【论文阅读】一种利用地理实体目标特征的道路场景激光点云配准方法
目录
- 1 引 言
- 2 道路场景点云配准方法
-
- 2.1 车载点云分段
- 2.2 配准基元的选取
- 2.3 多尺度关键点的提取
- 2.4 渐进式配准
- 3 实验与分析
-
- 3.1 实验数据
- 3.2 关键点提取结果
- 3.3 配准结果
- 4 结论
- 5 参考文献
摘 要 针对车载移动测量系统不同时期获取的道路场景点云位置一致性差、车载激光点云与固定站激光点云坐标基准不统一的问题,本团队提出了一种利用地理实体目标特征的道路场景激光点云配准方法。首先分析道路场景激光点云的数据特点,结合高程误差趋势和道路场景地物的分布特征对车载点云进行分段,分割条带分布的车载道路点云为连续分布的小范围分段点云;然后提取固定地理实体目标作为配准基元,以降低场景的复杂度;接着结合特征值与形状指数构建特征约束,提取配准基元的多尺度关键点;最后在关键点约束下应用4PCS和双向KD树改进的ICP算法,完成多期道路车载激光点云的配准以及固定站与车载点云的配准。实验结果表明:多期车载点云配准精度在5 cm范围内,固定站与车载点云的配准精度最高可达到4.2 cm。所提方法为道路场景激光点云的高精度融合提供了可行方法。
关键词 遥感;道路场景;多期车载点云;固定站点云;配准基元;关键点约束;点云配准
中图分类号 P 237 文献标识码 A
1 引 言
道路是城市发展的命脉,准确、实时的道路三维信息对城市的管理具有十分重要的作用。车载激光扫描(MLS)作为一种先进的测量手段,能够快速动态采集高精度、高密度的大场景三维激光点云数据,在获取道路三维信息方面具有独特优势[1]。固定站激光扫描(TLS)具有机动灵活、便于携带等优点,通过多测站、多角度扫描能完整覆盖地物局部细节特征[2]。目前,以MLS与TLS相结合的数据获取方式已在智能交通、数字城市等科学和工程研究中发挥重要作用[3]。但是在实际工程中,多期、多平台数据的融合处理中还存在一些难题 ,如:1)受全球导航卫星系统(GNSS)定位误差、惯性测量单元(IMU)定姿误差、扫描仪测角和测距误差等的综合影响,MLS系统对同一区域多次采集的点云之间存在厘米甚至米级偏差[4],并且不同路段MLS点云之间的偏差为非刚性变化,在后续高精度配准纠正处理时难度较大;2)车载平台扫描仪自身存在视场限制,并且道路场景地物之间存在相互遮挡,需要采用TLS系统对重点区域和数据空洞进行补测;3)MLS点云为地理坐标系,TLS点云为测站局部坐标系,需要通过配准完成坐标基准统一[5],但MLS系统与TLS系统的观测视角、点云数据质量等存在较大差异,配准难度较大。
点云配准主要采用Besl等[6]提出的迭代最近点(ICP)算法,该算法具有良好的配准精度,但是当点云的初始位置偏差较大时容易陷入局部最优,使配准失败。因此,需要通过粗配准来提供良好的初始位置。粗配准算法一般包括两类:1)基于RANSAC框架的配准,如采样一致性(SAC-IA)算法[7]、4PCS算法[8]、K4PCS算法[9]等;2)基于概率模型的配准,如正态分布变换(NDT)算法[10]。在海量离散点云数据的配准中,为了提高配准的效率和精度,通常采用局部关键点和区域特征描述来确定表面之间的对应关系。常用的关键点检测算法[11]有ISS、LSP、3D-SIFT、3D-HARRIS、NARF、KPQ、HSK等。
针对道路同向或往返不同时期MLS点云的配准,现有方法可分为数据驱动和传感器驱动两类[12]。数据驱动方法:假设点云数据在一定范围内满足刚性变换,利用同名特征之间的一致性关系,基于ICP及其改进算法直接进行配准;传感器驱动方法:假设短时间内组合导航的位姿误差很小,通过改正车辆轨迹的位置、姿态,重新解算点云数据。
