手搓GPT系列之 - 通过理解LSTM的反向传播过程,理解LSTM解决梯度消失的原理 - 逐条解释LSTM创始论文全部推导公式,配超多图帮助理解(下篇)
本文承接上篇上篇在此和中篇中篇在此,继续就Sepp Hochreiter 1997年的开山大作 Long Short-term Memory 中APPENDIX A.1和A.2所载的数学推导过程进行详细解读。希望可以帮助大家理解了这个推导过程,进而能顺利理解为什么那几个门的设置可以解决RNN里的梯度消失和梯度爆炸的问题。中篇介绍了各个权重的误差更新算法。本篇将继续说明梯度信息在LSTM的记忆单元中经过一定的时间步之后如何变化,并由此证明LSTM可实现CEC(Constant Error Carousel)。本篇为整个文章的终章,也是最关键的一篇,因为此篇正是理解LSTM实现CEC的关键。一家之言,若有任何错漏欢迎大家评论区指正。好了,Dig in!
6. 误差流
我们将计算误差值在记忆单元上流过 q q q时间步之后(也称误差流error flow)的变化情况。
6.1 记忆单元输出点的误差值计算
已知记忆单元的计算公式:
s c j ( t ) = s c j ( t − 1 ) + g ( n e t c j ( t ) ) y i n j ( t ) s_{c_j}(t) = s_{c_j}(t-1) + g(net_{c_j}(t)) y^{in_j}(t) scj(t)=scj(t−1)+g(netcj(t))yinj(t)
我们使用截断求导规则来计算误差在时间步 t − k t-k t−k和 t − k − 1 t-k-1 t−k−1之间的变化情况:
∂ s c j ( t − k ) ∂ s c j ( t − k − 1 ) = 1 + ∂ g ( n e t c j ( t − k ) ) y i n j ( t − k ) ∂ s c j ( t − k − 1 ) = 1 + ∂ y i n j ( t − k ) ∂ s c j ( t − k − 1 ) g ( n e t c j ( t − k ) ) + ∂ g ( n e t c j ( t − k ) ) ∂ s c j ( t − k − 1 ) y i n j ( t − k ) = 1 + ∑ u [ ∂ y i n j ( t − k ) ∂ y u ( t − k − 1 ) ∂ y u ( t − k − 1 ) ∂ s c j ( t − k − 1 ) ] g ( n e t c j ( t − k ) ) + y i n j ( t − k ) g ′ ( n e t c j ( t − k ) ) ∑ u [ ∂ n e t c j ( t − k ) ∂ y u ( t − k − 1 ) ∂ y u ( t − k − 1 ) ∂ s c j ( t − k − 1 ) ] ≈ t r 1. (30) \begin{aligned} \frac{\partial s_{c_j}(t-k)}{\partial s_{c_j}(t-k-1)} &= 1 + \frac{\partial g(net_{c_j}(t-k))y^{in_j}(t-k)}{\partial s_{c_j}(t-k-1)}\\ &=1+ \frac{\partial y^{in_j}(t-k)}{\partial s_{c_j}(t-k-1)}g(net_{c_j}(t-k)) + \frac{\partial g(net_{c_j}(t-k))}{\partial s_{c_j}(t-k-1)}y^{in_j}(t-k)\\ &=1 + \sum_u[\frac{\partial y^{in_j}(t-k)}{\partial y^u(t-k-1)}\frac{\partial y^u(t-k-1)}{\partial s_{c_j}(t-k-1)}]g(net_{c_j}(t-k)) \\ &\quad + y^{in_j}(t-k)g'(net_{c_j}(t-k))\sum_u [\frac{\partial net_{c_j}(t-k)}{\partial y^u(t-k-1)}\frac{\partial y^u(t-k-1)}{\partial s_{c_j}(t-k-1)}]\\ &\approx_{tr} 1.\tag{30} \end{aligned} ∂scj(t−k−1)∂scj(t−k)=1+∂scj(t−k−1)∂g(netcj(t−k))yinj(t−k)=1+∂scj(t−k−1)∂yinj(t−k)g(netcj(t−k))+∂scj(t−k−1)∂g(netcj(t−k))yinj(t−k)=1+u∑[∂yu(t−k−1)∂yinj(t−k)∂scj(t−k−1)∂yu(t−k−1)]g(netcj(t−k))+yinj(t−k)g′(netcj(t−k))u∑[∂yu(t−k−1)∂netcj(t−k)∂scj(t−k−1)∂yu(t−k−1)]≈tr1.(30)
根据截断求导的规则,上式中的 ∂ y i n j ( t − k ) ∂ y u ( t − k − 1 ) \frac{\partial y^{in_j}(t-k)}{\partial y^u(t-k-1)} ∂yu(t−k−1)∂yinj(t−k)和 ∂ n e t c j ( t − k ) ∂ y u ( t − k − 1 ) \frac{\partial net_{c_j}(t-k)}{\partial y^u(t-k-1)} ∂yu(t−k−1)∂netcj(t−k)都等于0。因此上式应用截断求导规则之后,最终结果等于1。上边这个式子有两个累加符号 ∑ u \sum_u ∑u可能会让人感到迷惑,按照我们一般的理解,应用链式求导规则,
∂ y i n j ( t − k ) ∂ s c j ( t − k − 1 ) = ∂ y i n j ( t − k ) ∂ y u ( t − k − 1 ) ∂ y u ( t − k − 1 ) ∂ s c j ( t − k − 1 ) , \frac{\partial y^{in_j}(t-k)}{\partial s_{c_j}(t-k-1)}=\frac{\partial y^{in_j}(t-k)}{\partial y^u(t-k-1)}\frac{\partial y^u(t-k-1)}{\partial s_{c_j}(t-k-1)}, ∂scj(t−k−1)∂yinj(t−k)=∂yu(t−k−1)∂yinj(t−k)∂scj(t−k−1)∂yu(t−k−1),为什么这里是
∂ y i n j ( t − k ) ∂ s c j ( t − k − 1 ) = ∑ u [ ∂ y i n j ( t − k ) ∂ y u ( t − k − 1 ) ∂ y u ( t − k − 1 ) ∂ s c j ( t − k − 1 ) ] . \frac{\partial y^{in_j}(t-k)}{\partial s_{c_j}(t-k-1)}=\sum_u[\frac{\partial y^{in_j}(t-k)}{\partial y^u(t-k-1)}\frac{\partial y^u(t-k-1)}{\partial s_{c_j}(t-k-1)}]. ∂scj(t−k−1)∂yinj(t−k)=u∑[∂yu(t−k−1)∂yinj(t−k)∂scj(t−k−1)∂yu(t−k−1)].
