自监督去噪:Recorrupted-to-Recorrupted原理分析与总结
文章目录
-
- 1. 方法原理
-
- 1.1 相关研究
- 1.2 研究思路
- 1.3 小结
- 2. 实验结果
- 3. 总结
文章地址: https://ieeexplore.ieee.org/document/9577798/footnotes#footnotes
参考博客: https://github.com/PangTongyao/Recorrupted-to-Recorrupted-Unsupervised-Deep-Learning-for-Image-Denoising
1. 方法原理
1.1 相关研究
Noise2Noise的问题
- 噪声图像对不好获取
- 同一场景不同图像怎么对齐?
解决N2N配对问题的工作可以分为两类
-
数据增强方法:
- Noise2Void 和 Noise2Self使用盲点网络的方法避免过拟合(直接点到点映射)
- Noiser2Noise 和 Noise-as-Clean 是采样额外的噪声数据配对进行训练
-
正则化去噪的DNN:
- Stein’s Unbiased Risk Estimator(SURE)通过添加对预测结果散度的惩罚添加正则
- Deep Image Prior 使用 early-stopping 防止过拟合
- Self2Self中使用 Dropout引入不确定性估计,提高去噪的鲁棒性。
研究动机
- 无监督/自监督学习在实际工作、缺少干净数据的时候是非常有效的
- 现有的无监督方法还无法和监督学习媲美
1.2 研究思路
从可加性的高斯噪声出发,配对的噪声数据对科比表示为
y = x + n n ∼ N ( 0 , σ 1 2 I ) y ′ = x + n ′ n ′ ∼ N ( 0 , σ 2 2 I ) \begin{aligned} y &= x + n ~~~~ n \sim N(0,\sigma_1^2 I) \\ y' &= x + n' ~~~~ n' \sim N(0,\sigma_2^2 I) \end{aligned} yy′=x+n n∼N(0,σ12I)=x+n′ n′∼N(0,σ22I)
Noise2Noise的L2损失函数需要优化
E n , n ′ { ∣ ∣ F θ ( y ) − y ′ ∣ ∣ 2 2 } E_{n,n'}\{ ||F_{\theta}(y) - y'||_2^2\} En,n′{∣∣Fθ(y)−y′∣∣22}
将其展开进行推导
E n , n ′ { ∣ ∣ F θ ( y ) − y ′ ∣ ∣ 2 2 } = E n , n ′ { ∣ ∣ F θ ( y ) − x − n ′ ∣ ∣ 2 2 } = E n , n ′ { ∣ ∣ F θ ( y ) − x ∣ ∣ 2 2 − 2 ( n ′ ) T ( F θ ( y ) − x ) + ( n ′ ) T n ′ } = E n , n ′ { ∣ ∣ F θ ( y ) − x ∣ ∣ 2 2 } − 2 E n , n ′ { ( n ′ ) T F θ ( y ) } + c o n s t \begin{aligned} &E_{n,n'}\{ ||F_{\theta}(y) - y'||_2^2\} \\ &= E_{n,n'}\{ ||F_{\theta}(y) - x - n'||_2^2\} \\ &= E_{n,n'}\{ ||F_{\theta}(y) - x||_2^2 - 