文献[13-15]利用数据驱动方法对点云进行配准。文献[13]首先对点云进行分块,然后在每个分块内采用点到面的ICP完成分块内点云的配准,最后将分块合并实现全部点云的配准;但该方法会造成相邻分块之间出现缝隙。文献[14]首先根据强度信息从点云数据中提取高反射强度的交通标志,然后基于ICP对交通标志进行配准,最后使用变换矩阵完成全部点云的配准;该方法配准的精度取决于交通标志的提取质量,对采集数据的强度特征要求较高。文献[15]首先以时间间隔对点云进行分段,然后提取分段内的固定地物,并结合法向量夹角与LSP关键点检测法提取地物的特征点,最后结合4PCS和ICP算法完成点云配准;该方法的道路分段策略及特征点分布存在不足,容易导致配准误差增大、效率降低。
文献[16-18]利用传感器驱动方法对点云进行配准。文献[16]提出了误差时变模型,首先假设位姿误差在短时间内是连续变化的,然后按时间间隔对点云进行分段,通过改进的ICP算法得到准确对应点对,建立轨迹误差随时间变化的模型,进而改正车辆轨迹的位姿;文献[17]根据车辆行驶的加速度和角速度获取对点云进行分段的关键点,之后利用点到面与点到点相结合的ICP算法进行分段点云的配准,再利用配准结果计算轨迹关键点的位姿,最后通过线性内插方法获得每个轨迹点改正后的位姿;文献[18]首先根据测量车的轨迹检测点云中的闭合环,然后用Generalized-ICP配准闭合环内的点云,最后基于闭合环的结果将全局配准转化为具有封闭形式解的最小二乘优化。
由以上分析可知,当前同向或往返不同时期MLS点云的配准存在以下问题:1)数据驱动的方法难以解决偏差较大的非刚性形变,满足刚性变换的范围难以确定,同名特征的选取要求较高,数据的质量对配准精度和效率影响较大;2)传感器驱动的方法需要使用轨迹信息,且需要基于一定的先验条件,存在控制点依赖等;3)数据驱动和传感器驱动的方法均使用基于ICP的精配准算法,未考虑点云初始位置对配准的影响。
目前主要采用数据驱动的方法对TLS与MLS不同平台的点云进行配准,但总体研究较少,尚未形成成熟的方法体系[19]。文献[20]和文献[21]首先根据TLS系统内置GPS获取TLS点云与MLS点云的对应区域,然后通过法线空间采样获取用于配准的点云,最后采用改进的遗传算法和ICP算法实现TLS点云与MLS点云的配准;该方法未考虑MLS点云数据中非刚性变化对配准结果的影响,并且效率不高。
针对目前方法中同名特征不易选取、配准精度低和速度慢的问题,本文提出了一种利用地理实体目标特征的道路场景激光点云配准方法。首先从道路场景点云数据的特点着手,设计了一种综合特征值和主曲率的多尺度关键点提取方法,以降低同名特征的选取难度;然后基于提取的关键点,利用4PCS算法进行粗配准,使待配准数据具有良好的初始位置;接着采用双向KD树改进的ICP算法进行精配准,在提高配准效率的同时克服了数据质量对配准精度的影响。
2 道路场景点云配准方法
本文提出了一种利用地理实体目标特征的道路场景激光点云配准方法,该方法主要包括车载点云分段、配准基元选取、多尺度关键点提取和渐进式配准等步骤。具体算法步骤如图1所示。

2.1 车载点云分段
MLS系统在行驶过程中通过组合导航进行直接地理定位,GNSS信号易被遮挡,导致GNSS定位误差、IMU定姿误差随测量时间不断变化,在点云数据中表现为非刚性变化规律,是点云位置精度误差的主要来源[22]。
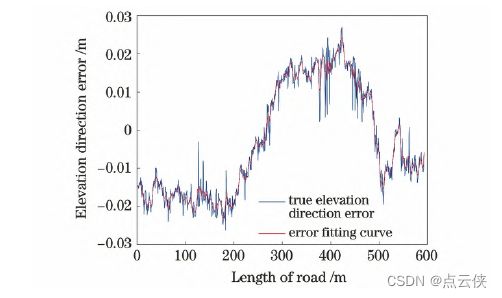
MLS点云数据量大,为便于数据处理和减弱非刚性误差对配准的影响,需要对点云进行分段。多次采集的点云之间存在相对平移误差,通过实际数据分析发现,误差在 高程方向的变化最为明显。因此,本文采用每一分段内高程方向误差差值 的最大偏差 来反映该分段内点云的非刚性变化程度,通过分析两期采集点云之间的 与道路长度的关系,结合道路场景的特点,以合适的阈值进行分段,使分段内的非刚性变化程度达到一定范围。 Δ δ \Delta\delta Δδ的计算公式为
