到下降沿触发中断后,即可计算出高电平时间,然后改为捕获上升沿。为求出占空比,还需得到输入信号周期,记录下两次上升沿间隔时间即可。
if(htim->Instance == TIM2)
{
if(htim->Channel == HAL_TIM_ACTIVE_CHANNEL_1)
{
if(timDutyTestStep == 0) //捕获上升沿
{
timDutyValue[2] = __HAL_TIM_GET_COMPARE(&htim2, TIM_CHANNEL_1);
if(timDutyValue[2] < timDutyValue[0])
{
timCapWidth = (0xFFFF - timDutyValue[2]) + timDutyValue[0]; //0xFFFF为16位寄存器上限值,需注意CP具体位数
}
else
{
timCapWidth = timDutyValue[2] - timDutyValue[0];
}
timCapFreq = 1000000 / timCapWidth; //计算捕获信号频率
timDutyValue[0] = timDutyValue[2];
__HAL_TIM_SET_CAPTUREPOLARITY(&htim2,TIM_CHANNEL_1,TIM_INPUTCHANNELPOLARITY_FALLING); //设定为捕获下降沿
timDutyTestStep = 1;
}
else
{
timDutyValue[1] = __HAL_TIM_GET_COMPARE(&htim2, TIM_CHANNEL_1);
if(timDutyValue[0] > timDutyValue[1]) //向上计数,说明定时器溢出
{
timDutyHigh = (0xFFFF - timDutyValue[0]) + timDutyValue[1]; //0xFFFF为16位寄存器上限值,需注意CP具体位数
}
else
{
timDutyHigh = timDutyValue[1] - timDutyValue[0];
}
__HAL_TIM_SET_CAPTUREPOLARITY(&htim2,TIM_CHANNEL_1,TIM_INPUTCHANNELPOLARITY_RISING); //设定为捕获上升沿
timDutyPct = (float)timDutyHigh / (float)timCapWidth;
timDutyTestStep = 0;
}
}
}
这东西国赛之前应该不会考,两个方波测
反转了,国赛没用拓展板
ADC
板子提供了两路模拟输出,分别接到PB12(ADC1_IN11)、PB15(ADC2_IN15)。因为不是同一个ADC,所以不需要开非连续转换模式。国赛题目暂时没深究,可能会用到同一个ADC的多个通道,这个到时候注意一下。
HAL_ADCEx_Calibration_Start(&hadc2, ADC_SINGLE_ENDED); //自动校准ADC2,加在ADC初始化后
void ADC_ReadValue(void)
{
HAL_ADC_Start(&hadc2);
if(HAL_ADC_PollForConversion(&hadc2, ADC_CHANNEL_15) == HAL_OK)
{
voltRead = (float)HAL_ADC_GetValue(&hadc2) / 4095.0f * 3.3f;
}
}
时间紧也没测试,但只要开了连续转换,多叠几个if应该就行。13国赛好像只有新板子需要连续转换,旧版似乎可以直接用两个ADC。
I2C
看眼原理图,再看眼Cube,好的,只能用软件I2C,不过资源包里给底层代码了,所以问题不大。
解决了底层驱动问题,现在就该考虑时序问题了。查找数据手册:
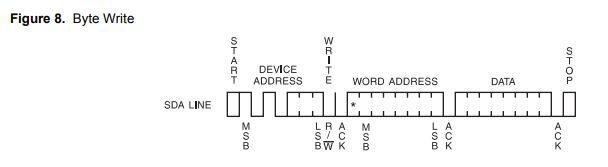
写入操作顺序:发START–>发设备写地址(0xA0)–>等待响应(ACK)–>发送存储单元地址–>等待响应–>数据内容–>等待响应–>发STOP。需要注意的是,地址的二进制数最后一位必须是0(R/W位,0为写)。
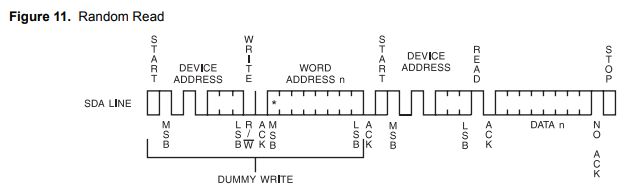
读取时应选用随机读取,操作顺序:发START–>发设备写地址(0xA0)–>等待响应–>发送目标存储单元地址–>等待响应–>发START–>发设备读地址(0xA1)–>等待响应–>接收内容–>发STOP
把稳起见可以加一个和校验。
RTC(这个没写)
RTC新板没给例程,模拟题没见过,大概不考吧。
RES可编程电阻(这个也没写)
据说这个是新板子才有的模块,今年还能用旧版,所以判断不会考。真要考了就照着手册写。
DAC
直接选择Connected to external pin only,剩下配置都不用改。

代码也很简单
void Dac1_Set_Vol(float vol)
{
uint16_t temp;
temp = (4096*vol/3.3f);
HAL_DAC_SetValue(&hdac1, DAC_CHANNEL_1,DAC_ALIGN_12B_R,temp);
}
总结
总之就是这样,蓝桥杯生涯画句号啦。因为国赛没用自己电脑,比赛的实验室20级在做课设,加上写的也不好,就懒得去拷了(LCD翻转是真离谱)。附上13届省赛代码,基本没啥问题,EEPROM上电校验可以再改进改进。
省赛代码:https://download.csdn.net/download/qq_26942797/85683923