MATLAB与ROS联合仿真——ROS环境搭建及相关准备工作(下)
本篇文章主要介绍在安装完ROS后,在进行MATLAB与ROS联合仿真之前,需要进行的一些环境搭建以及准备工作,主要分为 创建ROS工作空间及功能包、必备功能包安装、安装Gazebo11、导入实验功能包至工作空间、安装Visual_Studio_Code(选做)、常用便捷工具安装(选做) 六部分。
本部分内容共分为上下两篇,上篇包括创建ROS工作空间及功能包和必备功能包安装这两部分,下篇包括、安装Gazebo11、导入实验功能包至工作空间、安装Visual_Studio_Code(选做)、常用便捷工具安装(选做)这四部分。

第三部分 安装Gazebo11
1.设置你的电脑来接收软件
sudo sh -c 'echo "deb http://packages.osrfoundation.org/gazebo/ubuntu-stable `lsb_release -cs` main" > /etc/apt/sources.list.d/gazebo-stable.list'
2.设置秘钥
wget https://packages.osrfoundation.org/gazebo.key -O - | sudo apt-key add -
3.安装Gazebo
sudo apt-get update
sudo apt-get install gazebo11
sudo apt-get install libgazebo11-dev
4.检查你的安装
gazebo
5.安装其他关联安装包(应该已自动安装了,可输入指令看一下是否已自动安装,没装的话装一下)
sudo apt-get install ros-noetic-rviz
sudo apt-get install ros-noetic-robot-state-publisher
sudo apt-get install ros-noetic-gazebo-ros-pkgs ros-noetic-gazebo-ros-control
sudo apt install ros-noetic-moveit
6、运行 安装包索引
sudo apt-get update
第四部分 导入实验功能包至工作空间
1、将实验资料里的ackerman_sim功能包复制到工作空间catkin_ws的src文件夹下,如果不能粘贴,就在win10下选中该功能包,直接拖到虚拟机下的src文件夹下

2、打开ackerman_sim功能包将smartcar_plane文件夹复制

在主文件夹下,使用Ctrl+h,显示隐藏文件,选择,.gazebo文件夹,打开后选择models文件夹,打开后将刚才复制的文件粘贴至该文件夹下,如下所示:(如果没有找到.gazebo文件夹,说明你安装完成后没有启动过,启动一次后就生成了,如果没有models文件夹就在.gazebo文件夹下自己创建一个)

3、我整理下载了一些常用的gazebo模型,由于GitHub网站访问并不友好,所以想要使用某些模型的时候,最好先下载至本地,然后添加至gazebo的models中,就像上一步一样,大家可以把实验资料里的模型按照上一步的方法导入进行(选做)
大家拿到的是下面这样一个压缩包,将其复制到虚拟机,要是不能粘贴,同样采用拖拽的方式

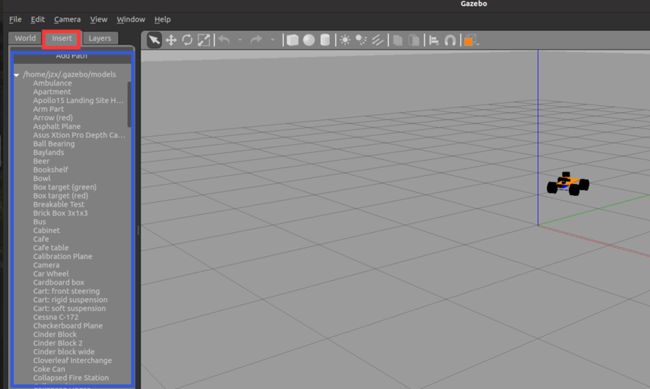
将压缩包复制到虚拟机后,双击打开,讲里面的内容拖拽至主文件下完成解压,这时候压缩包就可以删除了,打开解压后的文件夹,选择你想要的,或者全部,添加到第2步提到的models文件夹下就可以了,此时打开gazebo,在insert界面就可以看到导入的本地模型了
4、之前也提过了,在我们对工作空间进行修改后,要重新编译工作空间,依次执行下面三条指令:
cd ~/catkin_ws/
catkin_make
source ~/catkin_ws/devel/setup.bash
第五部分 安装Visual_Studio_Code(选做)
Ubuntu环境下安装Vscode有多种方式,这里介绍的是作为一个 Snap 软件包安装 Visual Studio Code,这种方式比较简单,较适合新手,但存在一些局限性,部分功能受限,所以此处也可以根据需要,更改为使用完整版安装方式
Snaps 是一种自包含的软件包,它包含需要运行这个应用所有的依赖。 Snap 软件包容易升级,并且非常安全。和标准的 deb 软件包不同,snaps 需要占用更大的磁盘空间,和 更长的应用启动时间。
Snap 软件包可以通过命令行或者 Ubuntu 软件应用来安装。
想要安装 VS Code snap版,打开你的终端(Ctrl+Alt+T)并且运行下面的命令:
sudo snap install --classic code
Visual Studio Code 已经在你的 Ubuntu 机器上安装好了,你可以开始使用它了。
第六部分 常用便捷工具安装(选做)
1、安装可视化分区工具gparted
在我们创建虚拟机的时候,如果分配的磁盘过小,在后续的使用时可能需要进行扩容,在扩容后你会发现好像磁盘并没有变大,这时候就需要进行重新分区,Ubuntu重新分区的方法很多,这里我采用了较简单的一种,采用可视化分区工具gparted进行重新分区,使用以下指令进行安装:
sudo apt-get install gparted
2、安装自动格式化整理代码功能包clang-format-9
使用以下指令进行安装:
sudo apt-get install clang-format-9
3、安装软件包管理器synaptic
打开终端并输入以下指令进行安装:
sudo apt-get install synaptic