Δ δ = Δ H m a x − Δ H m i n (1) \Delta\delta=\Delta H_{max}-\Delta H_{min}\tag{1} Δδ=ΔHmax−ΔHmin(1)
式中: Δ H m a x \Delta H_{max} ΔHmax和\Delta H_{min}分别为分段内高程方向误差差值 的最大值和最小值。
2.2 配准基元的选取
在道路场景中,路面点云特征不明显且所占比例较大,会影响配准的效率;动态变化的地理实体对象,如车辆、行人、植被等,无准确的对应关系,会影响配准的精度。道路的路口分布着信号灯、交通标示牌,此类地理实体不受行道树和低矮植被的影响,完整性较好;路缘石高出路面10~20 cm,有足够的埋置深度,除少量行人与车辆的遮挡外,路缘石数据基本完整;道路护栏和隔离带连续分布于道路中央及两侧,该类地理实体的完整性较好;照明灯等间距分布于道路两侧,受近地面低矮植被的影响,照明灯灯杆底部的完整性较差。
通过分析,选取路缘石、道路护栏、隔离带、照明灯的顶部、杆状物的远地面部分作为配准基元。保证在植被茂密,遮挡严重的情况下,仍然有路缘石或护栏使待配准的点云数据有足够的重叠区域。配准基元的选取方法如下:
对待配准点云数据中的低矮植被进行高程统计,以低矮植被的高程为阈值,采用直通滤波算法分割近地面点云和非近地面点云。对于近地面点云,采用文献[23]中的移动窗口判别法提取路缘石,交互提取道路护栏、隔离带;对于非近地面点云,采用基于杆圆弧特征[24]的方法提取杆状物。
2.3 多尺度关键点的提取
在配准基元中,路缘石呈条带状分布于道路两侧,除相邻路缘石之间存在缝隙角点之外,其他区域均为平面或立面,平面或立面上的点特征单一且数量大,影响配准的效率;不同扫描视角下杆状物点云的边缘点不同,边缘点影响配准的精度。因此,点云数据量大,配准基元中仍有大量冗余点是对配准无效的 ,能否准确提取分布均匀、特征明显而又具有代表性的关键点,对配准的效果有很大影响。
点云数据中任一点的特征值能够反映该点局部邻域的维度特性[25],特征值越大表示特征越明显。形状指数 能够反映该点的局部形状,曲面上任一局部表面形状指数的极大值代表凸点,极小值代表凹点。任一点 所在表面的形状指数 S ( p ) S(p) S(p)定义为

式中: k 1 k_1 k1、 k 2 k_2 k2 分别是主曲率的最大值和最小值; S ( p i ) S(p_i) S(pi)的取值范围为[0,1]。
不同地物地理实体 目标的结构不同,关键点的位置分布也不同。八叉树是一种管理三维点云的数据结构,通过递归的方式能够将离散分布的点划分入多个相同大小的立方体体素内,并且每个体素内至少会有一个点;以八叉树的最小体素作为一个计算单元进行特征点提取,能够确保特征点分布的均匀性。为此,本文提出了一种综合特征值和形状指数的多尺度关键点提取方法。首先根据点云的特征值属性提取配准基元中的局部曲面,并将其作为特征区域,以降低场景的复杂度;然后对特征区域构建八叉树体素索引,并在体素内根据点云的形状指数提取关键点。详细过程如下:
1)对于配准基元 中的每一个点 p i p_i pi ,以 p i p_i pi为中心、 r r r为搜索半径构建加权协方差矩阵,以提高边缘点和尖锐点计算的稳定性。

式中: p j p_j pj为 p i p_i pi局部邻域内所有的点; λ i a \lambda_{i}^a λia为协方差矩阵中的第 a a a个特征值; e i a e_{i}^a eia为 λ i a \lambda_{i}^a λia对应的特征向量。特征值从大到小排列为 λ i 1 、 λ i 2 、 λ i 3 \lambda_{i}^1、\lambda_{i}^2、\lambda_{i}^3 λi1、λi2、λi3 ,则 e i 3 e_{i}^3 ei3为 p i p_i pi点的法向量。当 λ i 1 ≈ λ i 2 ≈ λ i 3 \lambda_{i}^1\approx\lambda_{i}^2\approx\lambda_{i}^3 λi1≈λi2≈λi3时,可判断局部邻域为三维曲面。