2(n')^T(F_{\theta}(y) -x) + (n')^Tn' \} \\ &= E_{n,n'}\{ ||F_{\theta}(y) - x||_2^2\} - 2E_{n,n'}\{ (n')^T F_{\theta}(y)\} + const \end{aligned} En,n′{∣∣Fθ(y)−y′∣∣22}=En,n′{∣∣Fθ(y)−x−n′∣∣22}=En,n′{∣∣Fθ(y)−x∣∣22−2(n′)T(Fθ(y)−x)+(n′)Tn′}=En,n′{∣∣Fθ(y)−x∣∣22}−2En,n′{(n′)TFθ(y)}+const
如果噪声 n n n 和 n ′ n' n′ 是独立的,那么 E n , n ′ { ( n ′ ) T F θ ( y ) } = 0 E_{n,n'} \{(n')^T F_{\theta}(y)\} = 0 En,n′{(n′)TFθ(y)}=0,也就是说噪声对监督学习和噪声-干净数据的监督学习可以得到相同的优化结果。现在的问题就是如何从一张噪声图片( y y y)中构建出一对具有独立噪声的数据( y ^ , y ~ \widehat{y},\widetilde{y} y ,y )
根据假设,噪声的分布是 AWGN(additive white Gaussian noise),那么噪声服从分布 n ∼ N ( 0 , σ 1 2 I ) n \sim N(0,\sigma_1^2 I) n∼N(0,σ12I)。 现在根据下方的方法进行采样
y ^ = y + D T z , y ~ = y − D − 1 z , z ∼ N ( 0 , σ 1 2 I ) \widehat{y} = y + D^Tz,~~~ \widetilde{y} = y - D^{-1}z,~~~ z \sim N(0,\sigma_1^2 I) y =y+DTz, y =y−D−1z, z∼N(0,σ12I)
其中D可以是任何可逆矩阵,文章中证明了 噪声样本 y ^ \widehat{y} y 和 y ~ \widetilde{y} y 相互独立,所以根据这两个样本训练的网络满足
E n , z { ∣ ∣ F θ ( y ^ ) − y ~ ∣ ∣ 2 2 } = E n ^ { ∣ ∣ F θ ( x + n ^ ) − x ∣ ∣ 2 2 } E_{n,z}\{||F_{\theta}(\widehat{y}) - \widetilde{y}||_2^2\} = E_{\widehat{n}} \{ ||F_{\theta}(x + \widehat{n}) - x||_2^2 \} En,z{∣∣Fθ(y )−y ∣∣22}=En {∣∣Fθ(x+n )−x∣∣22}
其中 n ^ = n + D T z \widehat{n} = n + D^Tz n =n+DTz
那么对于这种无结构噪声数据:
y k = x k + n k , x k ∼ X , n k ∼ N ( 0 , σ 2 I ) y^k = x^k + n^k,~~~ x^k \sim X , ~~~ n^k \sim ~ N(0,\sigma^2I) yk=xk+nk, xk∼X, nk∼ N(0,σ2I)
用噪声数据对 { ( y ^ k , y ~ k ) (\widehat{y}^k, \widetilde{y}^k) (y k,y k)}定义的损失函数为也就等价于下面这个损失函数了
E x , n ^ { ∣ ∣ F θ ( x + n ^ ) − x ∣ ∣ 2 2 } E_{x,\widehat{n}}\{ ||F_{\theta}(x + \widehat{n}) - x||_2^2\} Ex,n {∣∣Fθ(x+n )−x∣∣22}
