NUC980模拟时序驱动595输出动态扫描数码管驱动程序
从瑞萨单片机移植到NUC980数码管动态扫描驱动,硬件定时器定时刷新
驱动源码
#include 测试代码
#include -w\n" );
return -1;
}
fd = open(argv[1],O_RDWR);
if( fd<0 ){
printf("applog: can not open file %s\n",argv[1]);
return -1;
}
if( 0 == strcmp(argv[3],"-w") ){
write(fd,argv[2],4);
printf("applog: write - %d\n",value);
}
else{
close(fd);
return -1;
}
close(fd);
return 0;
}

数码管从淘宝买,2个595驱动4位数码管
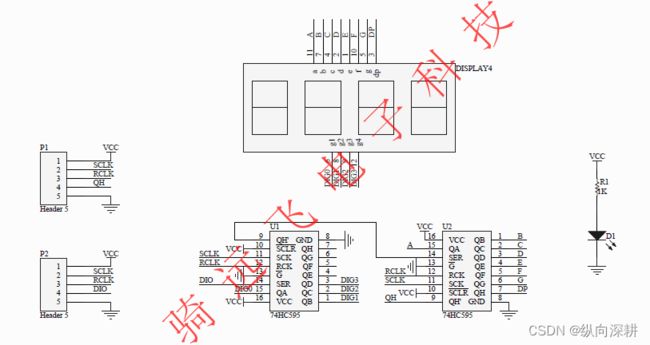
NUC980模拟时序驱动数码管