2)设置阈值 ε 1 \varepsilon_1 ε1和 ε 2 \varepsilon_2 ε2 ,遍历配准基元中的每一个点,将满足式(5)的点归类为局部曲面。对局部曲面内的每一个点 p i i p_{ii} pii ,以 p i i p_{ii} pii为中心,建立半径为 r 2 ( r 2 > r 1 ) r_2(r_2>r_1) r2(r2>r1)的球邻域,如果 p i i p_{ii} pii点为该球邻域内最小特征值为最大值的点,则将 p i i p_{ii} pii点将邻域内最小特征值为最大值 的点记为特征区域 。

3)对特征区域于内的每一个点 X i i X_{ii} Xii,以 X i i X_{ii} Xii为中心点、 r 3 ( r 3 > r 2 ) r_3(r_3>r_2) r3(r3>r2)为半径,在配准基元中查找 X i i 的邻近点,根据邻近点的法向量计算 X_{ii}的邻近点,根据邻近点的法向量计算 Xii的邻近点,根据邻近点的法向量计算X_{ii}的主曲率[26]。计算配准基元、局部曲面、特征 区 域内点的属性及其对应搜索半径的影响区域,如图2所示。

4)根据道路的实际长度,对配准基元构构建体素分辨率为 r 0 ( r 0 > > r 3 ) r_0(r_0>>r_3) r0(r0>>r3)的八叉树体素索引,以确保关键点分布均匀。根据式(2)计算 X i i X_{ii} Xii点的形状指数,统计每个体素邻域内 X i i X_{ii} Xii点的个数 n X i i n_{X_{ii}} nXii ,如果 n X i i > 2 n_{X_{ii}}>2 nXii>2 ,则取形状指数为极值的点为关键点,如果 n X i i = 1 n_{X_{ii}}=1 nXii=1 ,则取该点为关键点。
基于此,提取的关键点分布均匀且均是沿法向量方向特征明显的点或局部邻域内的凹凸点。
2.4 渐进式配准
本文提出了一种关键点约束下4PCS与ICP算法结合的渐进式配准机制(Key4PCS-KeyICP算法)。具体实施策略如下:首先应用多尺度关键点提取算法对源点云 P P P和目标点云 Q Q Q的配准基元进行关键点提取;然后基于关键点集合 ( P k e y , Q k e y ) (P_{key},Q_{key}) (Pkey,Qkey)进行4PCS粗配准,当4PCS算法趋近于全局收敛时,用双向KD树改进的ICP算法完成 ( P k e y , Q k e y ) (P_{key},Q_{key}) (Pkey,Qkey)的配准;最后将变换矩阵作用于原始点云,完成原始点云数据的配准。
1)关键点约束的4PCS配准
关键点约束的4PCS算法:在一次迭代中,首先从源点云的关键点 P k e y P_{key} Pkey中随机选取3个不共线的点,再选取第4个点作为一组四点基(四点基称作 B B B ),这4个点在选取时要求距离足够远且位于待配准点云的重叠区域;然后根据仿射不变比构建一致性约束条件[8],在目标点云关键点 Q k e y Q_{key} Qkey中找到所有与 B B B近似全等的四点基集合 U = { U 1 , U 2 , . . . , } U= \{U_1,U_2,..., \} U={U1,U2,...,} ;最后对 U U U中的每一个四点基 U i U_i Ui ,根据对应四点基 计算刚性变换矩阵 T i T_i Ti ,通过最大公共点集(LCP)选取配准后 P k e y P_{key} Pkey 和 Q k e y Q_{key} Qkey 在距离 δ \delta δ范围内对应点对最多的一个变换作为此轮迭代的最佳变换矩阵 T i b e s t T_{ibest} Tibest ;迭代计算 L L L次,在LCP约束下找到 T i b e s t T_{ibest} Tibest中的最优结果,并将其作为全局最优变换参数 。
