智能家居项目开发(二):项目架构建立
智能家具项目开发
- 一、智能家居项目框架设计
- 二、智能家居架构文件代码工程建立
- 三、浴室灯代码实现
- 四、火焰检测和蜂鸣器模块测试
- 五、添加语音模块的串口读取功能
- 六、添加socket服务器功能
- 七、主程序代码初步编写,实现语音和网络线程
一、智能家居项目框架设计
1.代码设计思路草图:

2.代码思路讲解:
a)一个指令工厂,一个控制工厂,实际上就是通过链表链起来的数据。具体怎么链接起来,就是基于简单工厂模式的类与对象的概念,上一篇文章有学习记录。
b)主函数语音指令程序和tcp指令程序各起一个线程,然后通过指令找到对应的控制程序,实现对应的模块的功能。
二、智能家居架构文件代码工程建立
有了思路之后,我们就可以来建立项目文件代码了。
1.我们先再桌面建立一个项目文件:
2.然后打开文件,逐个写好先:

3.然后打开Souce Insight,把文件都导入进去
因为用这个来写,更加的直观和方便。

三、浴室灯代码实现
1.先看主函数mainPro.c
#include2.外设设备的头文件controlDevices.h
#include3.浴室灯bathroomLight.c
#include"controlDevices.h"
int bathroomLightInit(int pinNum)
{
pinMode(pinNum,OUTPUT);
digitalWrite(pinNum,HIGH);
}
int bathroomLightOpen(int pinNum)
{
digitalWrite(pinNum,LOW);
}
int bathroomLightClose(int pinNum)
{
digitalWrite(pinNum,HIGH);
}
struct Devices bathroomLight = {
.deviceName = "bathroomLight",
.pinNum = 28,
.deviceInit = bathroomLightInit,
.open = bathroomLightOpen,
.close = bathroomLightClose
};
struct Devices *addBathroomLightInit(struct Devices *phead)
{
if(phead == NULL){
return &bathroomLight;
}else{
bathroomLight.next = phead;
phead = &bathroomLight;
}
}
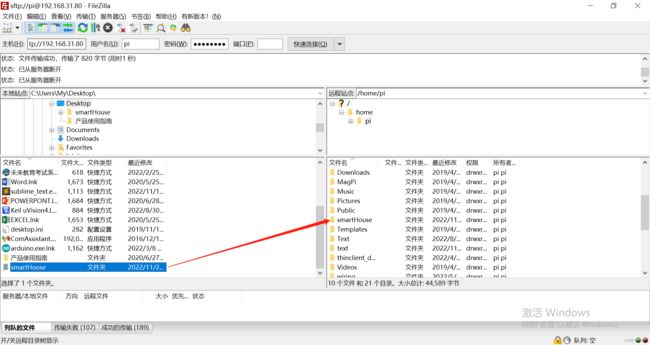
4.写完之后,利用FileZilla文件传输软件,将文件smartHouse文件传到树莓派终端:
5.进行代码编译,然后执行:

6.测试结果:

7.继电器其余四盏灯全部实现:
其余三盏灯的代码格式和上面bathroomLight.c的一样,这里就不一一展示,已经实现了。
等所有的模块都测试完,会有整个项目的实现效果和总结。
四、火焰检测和蜂鸣器模块测试
它们也是io口驱动,跟实现灯代码一样,就是要注意模块的使用说明。
1.火焰传感器fire.c
#include"controlDevices.h"
int fireInit(int pinNum)
{
pinMode(pinNum,INPUT);
digitalWrite(pinNum,HIGH);
}
int fireStatusRead(int pinNum)
{
return digitalRead(pinNum);
}
struct Devices fire = {
.deviceName = "fire",
.pinNum = 0,
.deviceInit = fireInit,
.readStatus = fireStatusRead
};
struct Devices *addFireToDevicesLink(struct Devices *phead)
{
if(phead == NULL){
return &fire;
}else{
fire.next = phead;
phead = &fire;
}
}
2.蜂鸣器buzzer.c
#include"controlDevices.h"
int buzzerInit(int pinNum)
{
pinMode(pinNum,OUTPUT);
digitalWrite(pinNum,HIGH);
}
int buzzerOpen(int pinNum)
{
digitalWrite(pinNum,LOW);
}
int buzzerClose(int pinNum)
{
digitalWrite(pinNum,HIGH);
}
struct Devices buzzer = {
.deviceName = "buzzer",
.pinNum = 7,
.deviceInit = buzzerInit,
.open = buzzerOpen,
.close = buzzerClose
};
struct Devices *addBuzzerToDevicesLink(struct Devices *phead)
{
if(phead == NULL){
return &buzzer;
}else{
buzzer.next = phead;
phead = &buzzer;
}
}
3.外设设备的头文件controlDevices.h
#include4.主函数测试代码mainPro.c
#include5.测试结果:
编译运行

运行结果

五、添加语音模块的串口读取功能
语音模块之前有学过,这里主要通过主控芯片树莓派的串口跟语音模块连接。
树莓派的T接语音模块的R
树莓派的R接语音模块的T
然后就是供电
我们先把语音模块的代码整合到指令链表链表当中去:
1.语音控制设备voicevoiceContrl.c
#include"inputCommand.h"
#include2.控制设备的头文件inputCommand.h
#include3.先运行测试一下:

代码没问题。
六、添加socket服务器功能
这里跟语音模块一样,我们先把socket服务器加到控制链表中去。
这里也基于语音模块代码来写。
1.socket服务器控制socketContrl.c
#include"inputCommand.h"
#include2.控制设备的头文件inputCommand.h
#include3.编译测试一下:

七、主程序代码初步编写,实现语音和网络线程
这里还是主要测试主函数。所有控制实现功能都是在主函数里面进行。
我们来测试一下socket服务器的网络功能和树莓派连接语音的串口功能
1.主函数mainPro.c
#include2.编译运行网络测试:
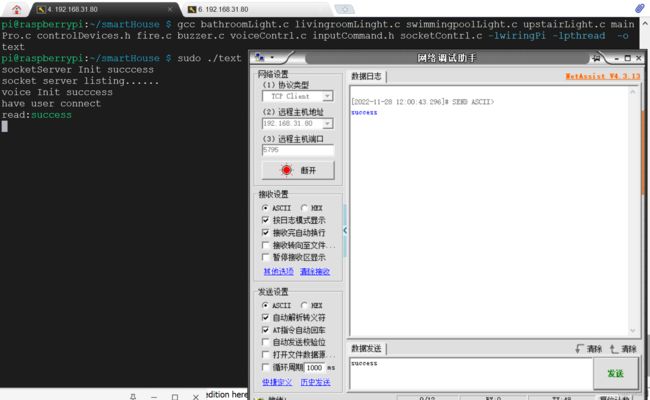
3.串口语音测试:
树莓派连接语音的串口功能。

测试的结果还不是特别完善,语音模块的口令那块源代码还要改下,然后收到串口的语音指令完善下。