论文解读|2020 CVPR:PointASNL:基于自适应采样的非局部神经网络点云鲁棒处理
原创 | 文 BFT机器人

01
背景
点云是由大量的点组成的三维数据集,通常由激光雷达或摄像机等传感器采集。点云数据处理是计算机视觉和机器学习领域的重要研究方向,应用广泛,例如自动驾驶、机器人导航、三维建模等。然而,点云数据通常存在噪声、异常值和不规则采样等问题,这些问题会影响点云数据的质量和准确性。
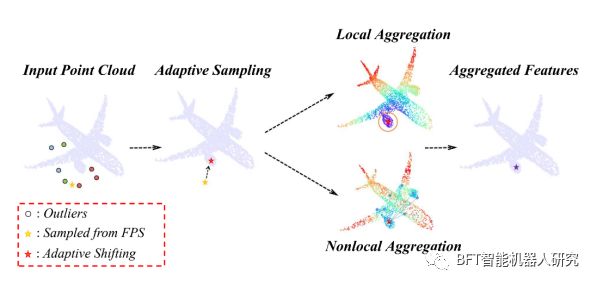
图1 PointASNL的应用
02
创新点
本论文的创新点主要有三个方面:
1)提出了一种端到端的模型PointASNL,用于处理带有噪声或异常值的点云数据;
2)引入了自适应采样(AS)模块可以自适应地调整初始采样点的坐标,使其更适合具有内在几何特征的特征学习,并且对于噪声异常值更加鲁棒;
3)在局部-非局部(L-NL)模块中设计了点非局部单元,增强了点局部单元中的特征学习。这些创新点使得PointASNL在点云分类和分割任务中具有更好的鲁棒性和性能。
03
算法介绍
PointASNL算法主要分为两个部分:自适应采样(AS)模块和局部-非局部(L-NL)模块。在AS模块中,首先从原始点云中随机选择一组采样点,然后通过自适应采样策略调整采样点的位置,以便更好地捕获点云的内在几何特征。
具体来说,AS模块使用可微分的采样策略,通过最小化采样点之间的距离和最大化采样点与原始点云之间的距离来调整采样点的位置。在L-NL模块中,首先使用k-最近邻算法查询每个采样点的局部邻域,然后使用点非局部单元来捕获采样点的非局部依赖性。
点非局部单元使用基于图的学习或定义类似于卷积的操作来捕获采样点的非局部依赖性。最后,L-NL模块将局部和非局部依赖性结合起来,生成最终的特征表示。在分类任务中,PointASNL使用全连接层、dropout和softmax层来生成预测结果。
在分割任务中,PointASNL使用编码器-解码器结构,其中编码器使用AS和L-NL模块来提取特征,解码器使用最近邻插值来获取上采样的特征,并使用L-NL块进行更好的特征学习。
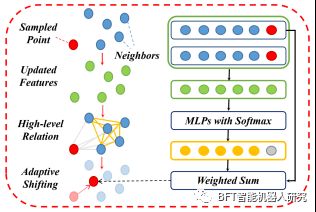
图2 自适应采样 (AS) 模块结构

图2 局部-非局部(L-NL)模块结构
PointASNL中的自适应采样(AS)模块通过重新加权最远点采样(FPS)周围的邻居,然后自适应地调整整个点云中采样点的位置,以处理带有噪声或异常值的点云。
这种可微分的采样策略可以微调采样点的空间分布,从而大大提高网络的鲁棒性。
PointASNL可以应用于室内和室外点云数据。该论文指出,广泛的实验验证了他们的方法在点云处理任务中的鲁棒性和优越性,无论是合成数据、室内数据还是室外数据,都可以处理带有或不带有噪声的数据。
04
实验
本论文的实验过程主要包括两个任务:点云分类和点云分割。
在点云分类任务中,作者使用了ModelNet10和ModelNet40数据集进行实验,对比了PointASNL算法和其他经典算法的性能,并分析了自适应采样和局部-非局部模块的有效性。

表1 ModelNet10(M10)和ModelNet40(M40) 数据集上的总体精度
在点云分割任务中,作者使用了S3DIS和Semantic3D数据集进行实验,对比了PointASNL算法和其他经典算法的性能,并分析了自适应采样和局部-非局部模块的有效性。

表2 室内S3DIS和ScanNet数据集上的分割结果
05
结论
本论文提出的PointASNL算法在点云分类和点云分割任务中具有更好的性能和鲁棒性。PointASNL算法通过自适应采样和局部-非局部模块来提高点云处理的鲁棒性和性能。
自适应采样模块可以自适应地调整初始采样点的坐标,使其更适合具有内在几何特征的特征学习,并且对于噪声异常值更加鲁棒。
局部-非局部模块可以捕获采样点的局部和非局部依赖性,从而提高了网络的性能。实验结果表明,PointASNL算法在点云分类和点云分割任务中具有更好的性能和鲁棒性,可以作为点云处理领域的一种有效算法。
作者 | Azukii
排版 | 居居手
更多精彩内容请关注公众号:BFT机器人
本文为原创文章,版权归BFT机器人所有,如需转载请与我们联系。若您对该文章内容有任何疑问,请与我们联系,将及时回应。