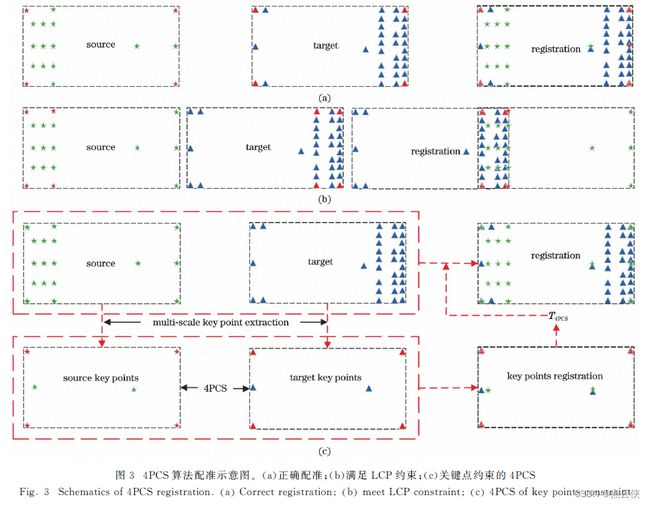
δ \delta δ是根据输入目标点云的平均距离计算得到的[9]。因此,当待配准点云存在空洞或密度分布不均,特别是直接使用TLS点云对MLS点云进行场景补充时,4PCS算法容易配准失败。如图3所示,图中黑色虚线框表示点云数据的范围,符号表示点云数据中的点,红色符号表示四点基。当对应四点基出现图3(a)所示的情况时,能够使点云配准成功,但是配准之后的点云并不满足LCP的要求,算法会继续迭代寻找全局最优解;当对应四点基出现图3(b)所示的情况时,满足LCP要求,但配准结果是不正确的。本文基于 ( P k e y , Q k e y ) (P_{key},Q_{key}) (Pkey,Qkey)进行4PCS粗配准,如图3©所示,关键点位于特征明显的区域,对应四点基出现图3(a)所示情况的概率较大,能够提高4PCS算法对应四点基的识别度和配准成功的概率,减少迭代次数;在进行LCP验证时只有关键点参与计算,关键点分布均匀能够避免原始点云数据空洞和密度不均对LCP的影响,从而保证既能正确配准又满足LCP约束。
2)关键点约束的改进ICP配准
ICP算法容易陷入局部最优,对点云的初始位置要求较高,最近邻点存在多对一的问题,因此,算法的精度和效率不高。本文采用关键点约束的4PCS进行粗配准,能够为ICP算法提供较好的初始位置。考虑到道路场景中存在的遮挡因素、扫描仪自身的限制以及点云数据的特点,粗配准后关键点集合的最近邻点对仍然存在多对一的问题。
为此,本文在关键点集合中构建KD树索引,采用双向K近邻搜索的方式剔除因地物扫描缺失而造成的错误最近邻匹配点对,然后再迭代计算,直到 的距离达到最小。将距离最小时对应的变换矩阵 和粗配准的变换矩阵 作用于源点云 完成原始点云的配准
双向K近邻的搜索时间虽然是K近邻搜索的两倍,但正确的匹配点对能够减少ICP算法种不必要的迭代计算,从而提高配准精度和效率。
3 实验与分析
3.1 实验数据
3.2 关键点提取结果
3.3 配准结果

4 结论
本文以多期、多平台城市道路激光点云数据为研究对象,通过分析道路场景激光点云的特点,提出了利用道路地理实体目标特征的点云配准方法。根据道路场景激光点云的特点,选取固定地理实体作为配准基元,消除动态变化因素对配准的影响;使用特征值和形状指数构建约束条件并结合八叉树均匀划分离散分布点的优势,提取配准基元中分布均匀而又不失代表性的关键点;针对点云空洞或密度不均对4PCS算法影响较大的问题,利用关键点分布均匀的特性,提高4PCS算法对应四点基的识别度和配准成功的概率;为避免点云缺失对ICP配准精度产生影响,采用双向K近邻搜索的方式剔除错误的匹配点对。最后,完成了道路场景多期车载激光点云以及车载与固定站激光点云的配准。可视化分析和定量评价结果表明,本文方法能较好地解决实际工程应用中城市道路场景多次采集的MLS点云位置不一致以及TLS与MLS点云数据配准难度大的问题。虽然本文方法能够有效完成城市道路场景点云的配准,但是在提高TLS与MLS点云数据的配准精度上还有待进一步改进。
5 参考文献
[1] 刘如飞,王飞,任红伟,王旻烨,杨继奔.一种利用地理实体目标特征的道路场景激光点云配准方法[J].中国激光,2022,49(18):127-139.