对于结构化的噪声数据,可以调整噪声数据的表示形式:比如噪声的分布和干净数据相关
n服从 N ( 0 , ∑ x ) N(0,\sum_x) N(0,∑x)的正态分布,可以将噪声对表示为
y ^ = y + ∑ x D T z , y ~ = y − ∑ x D − 1 z , z ∼ N ( 0 , I ) \widehat{y} = y + \sqrt{\sum_x}D^Tz , ~~~ \widetilde{y} = y - \sqrt{\sum_x}D^{-1}z, z \sim N(0,I) y =y+x∑DTz, y =y−x∑D−1z,z∼N(0,I)
其中协方差差矩阵 ∑ x \sum_x ∑x是正定矩阵,其满足 ∑ x T = ∑ x , ∑ x ∑ x = ∑ x \sqrt{\sum_x}^T = \sqrt{\sum_x}, ~~~ \sqrt{\sum_x}\sqrt{\sum_x} = \sum_x ∑xT=∑x, ∑x∑x=∑x
1.3 小结
- 从数学推导上证明了 R2R的方法和监督学习的可比性
- 相比其他无监督去噪方法,该方法简单且灵活,也可以直接在噪声图像上进行处理
- 去噪效果很好,在真实数据中也应用非常好
2. 实验结果
-
去除高斯噪声效果对比,R2R的效果比当前最好的 SURE 效果还要好。这里的 D = α I D = \alpha I D=αI 和 D − 1 = I / α D^{-1} = I/\alpha D−1=I/α,其中 α = 0.5 \alpha = 0.5 α=0.5
-
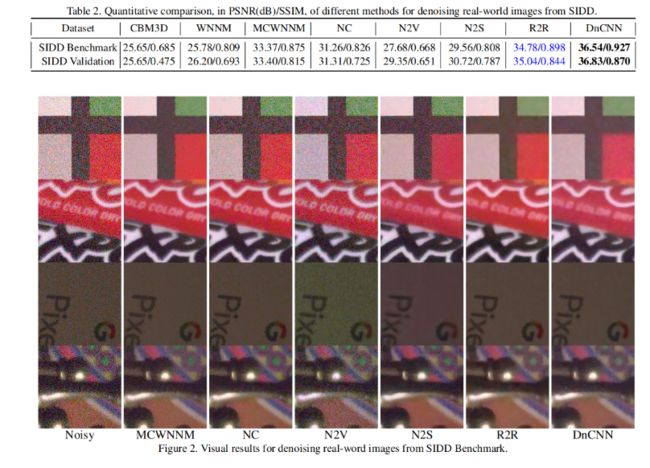
去除真实图片中的噪声:噪声水平函数(noisy level function)给定,噪声函数建模为 heteroscedastic signle dependent Gaussian single, 其协方差为
∑ x = d i a g ( β 1 x + β 2 ) \sum_x = diag(\beta_1 x + \beta_2) x∑=diag(β1x+β2)
设置 D = 2 I , D − 1 = I / 2 D = 2I , D^{-1} = I/2 D=2I,D−1=I/2。训练的结果展示R2R的效果在各种传统方法和无监督中是最好的,但是和监督学习仍然存在一定的差距。分析原因是:噪声模式和噪声水平函数的估计不准确 -
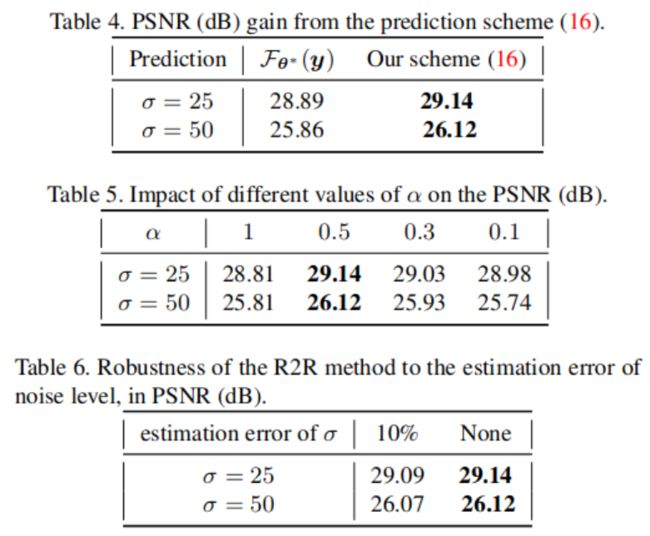
消融实验:比如对比不同的噪声水平的预测结果

3. 总结
优势:
- 相比Noise2Noise:不需要配对噪声图片,而是根据一张噪声图片加噪
- 相比Noiser2Noise:都是采样加噪,都需要估计噪声模式,但是本文的方法从数学上的推导更加严谨一些,同时也给定了如何加噪声的方式。
- 相比Noise2Void,Noise2Self:作者对比了效果,会更好(我自己还需要补一个实验证明)
- 这种方法可以应用到实际噪声之中,但是如何估计噪声模式是个大问题
- 可以处理结构噪声和无结构噪声
缺点:
- 需要估计噪声模式,网络会继承噪声模式估计的误差
- 对于不同的噪声模式,其构建噪声对的方法会有所不同;
- 对于不同的损失函数,这种方法是否也是需要修改?比如现在想要去除图片中的文字,那么使用L1损失函数明显是会比L2损失函数更有优势的。那么上面的推导是不是也需要相应地修改?