为了解释这个情况,我们需要先看一下下边从 y i n j ( t − k ) y^{in_j}(t-k) yinj(t−k)到 s c j ( t − k − 1 ) s_{c_j}(t-k-1) scj(t−k−1)的误差传播路径示意图:

我们把传播路径上的各个节点展开一下(如下图所示),这里边 y i n j ( t − k ) y^{in_j}(t-k) yinj(t−k)和 s c j ( t − k − 1 ) s_{c_j}(t-k-1) scj(t−k−1)所属的向量长度是一样的, y u ( t − k − 1 ) y^u(t-k-1) yu(t−k−1)所属向量的长度与其他两个不同。
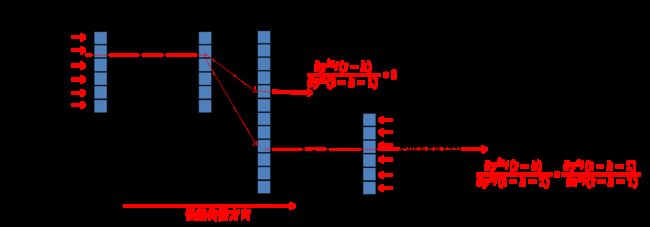
上图分别显示了 ∂ y i n j ( t − k ) ∂ y u ( t − k − 1 ) \frac{\partial y^{in_j}(t-k)}{\partial y^u(t-k-1)} ∂yu(t−k−1)∂yinj(t−k)及 ∂ y u ( t − k − 1 ) ∂ s c j ( t − k − 1 ) \frac{\partial y^u(t-k-1)}{\partial s_{c_j}(t-k-1)} ∂scj(t−k−1)∂yu(t−k−1)的现实含义。从上图可以看出,在给定 c j c_j cj和 i n j in_j inj值的情况下,由于大部分的 y u ( t − k − 1 ) y^u(t-k-1) yu(t−k−1)的单元和 s c j s_{c_j} scj节点连接。因此当且仅当 u = c j u=c_j u=cj时, ∂ y i n j ( t − k ) ∂ y u ( t − k − 1 ) ∂ y u ( t − k − 1 ) ∂ s c j ( t − k − 1 ) ≠ 0 \frac{\partial y^{in_j}(t-k)}{\partial y^u(t-k-1)}\frac{\partial y^u(t-k-1)}{\partial s_{c_j}(t-k-1)} \ne 0 ∂yu(t−k−1)∂yinj(t−k)∂scj(t−k−1)∂yu(t−k−1)=0。所以我们有:
∑ u [ ∂ y i n j ( t − k ) ∂ y u ( t − k − 1 ) ∂ y u ( t − k − 1 ) ∂ s c j ( t − k − 1 ) ] = ∂ y i n j ( t − k ) ∂ y c j ( t − k − 1 ) ∂ y c j ( t − k − 1 ) ∂ s c j ( t − k − 1 ) \sum_u[\frac{\partial y^{in_j}(t-k)}{\partial y^u(t-k-1)}\frac{\partial y^u(t-k-1)}{\partial s_{c_j}(t-k-1)}]= \frac{\partial y^{in_j}(t-k)}{\partial y^{c_j}(t-k-1)}\frac{\partial y^{c_j}(t-k-1)}{\partial s_{c_j}(t-k-1)} u∑[∂yu(t−k−1)∂yinj(t−k)∂scj(t−k−1)∂yu(t−k−1)]=∂ycj(t−k−1)∂yinj(t−k)∂scj(t−k−1)∂ycj(t−k−1)
同理可得:
∑ u [ ∂ n e t c j ( t − k ) ∂ y u ( t − k − 1 ) ∂ y u ( t − k − 1 ) ∂ s c j ( t − k − 1 ) ] = ∂ n e t c j ( t − k ) ∂ y c j ( t − k − 1 ) ∂ y c j ( t − k − 1 ) ∂ s c j ( t − k − 1 ) \sum_u [\frac{\partial net_{c_j}(t-k)}{\partial y^u(t-k-1)}\frac{\partial y^u(t-k-1)}{\partial s_{c_j}(t-k-1)}]=\frac{\partial net_{c_j}(t-k)}{\partial y^{c_j}(t-k-1)}\frac{\partial y^{c_j}(t-k-1)}{\partial s_{c_j}(t-k-1)} u∑[∂yu(t−k−1)∂netcj(t−k)∂scj(t−k−1)∂yu(t−k−1)]=∂ycj(t−k−1)∂netcj(t−k)∂scj(t−k−1)∂ycj(t−k−1)
我们用 v j ( t ) v_j(t) vj(t)表示 t t t时刻从记忆单元输出点的误差信号, v i ( t ) v_i(t) vi(t)表示隐藏单元的误差信号, v k ( t ) v_k(t) vk(t)表示输出单元的误差信号。如下图所示:
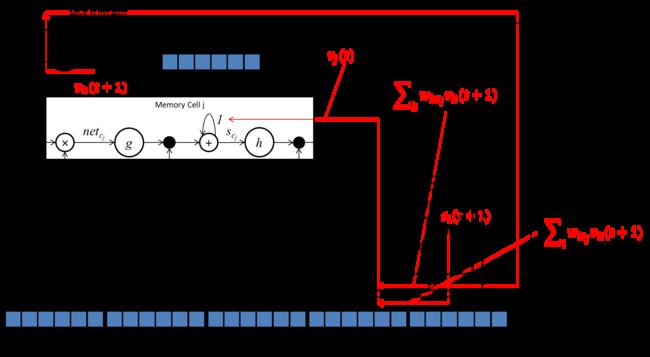
我们可以如此定义 v j ( t ) v_j(t) vj(t):
v j ( t ) : = ∑ k w k c j v k ( t + 1 ) + ∑ i w i c j v i ( t + 1 ) v_j(t):=\sum_kw_{kc_j}v_k(t+1) + \sum_iw_{ic_j}v_i(t+1) vj(t):=k∑wkcjvk(t+1)+i∑wicjvi(t+1)
原文中采用了一种更加通用的表达方式,即使用 i : i n o g a t e a n d n o m e m o r y c e l l i:\ i\ no\ gate\ and\ no\ memory\ cell i: i no gate and no memory cell同时代表上式中的 k , i k,i k,i。我们可以将上式改写为原文中的形式:
v j ( t ) : = ∑ i : i n o g a t e a n d n o m e m o r y c e l l w i c j v i ( t + 1 ) . (31) v_j(t):=\sum_{i:\ i\ no\ gate\ and\ no\ memory\ cell}w_{ic_j}v_i(t+1)\tag{31}. vj(t):=i: i no gate and no memory cell∑wicjvi(t+1).(31)
由于这个表示会跟隐藏单元误差信号的标识冲突,所以我们把式31重新写成:
v j ( t ) : = ∑ u : u n o g a t e a n d n o m e m o r y c e l l w u c j v u ( t + 1 ) . (31*) v_j(t):=\sum_{u:\ u\ no\ gate\ and\ no\ memory\ cell}w_{uc_j}v_u(t+1).\tag{31*} vj(t):=u: u no gate and no memory cell∑wucjvu(t+1).(31*)
6.2 输出门的误差值计算
此时我们可以计算 t t t时刻,输出门得到的误差值 v o u t j ( t ) v_{out_j}(t) voutj(t),该误差值的设定为处于 n e t o u t j net_{out_j} netoutj处,如下图所示:

v o u t j ( t ) ≈ t r ∂ y c j ( t ) ∂ n e t o u t j ( t ) v j ( t ) ≈ t r ∂ y c j ( t ) ∂ y o u t j ( t ) ∂ y o u t j ( t ) ∂ n e t o u t j ( t ) v j ( t ) . (32) \begin{aligned} v_{out_j}(t) &\approx_{tr} \frac{\partial y^{c_j(t)}}{\partial net_{out_j}(t)}v_j(t)\\ &\approx_{tr}\frac{\partial y^{c_j(t)}}{\partial y^{out_j}(t)} \frac{\partial y^{out_j}(t)}{\partial net_{out_j}(t)}v_j(t)\tag{32}. \end{aligned} voutj(t)≈tr∂netoutj(t)∂ycj(t)vj(t)≈tr∂youtj(t)∂ycj(t)∂netoutj(t)∂youtj(t)vj(t).(32)
6.3 CEC的误差值计算
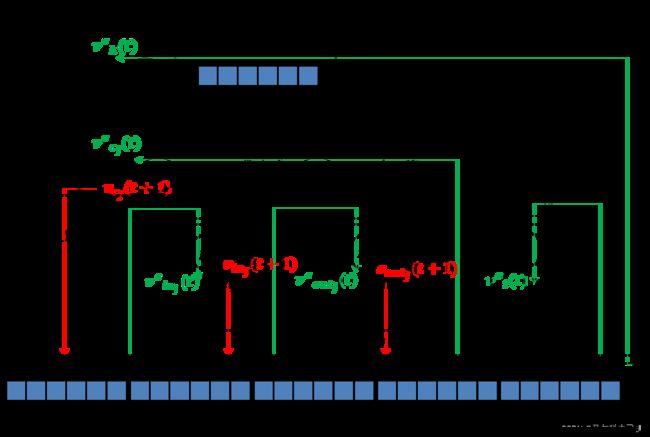
我们现在来计算在 t t t时刻传播到记忆单元内部的 s c j s_{c_j} scj处的误差值。误差值传播路径示意图:
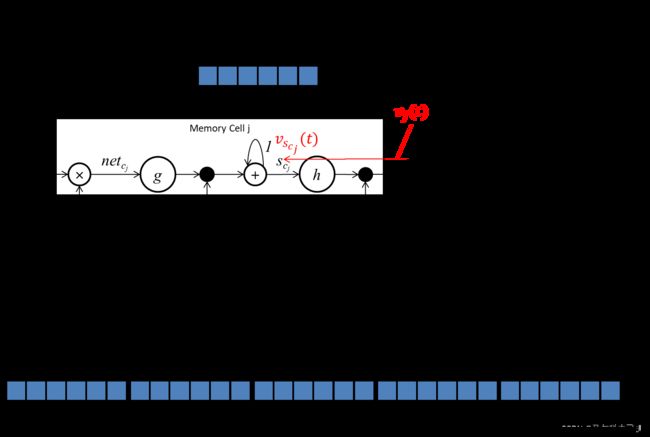
为了便于理解,我们把上边这个传播路径按时间顺序展开一下:

从上图我们可以明显地看出来,因为 s c j ( t ) s_{c_j}(t) scj(t)同时作为两个分支的输入,因此 v s c j ( t ) v_{s_{c_j}}(t) vscj(t)等于两个分支传过来的误差值之和:
v s c j ( t ) = ∂ s c j ( t + 1 ) ∂ s c j ( t ) v s c j ( t + 1 ) + ∂ y c j ( t ) ∂ s c j ( t ) v j ( t ) . (33) v_{s_{c_j}}(t) = \frac{\partial s_{c_j}(t+1)}{\partial s_{c_j}(t)}v_{s_{c_j}}(t+1) + \frac{\partial y^{c_j}(t)}{\partial s_{c_j}(t)}v_j(t)\tag{33}. vscj(t)=∂scj(t)∂scj(t+1)vscj(t+1)+∂scj(t)∂ycj(t)vj(t).(33)
6.4 CEC之间的误差流
接下来算一个中间公式,后边有用:
∂ v j ( t ) ∂ v s c j ( t + 1 ) = ∂ ∑ u w i c j v i ( t + 1 ) ∂ v s c j ( t + 1 ) ( 代入式 31 ∗ ) = ∑ u w u c j ∂ v u ( t + 1 ) ∂ v s c j ( t + 1 ) = 0. (34) \begin{aligned} \frac{\partial v_j(t)}{\partial v_{s_{c_j}}(t+1)}&= \frac{\partial \sum_u w_{ic_j}v_i(t+1)}{\partial v_{s_{c_j}}(t+1)}&(代入式31*)\\ &=\sum_u w_{uc_j}\frac{\partial v_u(t+1)}{\partial v_{s_{c_j}}(t+1)}\\ &=0\tag{34}. \end{aligned} ∂vscj(t+1)∂vj(t)=∂vscj(t+1)∂∑uwicjvi(t+1)=u∑wucj∂vscj(t+1)∂vu(t+1)=0.(代入式31∗)(34)
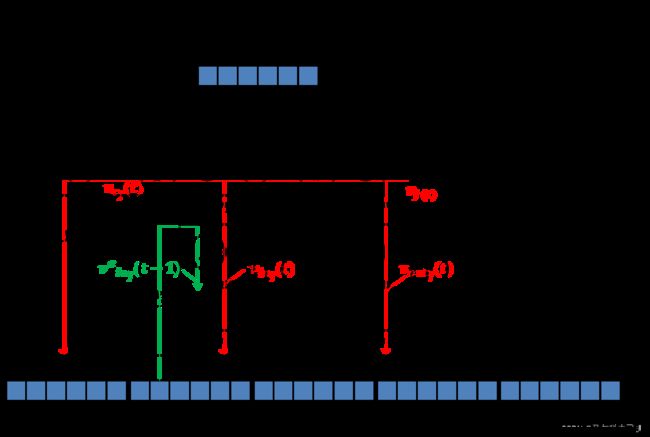
为什么 ∑ u w u c j ∂ v u ( t + 1 ) ∂ v s c j ( t + 1 ) = 0 \sum_u w_{uc_j}\frac{\partial v_u(t+1)}{\partial v_{s_{c_j}}(t+1)}=0 ∑uwucj∂vscj(t+1)∂vu(t+1)=0呢?我们用 v y u ( t ) v_{y^u}(t) vyu(t)来表示 t t t时刻传导到 y u y^u yu处的误差值,我们把LSTM模型按时间展开一下:
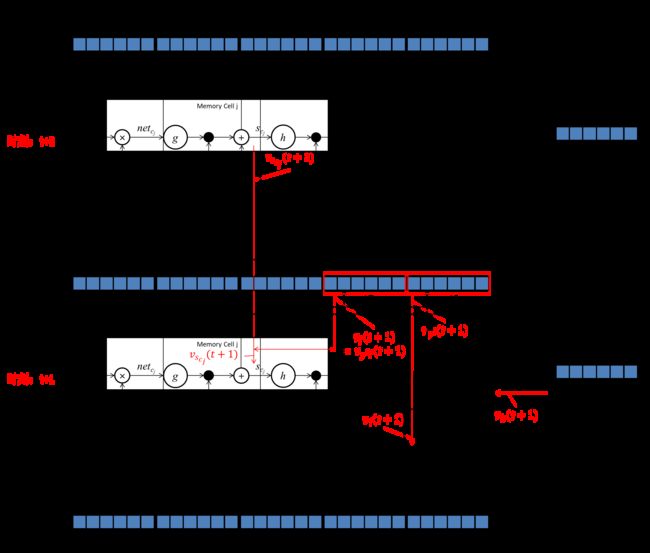
由于:
∑ u : u n o g a t e n o m e m o r y c e l l w u c j v u ( t + 1 ) = ∑ i w i c j v i ( t + 1 ) + ∑ k w k c j v i ( t + 1 ) \sum_{u:\ u\ no\ gate\ no\ memory\ cell} w_{uc_j}v_u(t+1)=\sum_{i} w_{ic_j}v_i(t+1) + \sum_{k} w_{kc_j}v_i(t+1) u: u no gate no memory cell∑wucjvu(t+1)=i∑wicjvi(t+1)+k∑wkcjvi(t+1)
可得:
∑ u w u c j ∂ v u ( t + 1 ) ∂ v s c j ( t + 1 ) = ∑ i w i c j ∂ v i ( t + 1 ) ∂ v s c j ( t + 1 ) + ∑ k w k c j ∂ v k ( t + 1 ) ∂ v s c j ( t + 1 ) \sum_u w_{uc_j}\frac{\partial v_u(t+1)}{\partial v_{s_{c_j}}(t+1)}=\sum_{i}\frac{w_{ic_j}\partial v_i(t+1)}{\partial v_{s_{c_j}}(t+1)} + \sum_{k} \frac{w_{kc_j}\partial v_k(t+1)}{\partial v_{s_{c_j}}(t+1)} u∑wucj∂vscj(t+1)∂vu(t+1)=i∑∂vscj(t+1)wicj∂vi(t+1)+k∑∂vscj(t+1)wkcj∂vk(t+1)
通过上图,我们容易看出, v i ( t + 1 ) v_i(t+1) vi(t+1)与 v s c j ( t + 1 ) v_{s_{c_j}}(t+1) vscj(t+1)互相独立,且 v k ( t + 1 ) v_k(t+1) vk(t+1)与 v s c j ( t + 1 ) v_{s_{c_j}}(t+1) vscj(t+1)互相独立,因此 w i c j ∂ v i ( t + 1 ) ∂ v s c j ( t + 1 ) = 0 , ∀ i \frac{w_{ic_j}\partial v_i(t+1)}{\partial v_{s_{c_j}}(t+1)}=0, \forall i ∂vscj(t+1)wicj∂vi(t+1)=0,∀i,且 w k c j ∂ v k ( t + 1 ) ∂ v s c j ( t + 1 ) = 0 , ∀ k \frac{w_{kc_j}\partial v_k(t+1)}{\partial v_{s_{c_j}}(t+1)}=0, \forall k ∂vscj(t+1)wkcj∂vk(t+1)=0,∀k。所以式子34得证。
此时我们来计算时刻 t + 1 t+1 t+1流入 s c j s_{c_j} scj的误差值对 t t t时刻,流入 s c j s_{c_j} scj的误差值的影响:
∂ v s c j ( t ) ∂ v s c j ( t + 1 ) = ∂ s c j ( t + 1 ) ∂ s c j ( t ) ∂ v s c j ( t + 1 ) ∂ v s c j ( t + 1 ) + ∂ y c j ( t ) ∂ s c j ( t ) ∂ v j ( t ) ∂ v s c j ( t + 1 ) (代入式 33 ) = ∂ s c j ( t + 1 ) ∂ s c j ( t ) (代入式 34 ) ≈ t r 1 (代入式 30 ) . (35) \begin{aligned} \frac{\partial v_{s_{c_j}}(t)}{\partial v_{s_{c_j}}(t+1)} &= \frac{\frac{\partial s_{c_j}(t+1)}{\partial s_{c_j}(t)}\partial v_{s_{c_j}}(t+1)}{\partial v_{s_{c_j}}(t+1)} + \frac{\frac{\partial y^{c_j}(t)}{\partial s_{c_j}(t)}\partial v_j(t)}{\partial v_{s_{c_j}}(t+1)}&(代入式33)\\ &=\frac{\partial s_{c_j}(t+1)}{\partial s_{c_j}(t)}& (代入式34)\\ &\approx_{tr}1&(代入式30)\tag{35}. \end{aligned} ∂vscj(t+1)∂vscj(t)=∂vscj(t+1)∂scj(t)∂scj(t+1)∂vscj(t+1)+∂vscj(t+1)∂scj(t)∂ycj(t)∂vj(t)=∂scj(t)∂scj(t+1)≈tr1(代入式33)(代入式34)(代入式30).(35)
式35意味着:
v s c j ( t ) = v s c j ( t + 1 ) + C . v_{s_{c_j}}(t) = v_{s_{c_j}}(t+1) + C. vscj(t)=vscj(t+1)+C.
记忆单元内部的误差值是恒定的,或者说, t + 1 t+1 t+1时刻,流到 v s c j v_{s_{c_j}} vscj的误差值是多少,再往上流到 t t t时刻的 v s c j v_{s_{c_j}} vscj那里,就还是多少。(这是最理想的情况,我们这个模型还有一个 C C C)。
6.5 记忆单元的误差值计算
记忆单元输入处的误差值 v c j ( t ) v_{c_j}(t) vcj(t)为:
v c j ( t ) = ∂ g ( n e t c j ( t ) ) ∂ n e t c j ( t ) ∂ s c j ( t ) ∂ g ( n e t c j ( t ) ) v s c j ( t ) . (36) v_{c_j}(t)=\frac{\partial g(net_{c_j}(t))}{\partial net_{c_j}(t)}\frac{\partial s_{c_j}(t)}{\partial g(net_{c_j}(t))}v_{s_{c_j}}(t)\tag{36}. vcj(t)=∂netcj(t)∂g(netcj(t))∂g(netcj(t))∂scj(t)vscj(t).(36)
这个公式太简单了,不需要再进一步解释。我们放个误差流的示意图用以说明上式所说的标记的位置:

6.6 输入门的误差值计算
v i n j ( t ) ≈ t r ∂ y i n j ( t ) ∂ n e t i n j ( t ) ∂ s c j ( t ) ∂ y i n j ( t ) v s c j ( t ) . (37) v_{in_j}(t)\approx_{tr}\frac{\partial y^{in_j}(t)}{\partial net_{in_j}(t)}\frac{\partial s_{c_j}(t)}{\partial y_{in_j}(t)}v_{s_{c_j}}(t)\tag{37}. vinj(t)≈tr∂netinj(t)∂yinj(t)∂yinj(t)∂scj(t)vscj(t).(37)
误差值传播示意图:

6.7 外部误差流的计算
在 t + 1 t+1 t+1时刻,各个门或记忆单元(记为 l l l)的误差值 v l ( t + 1 ) v_l(t+1) vl(t+1),沿着 w l v w_{lv} wlv传播到上一个时间时刻 t t t的某一个记忆单元、门、输出单元或者隐藏单元(记为 v v v)中去,这就叫外部误差流(external error flow),我们计算一下任何节点 v v v在 t t t时刻收到的外部误差值(记为 v v e ( t ) v_v^e(t) vve(t)):
v v e ( t ) = ∂ y v ( t ) ∂ n e t v ( t ) ∑ l ∂ n e t l ( t + 1 ) ∂ y v ( t ) v l ( t + 1 ) = ∂ y v ( t ) ∂ n e t v ( t ) ( ∂ n e t o u t j ( t + 1 ) ∂ y v ( t ) v o u t j ( t + 1 ) + ∂ n e t i n j ( t + 1 ) ∂ y v ( t ) v i n j ( t + 1 ) + ∂ n e t c j ( t + 1 ) ∂ y v ( t ) (38) \begin{aligned} v_v^e(t) &= \frac{\partial y^v(t)}{\partial net_v(t)}\sum_l \frac{\partial net_l(t+1)}{\partial y^v(t)}v_l(t+1)\tag{38}\\ &= \frac{\partial y^v(t)}{\partial net_v(t)}( \frac{\partial net_{out_j}(t+1)}{\partial y^v(t)}v_{out_j}(t+1)+ \frac{\partial net_{in_j}(t+1)}{\partial y^v(t)}v_{in_j}(t+1) + \frac{\partial net_{c_j}(t+1)}{\partial y^v(t)} \end{aligned} vve(t)=∂netv(t)∂yv(t)l∑∂yv(t)∂netl(t+1)vl(t+1)=∂netv(t)∂yv(t)(∂yv(t)∂netoutj(t+1)voutj(t+1)+∂yv(t)∂netinj(t+1)vinj(t+1)+∂yv(t)∂netcj(t+1)(38)
可以通过下图理解外部误差的传播路径:
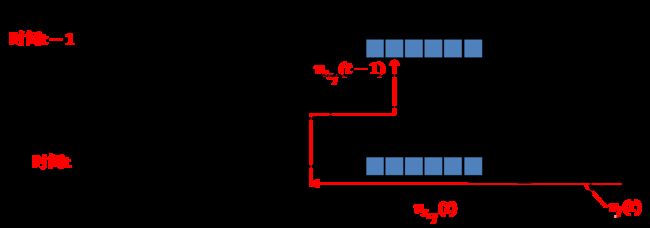
此时我们可以得到外部误差与记忆单元 v v e ( t − 1 ) v_v^e(t-1) vve(t−1)与 v j ( t ) v_j(t) vj(t)的关系,先看下边的传播路径示意图理解一下这个公式想计算的是什么东西,我们这里为了便于理解,只画出 v = i n j v=in_j v=inj的情况:
∂ v v e ( t − 1 ) ∂ v j ( t ) = ∂ y v ( t − 1 ) ∂ n e t v ( t − 1 ) ( ∂ v o u t j ( t ) ∂ v j ( t ) ∂ n e t o u t j ( t ) ∂ y v ( t − 1 ) + ∂ v i n j ( t ) ∂ v j ( t ) ∂ n e t i n j ( t ) ∂ y v ( t − 1 ) + ∂ v c j ( t ) ∂ v j ( t ) ∂ n e t c j ( t ) ∂ y v ( t − 1 ) ) ≈ t r 0. (39) \begin{aligned} \frac{\partial v_v^e(t-1)}{\partial v_j(t)}&= \frac{\partial y^v(t-1)}{\partial net_v(t-1)}( \frac{\partial v_{out_j}(t)}{\partial v_j(t)}\frac{\partial net_{out_j}(t)}{\partial y^v(t-1)}+ \frac{\partial v_{in_j}(t)}{\partial v_j(t)}\frac{\partial net_{in_j}(t)}{\partial y^v(t-1)} + \frac{\partial v_{c_j}(t)}{\partial v_j(t)}\frac{\partial net_{c_j}(t)}{\partial y^v(t-1)}) \\ &\approx_{tr}0\tag{39}. \end{aligned} ∂vj(t)∂vve(t−1)=∂netv(t−1)∂yv(t−1)(∂vj(t)∂voutj(t)∂yv(t−1)∂netoutj(t)+∂vj(t)∂vinj(t)∂yv(t−1)∂netinj(t)+∂vj(t)∂vcj(t)∂yv(t−1)∂netcj(t))≈tr0.(39)
根据截断求导规则,上式中的 ∂ n e t o u t j ( t ) ∂ y v ( t − 1 ) ≈ t r 0 \frac{\partial net_{out_j}(t)}{\partial y^v(t-1)}\approx_{tr}0 ∂yv(t−1)∂netoutj(t)≈tr0, ∂ n e t i n j ( t ) ∂ y v ( t − 1 ) ≈ t r 0 \frac{\partial net_{in_j}(t)}{\partial y^v(t-1)}\approx_{tr}0 ∂yv(t−1)∂netinj(t)≈tr0, ∂ n e t c j ( t ) ∂ y v ( t − 1 ) ≈ t r 0 \frac{\partial net_{c_j}(t)}{\partial y^v(t-1)}\approx_{tr}0 ∂yv(t−1)∂netcj(t)≈tr0,因此上式应用截断求导之后为0。
上式的意义就在于,证明了应用截断规则后,从记忆单元出口处的误差值,不会经由 i n j , o u t j , c j in_j,out_j,c_j inj,outj,cj传播到其他任何门和单元。(其实用眼睛看也可以一眼看出来)
6.8 记忆单元内部的误差流计算
最后,让我们来关注从记忆单元出口处的误差,传递到记忆单元内的CEC的情况。这也是整个模型中唯一的错误信息会跨时间步传递的误差流。
给定时间步 q q q,我们计算 ∂ v s c j ( t − q ) ∂ v j ( t ) \frac{\partial v_{s_{c_j}}(t-q)}{\partial v_j(t)} ∂vj(t)∂vscj(t−q):
当 q = 0 q=0 q=0时,我们可以看下图的误差传播路径:
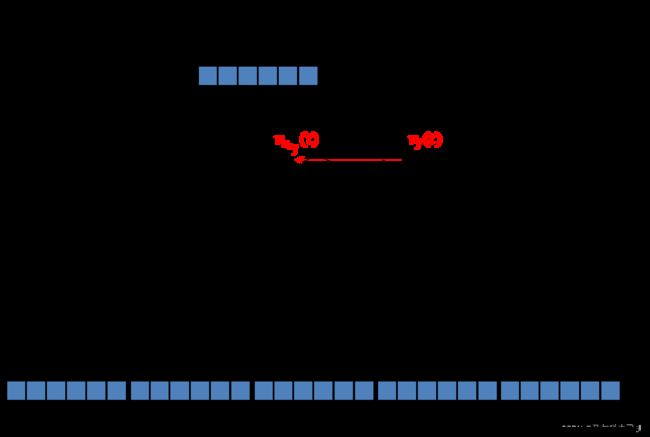
根据上图,容易得到:
∂ v s c j ( t − q ) ∂ v j ( t ) = ∂ v s c j ( t ) ∂ v j ( t ) = ∂ y c j ( t ) ∂ s c j ( t ) \begin{aligned} \frac{\partial v_{s_{c_j}}(t-q)}{\partial v_j(t)}&=\frac{\partial v_{s_{c_j}}(t)}{\partial v_j(t)}=\frac{\partial y^{c_j}(t)}{\partial s_{c_j}(t)} \end{aligned} ∂vj(t)∂vscj(t−q)=∂vj(t)∂vscj(t)=∂scj(t)∂ycj(t)
当 q = 1 q=1 q=1时,误差传播路径如下图所示(隐藏了无关的单元,只保留记忆单元):
∂ v s c j ( t − q ) ∂ v j ( t ) = ∂ v s c j ( t − 1 ) ∂ v j ( t ) ≈ t r ∂ v j ( t ) ∂ y c j ( t ) ∂ s c j ( t ) ∂ s c j ( t ) ∂ s c j ( t − 1 ) ∂ v j ( t ) ≈ t r ∂ y c j ( t ) ∂ s c j ( t ) ∂ s c j ( t ) ∂ s c j ( t − 1 ) ≈ t r ∂ s c j ( t ) ∂ s c j ( t − 1 ) ∂ v s c j ( t ) ∂ v j ( t ) \begin{aligned} \frac{\partial v_{s_{c_j}}(t-q)}{\partial v_j(t)}&=\frac{\partial v_{s_{c_j}}(t-1)}{\partial v_j(t)}\\ &\approx_{tr}\frac{\partial v_j(t)\frac{\partial y^{c_j}(t)}{\partial s_{c_j}(t)}\frac{\partial s_{c_j}(t)}{\partial s_{c_j}(t-1)}}{\partial v_j(t)}\\ &\approx_{tr}\frac{\partial y^{c_j}(t)}{\partial s_{c_j}(t)}\frac{\partial s_{c_j}(t)}{\partial s_{c_j}(t-1)}\\ &\approx_{tr}\frac{\partial s_{c_j}(t)}{\partial s_{c_j}(t-1)}\frac{\partial v_{s_{c_j}}(t)}{\partial v_j(t)} \end{aligned} ∂vj(t)∂vscj(t−q)=∂vj(t)∂vscj(t−1)≈tr∂vj(t)∂vj(t)∂scj(t)∂ycj(t)∂scj(t−1)∂scj(t)≈tr∂scj(t)∂ycj(t)∂scj(t−1)∂scj(t)≈tr∂scj(t−1)∂scj(t)∂vj(t)∂vscj(t)
当 q > 1 q>1 q>1时:

∂ v s c j ( t − q ) ∂ v j ( t ) ≈ t r ∂ v j ( t ) ∂ y c j ( t ) ∂ s c j ( t − q + 1 ) ∂ s c j ( t − q + 1 ) ∂ s c j ( t − q ) ∂ v j ( t ) ≈ t r ∂ y c j ( t ) ∂ s c j ( t − q + 1 ) ∂ s c j ( t − q + 1 ) ∂ s c j ( t − q ) ≈ t r ∂ v s c j ( t − q + 1 ) ∂ v j ( t ) ∂ s c j ( t − q + 1 ) ∂ s c j ( t − q ) \begin{aligned} \frac{\partial v_{s_{c_j}}(t-q)}{\partial v_j(t)}&\approx_{tr}\frac{\partial v_j(t)\frac{\partial y^{c_j}(t)}{\partial s_{c_j}(t-q+1)}\frac{\partial s_{c_j}(t-q+1)}{\partial s_{c_j}(t-q)}}{\partial v_j(t)}\\ &\approx_{tr}\frac{\partial y^{c_j}(t)}{\partial s_{c_j}(t-q+1)}\frac{\partial s_{c_j}(t-q+1)}{\partial s_{c_j}(t-q)}\\ &\approx_{tr}\frac{\partial v_{s_{c_j}}(t-q+1)}{\partial v_j(t)}\frac{\partial s_{c_j}(t-q+1)}{\partial s_{c_j}(t-q)} \end{aligned} ∂vj(t)∂vscj(t−q)≈tr∂vj(t)∂vj(t)∂scj(t−q+1)∂ycj(t)∂scj(t−q)∂scj(t−q+1)≈tr∂scj(t−q+1)∂ycj(t)∂scj(t−q)∂scj(t−q+1)≈tr∂vj(t)∂vscj(t−q+1)∂scj(t−q)∂scj(t−q+1)
因此我们可得:
∂ v s c j ( t − q ) ∂ v j ( t ) ≈ t r { ∂ y c j ( t ) ∂ s c j ( t ) ( q = 0 ) ∂ s c j ( t − q + 1 ) ∂ s c j ( t − q ) ∂ v s c j ( t − q + 1 ) ∂ v j ( t ) ( q > 0 ) . (40) \frac{\partial v_{s_{c_j}}(t-q)}{\partial v_j(t)}\approx_{tr} \begin{cases} \frac{\partial y^{c_j}(t)}{\partial s_{c_j}(t)} &(q=0)\\ \frac{\partial s_{c_j}(t-q+1)}{\partial s_{c_j}(t-q)}\frac{\partial v_{s_{c_j}}(t-q+1)}{\partial v_j(t)}&(q>0) \end{cases}\tag{40}. ∂vj(t)∂vscj(t−q)≈tr⎩ ⎨ ⎧∂scj(t)∂ycj(t)∂scj(t−q)∂scj(t−q+1)∂vj(t)∂vscj(t−q+1)(q=0)(q>0).(40)
将式40扩展为计算记忆节点在时刻 t t t的误差值,传播到 t − q t-q t−q时刻任意节点 v v v时的误差,误差传播路经如下图所示:

从上图可知在 t − q t-q t−q时刻,只有 n e t i n j net_{in_j} netinj, n e t c j net_{c_j} netcj处,即 v ∈ { i n j , c j } v\in\{in_j,c_j\} v∈{inj,cj}时,可以得到 v j ( t ) v_j(t) vj(t)传过来的非零误差。其他位置都是0。我们标记任意节点 v v v在 t − q t-q t−q时刻收到的误差信息为 v v ( t − q ) v_v(t-q) vv(t−q),我们计算 t t t时刻记忆单元出口处与 v v ( t − q ) v_v(t-q) vv(t−q)之间的误差流:
∂ v v ( t − q ) ∂ v j ( t ) ≈ t r ∂ v v ( t − q ) ∂ v s c j ( t − q ) ∂ v s c j ( t − q ) ∂ v j ( t ) ≈ t r ∂ v v ( t − q ) ∂ v s c j ( t − q ) ∂ s c j ( t − q + 1 ) ∂ s c j ( t − q ) ∂ v s c j ( t − q + 1 ) ∂ v j ( t ) ≈ t r ∂ v v ( t − q ) ∂ v s c j ( t − q ) ( ∂ s c j ( t − q + 1 ) ∂ s c j ( t − q ) ∂ s c j ( t − q + 2 ) ∂ s c j ( t − q + 1 ) ∂ s c j ( t − q + 3 ) ∂ s c j ( t − q + 2 ) ⋯ ∂ s c j ( t + 1 ) ∂ s c j ( t ) ) ∂ v s c j ( t ) ∂ v j ( t ) ≈ t r ∂ v v ( t − q ) ∂ v s c j ( t − q ) ( ∏ m = 0 q ∂ s c j ( t − m + 1 ) ∂ s c j ( t − m ) ) ∂ v s c j ( t ) ∂ v j ( t ) ≈ t r ∂ v v ( t − q ) ∂ v s c j ( t − q ) ∂ v s c j ( t ) ∂ v j ( t ) ≈ t r y o u t j ( t ) h ′ ( s c j ( t ) ) { g ′ ( n e t c j ( t − q ) ) y i n j ( t − q ) v = c j g ( n e t c j ( t − q ) ) f i n j ′ ( n e t i n j ( t − q ) ) v = i n j 0 O t h e r w i s e . (41) \begin{aligned} \frac{\partial v_v(t-q)}{\partial v_j(t)}&\approx_{tr}\frac{\partial v_v(t-q)}{\partial v_{s_{c_j}}(t-q)}\frac{\partial v_{s_{c_j}}(t-q)}{\partial v_j(t)}\\ &\approx_{tr} \frac{\partial v_v(t-q)}{\partial v_{s_{c_j}}(t-q)}\frac{\partial s_{c_j}(t-q+1)}{\partial s_{c_j}(t-q)}\frac{\partial v_{s_{c_j}}(t-q+1)}{\partial v_j(t)}\\ &\approx_{tr} \frac{\partial v_v(t-q)}{\partial v_{s_{c_j}}(t-q)}(\frac{\partial s_{c_j}(t-q+1)}{\partial s_{c_j}(t-q)}\frac{\partial s_{c_j}(t-q+2)}{\partial s_{c_j}(t-q+1)}\frac{\partial s_{c_j}(t-q+3)}{\partial s_{c_j}(t-q+2)}\cdots\frac{\partial s_{c_j}(t+1)}{\partial s_{c_j}(t)})\frac{\partial v_{s_{c_j}}(t)}{\partial v_j(t)}\\ &\approx_{tr}\frac{\partial v_v(t-q)}{\partial v_{s_{c_j}}(t-q)}(\prod_{m=0}^q\frac{\partial s_{c_j}(t-m+1)}{\partial s_{c_j}(t-m)})\frac{\partial v_{s_{c_j}}(t)}{\partial v_j(t)}\\ &\approx_{tr}\frac{\partial v_v(t-q)}{\partial v_{s_{c_j}}(t-q)}\frac{\partial v_{s_{c_j}}(t)}{\partial v_j(t)}\\ &\approx_{tr}y^{out_j}(t)h'(s_{c_j}(t)) \begin{cases} g'(net_{c_j}(t-q))y^{in_j}(t-q)&v=c_j\\ g(net_{c_j}(t-q))f'_{in_j}(net_{in_j}(t-q)) &v=in_j\\ 0&Otherwise \end{cases}\tag{41}. \end{aligned} ∂vj(t)∂vv(t−q)≈tr∂vscj(t−q)∂vv(t−q)∂vj(t)∂vscj(t−q)≈tr∂vscj(t−q)∂vv(t−q)∂scj(t−q)∂scj(t−q+1)∂vj(t)∂vscj(t−q+1)≈tr∂vscj(t−q)∂vv(t−q)(∂scj(t−q)∂scj(t−q+1)∂scj(t−q+1)∂scj(t−q+2)∂scj(t−q+2)∂scj(t−q+3)⋯∂scj(t)∂scj(t+1))∂vj(t)∂vscj(t)≈tr∂vscj(t−q)∂vv(t−q)(m=0∏q∂scj(t−m)∂scj(t−m+1))∂vj(t)∂vscj(t)≈tr∂vscj(t−q)∂vv(t−q)∂vj(t)∂vscj(t)≈tryoutj(t)h′(scj(t))⎩ ⎨ ⎧g′(netcj(t−q))yinj(t−q)g(netcj(t−q))finj′(netinj(t−q))0v=cjv=injOtherwise.(41)
通过上式可以看出,误差流的变化只有分别与 t t t和 t − q t-q t−q时刻有关,在不同时间步之间流经CEC时未受影响。最后Sepp Hochreiter指出以下几点:
- y o u t j ( t ) y^{out_j}(t) youtj(t)可以在误差流进入记忆单元之前就缩小误差值。也会在之后的训练步骤中降低记忆单元产生的误差值。
- 根据式35可知, v s c j ( t ) = v s c j ( t + 1 ) + C v_{s_{c_j}}(t) = v_{s_{c_j}}(t+1) + C vscj(t)=vscj(t+1)+C,因此随着时间步数的增加, s c j s_{c_j} scj会出现漂移的情况,如果 s c j ( t ) s_{c_j}(t) scj(t)产生一个大值(大正值或大负值),该值会被 h ′ ( s c j ( t ) ) h'(s_{c_j}(t)) h′(scj(t))截断。同时,也可通过给 i n j in_j inj设置适当的偏移量来优化该问题(现在我们通过增加遗忘门解决该问题,这个遗忘门也成为新的标准LSTM模型的一部分)。
- 如果我们给 i n j in_j inj设置了用与抗衡 s c j s_{c_j} scj漂移的反向偏移值,那么会导致 y i n j ( t − q ) y^{in_j}(t-q) yinj(t−q)和 ( n e t i n j ( t − q ) ) (net_{in_j}(t-q)) (netinj(t−q))的值变小,这样的影响对比放任 s c j s_{c_j} scj漂移的影响来说微不足道。
总之一句话,LSTM模型比没有记忆单元的RNN模型好很多。
由于文章太长,我把整个文章分为上中下三篇,本篇为最后一篇。
上篇:上篇在此
中篇:中篇在此
下篇:下篇在此