机器人基础--雅克比矩阵
1.雅克比矩阵的理论部分
2.机器人逆运动学
材料来源于:https://www.cnblogs.com/21207-iHome/p/5948659.html
引用请备注上材料的来源者:https://www.cnblogs.com/21207-iHome/p/5948659.html
2.1机器人运动学公式
参考挖掘机VOLVO walker excavator:

机器人末端有4个自由度x,y,z和shovel的翻斗, P x , P y , P z , θ s h o v e l P_x,P_y,P_z,\theta_{shovel} Px,Py,Pz,θshovel;
关节有5个自由度 ψ , θ 1 , θ 2 , x t e l e , θ 3 \psi,\theta_1,\theta_2,x_{tele},\theta_3 ψ,θ1,θ2,xtele,θ3;
[ P x P y P z θ s h o v e l ] = [ f 1 ( ψ , θ 1 , θ 2 , x t e l e , θ 3 ) f 2 ( ψ , θ 1 , θ 2 , x t e l e , θ 3 ) f 3 ( ψ , θ 1 , θ 2 , x t e l e , θ 3 ) f 4 ( ψ , θ 1 , θ 2 , x t e l e , θ 3 ) ] \left[\begin{matrix}P_x\\P_y\\P_z\\ \theta_{shovel} \end{matrix} \right]= \left[\begin{matrix}f_1(\psi,\theta_1,\theta_2,x_{tele},\theta_3) \\ f_2(\psi,\theta_1,\theta_2,x_{tele},\theta_3) \\ f_3(\psi,\theta_1,\theta_2,x_{tele},\theta_3) \\ f_4(\psi,\theta_1,\theta_2,x_{tele},\theta_3) \end{matrix}\right] ⎣⎢⎢⎡PxPyPzθshovel⎦⎥⎥⎤=⎣⎢⎢⎡f1(ψ,θ1,θ2,xtele,θ3)f2(ψ,θ1,θ2,xtele,θ3)f3(ψ,θ1,θ2,xtele,θ3)f4(ψ,θ1,θ2,xtele,θ3)⎦⎥⎥⎤
对上述公式进行微分:
[ δ P x δ P y δ P z δ θ s h o v e l ] = [ δ f 1 ψ ψ + δ f 1 θ 1 θ 1 + δ f 1 θ 2 θ 2 + δ f 1 x t e l e x t e l e + δ f 1 θ 3 θ 3 δ f 2 ψ ψ + δ f 2 θ 1 θ 1 + δ f 2 θ 2 θ 2 + δ f 2 x t e l e x t e l e + δ f 2 θ 3 θ 3 δ f 3 ψ ψ + δ f 3 θ 1 θ 1 + δ f 3 θ 2 θ 2 + δ f 3 x t e l e x t e l e + δ f 3 θ 3 θ 3 δ f 4 ψ ψ + δ f 4 θ 1 θ 1 + δ f 4 θ 2 θ 2 + δ f 4 x t e l e x t e l e + δ f 4 θ 3 θ 3 ] \left[\begin{matrix}\delta P_x\\ \delta P_y\\ \delta P_z\\ \delta \theta_{shovel} \end{matrix} \right]= \left[\begin{matrix} \delta \frac{f_1}{\psi}\psi+\delta \frac{f_1}{\theta_1}\theta_1 + \delta \frac{f_1}{\theta_2}\theta_2 + \delta \frac{f_1}{x_{tele}}x_{tele} + \delta \frac{f_1}{\theta_3}\theta_3\\ \delta \frac{f_2}{\psi}\psi+\delta \frac{f_2}{\theta_1}\theta_1 + \delta \frac{f_2}{\theta_2}\theta_2 + \delta \frac{f_2}{x_{tele}}x_{tele} + \delta \frac{f_2}{\theta_3}\theta_3 \\ \delta \frac{f_3}{\psi}\psi+\delta \frac{f_3}{\theta_1}\theta_1 + \delta \frac{f_3}{\theta_2}\theta_2 + \delta \frac{f_3}{x_{tele}}x_{tele} + \delta \frac{f_3}{\theta_3}\theta_3 \\ \delta \frac{f_4}{\psi}\psi+\delta \frac{f_4}{\theta_1}\theta_1 + \delta \frac{f_4}{\theta_2}\theta_2 + \delta \frac{f_4}{x_{tele}}x_{tele} + \delta \frac{f_4}{\theta_3}\theta_3 \end{matrix}\right] ⎣⎢⎢⎡δPxδPyδPzδθshovel⎦⎥⎥⎤=⎣⎢⎢⎢⎡δψf1ψ+δθ1f1θ1+δθ2f1θ2+δxtelef1xtele+δθ3f1θ3δψf2ψ+δθ1f2θ1+δθ2f2θ2+δxtelef2xtele+δθ3f2θ3δψf3ψ+δθ1f3θ1+δθ2f3θ2+δxtelef3xtele+δθ3f3θ3δψf4ψ+δθ1f4θ1+δθ2f4θ2+δxtelef4xtele+δθ3f4θ3⎦⎥⎥⎥⎤
通用化表示为:
Y ˙ = J ( X ) X ˙ \dot{Y}=J(X)\dot{X} Y˙=J(X)X˙
J(X)是时变转换矩阵,这个公式描述关节(actuator,自变量)变化对系统(末端,因变量)的影响
2.2雅克比矩阵的求解
公式比较复杂,如果展开计算,非常要命,尤其是在5,6个自由度的工业机器人上。
雅克比矩阵可以表达成:
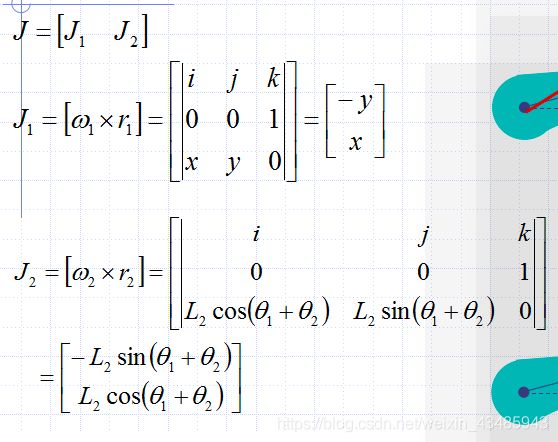
Y ˙ = [ J 1 J 2 J 3 J 4 J 5 ] X ˙ \dot{Y}=\left[\begin{matrix}J_1 & J_2 & J_3 & J_4 & J_5 \end{matrix}\right]\dot{X} Y˙=[J1J2J3J4J5]X˙
J i J_i Ji是驱动关节i运动对末端的影响
e.g. 一个二自由度的平面连杆机器人

分析:末端只有x,y两个自由度,如果关节L1角度发生变化,那么末端的位置变化为:
Y ˙ = w 1 ∗ ( s e → − s 1 → ) \dot{Y} = w_1* (\stackrel{\rightarrow}{s_e}-\stackrel{\rightarrow}{s_1}) Y˙=w1∗(se→−s1→)
2.3 DH方程的jacobian矩阵的求解
如果是平面连杆机械臂,用上面2.2节就可以很方便的求出来。对于空间的连杆机械臂,如果是用标准DH方程建立的,jacobain矩阵为: