MIT公开课18.06 Gilbert Strang 线性代数 笔记1 - Ax=b和四个子空间
文章目录
- 相关链接
-
- 课程链接
- 参考笔记链接
- 问题
- 第1讲:方程组的集合解释
-
- 1. 从方程组到矩阵
- 2. A x = b Ax = b Ax=b解法1:row picture 行图像
- 3. A x = b Ax = b Ax=b解法2:column pircture 列图像
-
- 数形结合:
-
- 数:
- 形:
- 4.问题:于任意的b,是否都能求解 A x = b Ax=b Ax=b?用列向量线性组合的观点阐述就是,列三维情况下,向量的线性组合能否覆盖整个三维向量空间?
- 5. 矩阵乘法方法
-
- 5.1 向量内积
- 5.2 列向量的线性组合
- 第2讲:矩阵消元
-
- 1.高斯消元法
-
- 1.1消元步骤
- 1.2 消元失效
- 2.新视角看矩阵乘法
-
- 旧角度
- 新角度
-
- 从列向量角度
- 从行向量角度
- 3.以矩阵运算角度描述高斯消元
- 4. 置换矩阵
- 5.矩阵的逆
- 第3讲:乘法和逆矩阵
-
- 1.矩阵乘法
-
- 1.1 一般性法则
- 1.2 整列相乘
- 1.3 整行相乘
- 1.4 列乘以行
- 1.5 分块乘法
- 2.逆(方阵)
-
- 2.1证明不可逆
- 2.2若矩阵有逆,求逆的方法(高斯·若尔丹Gauss-Jordan法)
- 第4讲: A A A的 L U LU LU分解
-
- 矩阵的逆和转置
- L U LU LU分解
- 将一个 n n n 阶方阵 A A A 变换为 U U U 需要的计算量估计:
- 置换矩阵(Permutation Matrix):
- 第5讲:转置-置换-向量空间 R R R
-
- 置换矩阵(Permutation Matrix)
- 转置矩阵(Transpose Matrix)
- 对称矩阵(Symmetric Matrix)
- 向量空间(Vector Space)
-
- 向量子空间
- 列空间
- 第6讲:列空间和零空间
-
- 列空间
- 零空间
- 第7讲:求解 A x = 0 Ax=0 Ax=0 主变量 特解
-
- 行阶梯矩阵
- 简化行阶梯矩阵
- 第8讲:求解 A x = b Ax=b Ax=b可解性和解的结构
-
- b b b是什么时, A x = b Ax=b Ax=b有解?
- 求解 A x = b Ax=b Ax=b算法
- 对秩为 r r r的 m × n m×n m×n矩阵 A A A的解讨论
- 第9讲:线性相关性、基、维数
-
- 线性相关性
- 基
- 维数
- 第10讲:四个基本子空间
-
- 列空间( C ( A ) C(A) C(A))
- 零空间( N ( A ) N(A) N(A))
- 行空间( C ( A T ) C(A^T) C(AT))
- 左零空间( N ( A T ) N(A^T) N(AT))
- 例子
- 矩阵空间
- 第11讲:矩阵空间、秩1矩阵和小世界图
-
- 矩阵空间
-
- 一些子空间
-
- 对称矩阵S (symmetric)
- 上三角矩阵U (upper triangular)
- 矩阵空间的交与和
- 微分方程例子
- 秩1矩阵
-
- 秩1矩阵的分解
- 问题1:所有的秩4的 5 × 17 5×17 5×17矩阵能构成一个子空间吗
- 问题2:取 R 4 \mathbb{R}^4 R4中满足 v 1 + v 2 + v 3 + v 4 = 0 v_1+v_2+v_3+v_4=0 v1+v2+v3+v4=0的所有向量。能组成一个向量子空间吗?
-
- 证明:
- 求子空间 S S S
- 小世界图
- 第12讲:图和网络
-
- 图的意义
- 关联矩阵表示
- 线性代数相关概念所表达的实际意义
-
- 零空间与电势差
- 左零空间与基尔霍夫电流定律
-
- 左零空间的基和回路
- 行空间与回路
- 左零空间的维数公式与欧拉公式
- 总结
- 第13讲:复习一
相关链接
课程链接
B站
网易公开课
mit open course ware
线性代数的本质(简易版课程):貌似有404的bug,b站搜索线性代数的本质即可
作业
参考笔记链接
github ApacheC 笔记书
CSDN 某博主笔记
问题
Win10视频单声道解决方案:
1.右键声音图标
![]()
2.打开声音设置

3.轻松访问音频设置

4.“打开单声道音频” 设为开

5.听完课后,可再设为关
第1讲:方程组的集合解释
1. 从方程组到矩阵

矩阵的诞生是为了用一种简洁的方式表达线性方程组
个人理解来说就是为了更好的描述和解决 Ax = b
从系统的角度来理解:
A:系统
x:输入
b:输出
2. A x = b Ax = b Ax=b解法1:row picture 行图像
矩阵分为行row和列column
row picture 关注矩阵行部分

将行所代表的方程以直线形式画出,求出交点即可得到行图像,从而得到方程的解
三维时的解法:求出三个平面的交点
3. A x = b Ax = b Ax=b解法2:column pircture 列图像
column picture关注列的部分,我们视一列为一个向量vector

求出合适的线性组合(linear combination),使得 Ax = b
数形结合:
数:
1 [ 2 − 1 ] + 2 [ − 1 2 ] = [ 0 3 ] ( 1 ) 1 \begin{bmatrix} 2 \\-1 \end{bmatrix} + 2\begin{bmatrix} -1 \\2\end{bmatrix} = \begin{bmatrix} 0 \\3 \end{bmatrix} \qquad \qquad \qquad (1) 1[2−1]+2[−12]=[03](1)
A:等式左边的两个常数列向量拼接成的常矩阵
x:两个变量x,y组成的向量 (注意x的含义区分:前者为向量,后者为组成该向量的一个变量)
b:目标向量
x = 1,y = 2时,Ax = b
形:

1倍的列向量1 和 2倍的列向量2 进行矢量和,可得目标向量
三维时的解法:求出三个三维向量的线性组合,得到目标向量
(维度三维及以上时,列图像解法更具优势)
4.问题:于任意的b,是否都能求解 A x = b Ax=b Ax=b?用列向量线性组合的观点阐述就是,列三维情况下,向量的线性组合能否覆盖整个三维向量空间?
答:如果三个向量在同一个平面上,问题就出现了——他们的线性组合也一定都在这个平面上。举个例子,如果col3=col1 + col2 ,那么不管怎么组合,这三个向量的结果都逃不出这个平面,因此当b在平面内,方程组有解,而当b不在平面内,这三个列向量就无法构造出b。在后面的课程中,我们会了解到这种情形称为奇异、矩阵不可逆。
下面我们推广到九维空间,每个方程有九个未知数,共九个方程,此时已经无法从坐标图像中描述问题了,但是我们依然可以从求九维列向量线性组合的角度解决问题,仍然是上面的问题,是否总能得到bb?当然这仍取决于这九个向量,如果我们取一些并不相互独立的向量,则答案是否定的,比如取了九列但其实只相当于八列,有一列毫无贡献(这一列是前面列的某种线性组合),则会有一部分bb无法求得。
5. 矩阵乘法方法
5.1 向量内积
A = [ a 1 , 1 a 1 , 2 a 1 , 3 a 2 , 1 a 2 , 2 a 2 , 3 ] B = [ b 1 , 1 b 1 , 2 b 2 , 1 b 2 , 2 b 3 , 1 b 3 , 2 ] C = A B = [ a 1 , 1 b 1 , 1 + a 1 , 2 b 2 , 1 + a 1 , 3 b 3 , 1 , a 1 , 1 b 1 , 2 + a 1 , 2 b 2 , 2 + a 1 , 3 b 3 , 2 a 2 , 1 b 1 , 1 + a 2 , 2 b 2 , 1 + a 2 , 3 b 3 , 1 , a 2 , 1 b 1 , 2 + a 2 , 2 b 2 , 2 + a 2 , 3 b 3 , 2 ] \begin{array}{l} A=\left[\begin{array}{lll} a_{1,1} & a_{1,2} & a_{1,3} \\ a_{2,1} & a_{2,2} & a_{2,3} \end{array}\right] \\ B=\left[\begin{array}{ll} b_{1,1} & b_{1,2} \\ b_{2,1} & b_{2,2} \\ b_{3,1} & b_{3,2} \end{array}\right] \\ C=A B=\left[\begin{array}{ll} a_{1,1} b_{1,1}+a_{1,2} b_{2,1}+a_{1,3} b_{3,1}, & a_{1,1} b_{1,2}+a_{1,2} b_{2,2}+a_{1,3} b_{3,2} \\ a_{2,1} b_{1,1}+a_{2,2} b_{2,1}+a_{2,3} b_{3,1}, & a_{2,1} b_{1,2}+a_{2,2} b_{2,2}+a_{2,3} b_{3,2} \end{array}\right] \end{array} A=[a1,1a2,1a1,2a2,2a1,3a2,3]B=⎣⎡b1,1b2,1b3,1b1,2b2,2b3,2⎦⎤C=AB=[a1,1b1,1+a1,2b2,1+a1,3b3,1,a2,1b1,1+a2,2b2,1+a2,3b3,1,a1,1b1,2+a1,2b2,2+a1,3b3,2a2,1b1,2+a2,2b2,2+a2,3b3,2]
左矩阵的所有行向量与右矩阵的所有列向量分别相乘并求和
5.2 列向量的线性组合
[ 2 5 1 3 ] [ 1 2 ] = 1 [ 2 1 ] + 2 [ 5 3 ] = [ 12 7 ] \begin{bmatrix} 2 & 5\\1 & 3\end{bmatrix}\begin{bmatrix} 1 \\2\end{bmatrix} = 1\begin{bmatrix} 2 \\1 \end{bmatrix} + 2 \begin{bmatrix} 5 \\3 \end{bmatrix} =\begin{bmatrix} 12\\7 \end{bmatrix} [2153][12]=1[21]+2[53]=[127]
将Ax看作A各列的线性组合
教授更推荐此方法,当数据量较大时更有优势
第2讲:矩阵消元
1.高斯消元法
1.1消元步骤

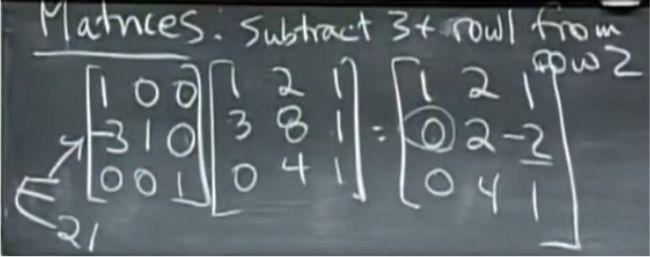
对该方程消元:
[ 1 ‾ 2 1 3 8 1 0 4 1 ] ⟶ row2-3row 1 [ 1 ‾ 2 1 0 2 − 2 0 4 1 ] \left[\begin{array}{lll} \underline{1} & 2 & 1 \\ 3 & 8 & 1 \\ 0 & 4 & 1 \end{array}\right] \stackrel{\text { row2-3row }_{1}}{\longrightarrow}\left[\begin{array}{ccc} \underline{1} & 2 & 1 \\ 0 & 2 & -2 \\ 0 & 4 & 1 \end{array}\right] ⎣⎡130284111⎦⎤⟶ row2-3row 1⎣⎡1002241−21⎦⎤
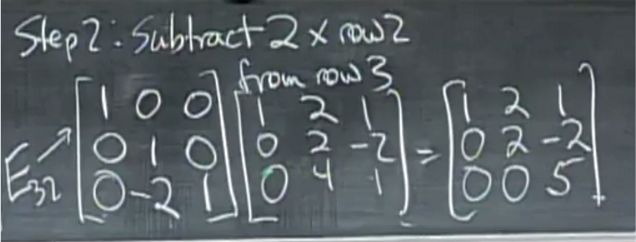
2.以y为主元,在第三个方程中消去y项
[ 1 ‾ 2 1 0 2 ‾ − 2 0 4 1 ] ⟶ row 3 − 2 r o w 2 [ 1 ‾ 2 1 0 2 ‾ − 2 0 0 5 ‾ ] \left[\begin{array}{ccc} \underline{1} & 2 & 1 \\ 0 & \underline{2} & -2 \\ 0 & 4 & 1 \end{array}\right] \stackrel{\text { row } 3-2 \mathrm{row} 2}{\longrightarrow}\left[\begin{array}{ccc} \underline{1} & 2 & 1 \\ 0 & \underline{2} & -2 \\ 0 & 0 & \underline{5} \end{array}\right] ⎣⎡1002241−21⎦⎤⟶ row 3−2row2⎣⎡1002201−25⎦⎤
3.回代:

1.2 消元失效
主元不能为0,否则需要交换行,使主元不为0
若有一行全部为0,则消元失效,矩阵也不可逆
2.新视角看矩阵乘法
旧角度
以矩阵中的元素为基本单位
AB:第i行A的所有元素 与 第j列B的所有元素 对应相乘的和,为AB的第i行,第j列元素
新角度
以向量为基本单位
从列向量角度

该矩阵有三个列向量,分别乘以三个系数 3 4 5,再求和,得到一个 3×1 的列向量
从行向量角度

该矩阵有三个行向量,分别乘以三个系数 1 2 7, 再求和,得到一个 1×3 的行向量
3.以矩阵运算角度描述高斯消元
要求1:第二行减去 3倍的第一行,其余行都不变
步骤:
第一行,不变,所以是1倍的第一行
第二行,-3倍的第一行 + 1倍的第二行 + 0倍的第三行,得到行向量[0,2,-2]
第三行,不变,所以是1倍的第三行
这个消元矩阵记为 E 21 E_{21} E21(E是指初等矩阵elementary matrix,由单位矩阵经过一次初等变换得到的矩阵;21是指使第2行,第1列元素为0)
要求2:第三行减去2倍的第二行,其余行不变
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-HMR9iqOx-1597991355771)(./1597558951965.png)]
对于矩阵乘法,结合律有效: E 32 ( E 21 A ) = ( E 32 E 21 ) A = E A = U E_{32}(E_{21}A)=(E_{32}E_{21})A=EA=U E32(E21A)=(E32E21)A=EA=U这意味着问题变成了如何找到一个矩阵E 使得EA=U矩阵E就是一堆初等矩阵elementary matrix的积。
4. 置换矩阵
要对矩阵进行行变换:左乘一个矩阵
要对矩阵进行列变换:右乘一个矩阵
5.矩阵的逆
引申:我要如何才能由U变回A呢?由此引入矩阵的逆,即我们知道EA=U,那么有矩阵S使得SU=A,矩阵S即为矩阵E的逆。

第3讲:乘法和逆矩阵
1.矩阵乘法
矩阵能相乘的条件: 左矩阵的列数 = 右矩阵的行数(m×n和n×p)
1.1 一般性法则
c i j = r o w i ⋅ c o l u m n j = ∑ k = i n a i k b k j c_{ij}=row_i\cdot column_j=\sum_{k=i}^na_{ik}b_{kj} cij=rowi⋅columnj=k=i∑naikbkj
1.2 整列相乘

- B可以看作多个列向量
- C中的第一列是A中的所有列的线性组合
- B的第一列告诉我们是怎样的一个线性组合
1.3 整行相乘

- A可以看作多个行向量
- C中的第一行是B中的所有行的线性组合
- A的第一行告诉我们是怎样的一个线性组合
1.4 列乘以行
定义:A的列 × B的行
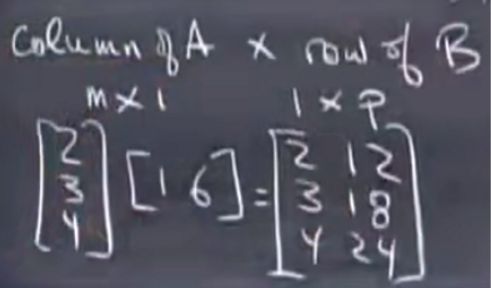
C的每一行都是B的倍数,和B是同一方向,这是行空间(即行所有可能的线性组合,在此处是指[1,6]这条直线,C的所有行都在此直线上)
C的每一列都是A的倍数,和A是同一方向,这是列空间(即列所有可能的线性组合,在此处是指[2,3,4]这条直线,C的所有列都在此直线上)
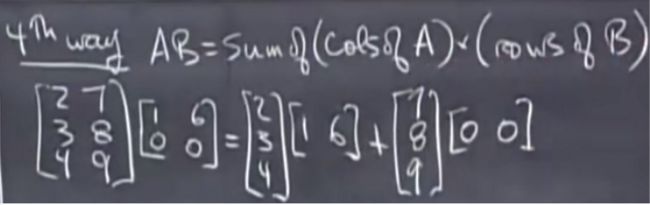
矩阵形式:A的列分别乘以B的行,并求和
1.5 分块乘法
[ A 1 A 2 A 3 A 4 ] [ B 1 B 2 B 3 B 4 ] = [ A 1 B 1 + A 2 B 3 A 1 B 2 + A 2 B 4 A 3 B 1 + A 4 B 3 A 3 B 2 + A 4 B 4 ] \left[\begin{array}{c|c}A_1&A_2\\\hline A_3&A_4\end{array}\right]\left[\begin{array}{c|c}B_1&B_2\\\hline B_3&B_4\end{array}\right]=\left[\begin{array}{c|c}A_1B_1+A_2B_3&A_1B_2+A_2B_4\\\hline A_3B_1+A_4B_3&A_3B_2+A_4B_4\end{array}\right] [A1A3A2A4][B1B3B2B4]=[A1B1+A2B3A3B1+A4B3A1B2+A2B4A3B2+A4B4]
2.逆(方阵)
若存在逆,对于方阵,左逆右逆是相等的,非方阵则不等
矩阵存在逆:可逆的,非奇异的
矩阵不存在逆:不可逆的,奇异的
2.1证明不可逆

方法一:线性组合
若存在B,使A×B = I,因为结果I中的每一列都是A中的每一列的线性组合,且这两列共线,所以不可能得到单位矩阵的第一列[1,0]
方法二:存在非零向量x,使Ax=0
证明:如果对于非零的 x x x仍有 A x = 0 Ax=0 Ax=0,而 A A A有逆 A − 1 A^{-1} A−1,则 A − 1 A x = 0 A^{-1}Ax=0 A−1Ax=0,即 x = 0 x=0 x=0,与题设矛盾,得证。
2.2若矩阵有逆,求逆的方法(高斯·若尔丹Gauss-Jordan法)

求逆实质上就是解方程
分解成两个方程
Gauss-jordan:同时求解多个方程
- 构造这样一个矩阵 [ 1 3 1 0 2 7 0 1 ] \left[\begin{array}{cc|cc}1&3&1&0\\2&7&0&1\end{array}\right] [12371001],接下来用消元法将左侧变为单位矩阵;
- [ 1 3 1 0 2 7 0 1 ] → r o w 2 − 2 r o w 1 [ 1 3 1 0 0 1 − 2 1 ] → r o w 1 − 3 r o w 2 [ 1 0 7 − 3 0 1 − 2 1 ] \left[\begin{array}{cc|cc}1&3&1&0\\2&7&0&1\end{array}\right]\xrightarrow{row_2-2row_1}\left[\begin{array}{cc|cc}1&3&1&0\\0&1&-2&1\end{array}\right]\xrightarrow{row_1-3row_2}\left[\begin{array}{cc|cc}1&0&7&-3\\0&1&-2&1\end{array}\right] [12371001]row2−2row1[10311−201]row1−3row2[10017−2−31]
- 于是,我们就将矩阵从 [ A I ] \left[\begin{array}{c|c}A&I\end{array}\right] [AI]变为 [ I A − 1 ] \left[\begin{array}{c|c}I&A^{-1}\end{array}\right] [IA−1]
证明:高斯-若尔当法的本质是使用消元矩阵 E E E,对 A A A进行操作, E [ A I ] E\left[\begin{array}{c|c}A&I\end{array}\right] E[AI],利用一步步消元有 E A = I EA=I EA=I,进而得到 [ I E ] \left[\begin{array}{c|c}I&E\end{array}\right] [IE],其实这个消元矩阵 E E E就是 A − 1 A^{-1} A−1,而高斯-若尔当法中的 I I I只是负责记录消元的每一步操作,待消元完成,逆矩阵就自然出现了。
第4讲: A A A的 L U LU LU分解
矩阵的逆和转置
为什么逆矩阵要反过来?这就像是…你先把鞋子脱了再脱袜子,那么反过来不就是要先穿上袜子,再穿鞋子吗?所以说,忘记书上的蠢例子吧。
A B AB AB的逆矩阵:
A ⋅ A − 1 = I = A − 1 ⋅ A ( A B ) ⋅ ( B − 1 A − 1 ) = I 则 A B 的逆矩阵为 B − 1 A − 1 转置也如此 \begin{aligned} A \cdot A^{-1} = I & = A^{-1} \cdot A\\ (AB) \cdot (B^{-1}A^{-1}) & = I\\ \textrm{则} AB \textrm{的逆矩阵为} & B^{-1}A^{-1} \end{aligned}\\ \textrm{转置也如此} A⋅A−1=I(AB)⋅(B−1A−1)则AB的逆矩阵为=A−1⋅A=IB−1A−1转置也如此
A T A^{T} AT的逆矩阵:
( A ⋅ A − 1 ) T = I T ( A − 1 ) T ⋅ A T = I 则 A T 的逆矩阵为 ( A − 1 ) T 矩阵的逆符号和转置符号可随意切换 \begin{aligned} (A \cdot A^{-1})^{T} & = I^{T}\\ (A^{-1})^{T} \cdot A^{T} & = I\\ \textrm{则} A^{T} \textrm{的逆矩阵为} & (A^{-1})^{T} \end{aligned}\\ \textrm{矩阵的逆符号和转置符号可随意切换} (A⋅A−1)T(A−1)T⋅AT则AT的逆矩阵为=IT=I(A−1)T矩阵的逆符号和转置符号可随意切换
L U LU LU分解
其实,消元的目的只是为了正确认识矩阵的概念,而LU分解是最基础的矩阵分解。
前提:无主元为0的情况,即没有行交换
L: lower triangular matrix下三角矩阵
U:upper triangular matrix上三角矩阵
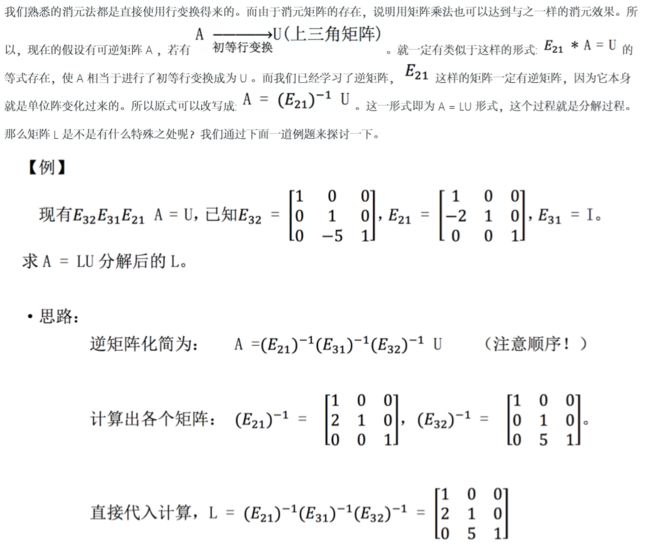

将一个 n n n 阶方阵 A A A 变换为 U U U 需要的计算量估计:
我们需要运算(将一行乘一定倍数后加到另一行上消元,每一个元素进行这样的过程计为 一次运算)多少次之后,才能将其化为上三 角矩阵 U 呢?
-
第一步,将 a 11 a_{11} a11作为主元,需要的运算量约为 n 2 n^2 n2
[ a 11 a 12 ⋯ a 1 n a 21 a 22 ⋯ a 2 n ⋮ ⋮ ⋱ ⋮ a n 1 a n 2 ⋯ a n n ] 消 元 → [ a 11 a 12 ⋯ a 1 n 0 a 22 ⋯ a 2 n 0 ⋮ ⋱ ⋮ 0 a n 2 ⋯ a n n ] \begin{bmatrix} a_{11} & a_{12} & \cdots & a_{1n} \\ a_{21} & a_{22} & \cdots & a_{2n} \\ \vdots & \vdots & \ddots & \vdots \\ a_{n1} & a_{n2} & \cdots & a_{nn} \\ \end{bmatrix} \underrightarrow{消元} \begin{bmatrix} a_{11} & a_{12} & \cdots & a_{1n} \\ 0 & a_{22} & \cdots & a_{2n} \\ 0 & \vdots & \ddots & \vdots \\ 0 & a_{n2} & \cdots & a_{nn} \\ \end{bmatrix} ⎣⎢⎢⎢⎡a11a21⋮an1a12a22⋮an2⋯⋯⋱⋯a1na2n⋮ann⎦⎥⎥⎥⎤消元⎣⎢⎢⎢⎡a11000a12a22⋮an2⋯⋯⋱⋯a1na2n⋮ann⎦⎥⎥⎥⎤ -
以此类推,第二步变为99×99的矩阵,接下来每一步计算量约为 ( n − 1 ) 2 、 ( n − 2 ) 2 、 ⋯ 、 2 2 、 1 2 (n-1)^2、(n-2)^2、\cdots、2^2、1^2 (n−1)2、(n−2)2、⋯、22、12。
-
则将 A A A 变换为 L U LU LU 的总运算量应为 O ( n 2 + ( n − 1 ) 2 + ⋯ + 2 2 + 1 2 ) O(n^2+(n-1)^2+\cdots+2^2+1^2) O(n2+(n−1)2+⋯+22+12),通过微积分的知识可知大约为 O ( n 3 3 ) O(\frac{n^3}{3}) O(3n3)。
置换矩阵(Permutation Matrix):
当主元等于0时,我们需要交换行来选择新的主元,用于交换行的矩阵称为置换矩阵
3阶方阵的置换矩阵有6个:
[ 1 0 0 0 1 0 0 0 1 ] [ 0 1 0 1 0 0 0 0 1 ] [ 0 0 1 0 1 0 1 0 0 ] [ 1 0 0 0 0 1 0 1 0 ] [ 0 1 0 0 0 1 1 0 0 ] [ 0 0 1 1 0 0 0 1 0 ] \begin{bmatrix} 1 & 0 & 0 \\ 0 & 1 & 0 \\ 0 & 0 & 1 \\ \end{bmatrix} \begin{bmatrix} 0 & 1 & 0 \\ 1 & 0 & 0 \\ 0 & 0 & 1 \\ \end{bmatrix} \begin{bmatrix} 0 & 0 & 1 \\ 0 & 1 & 0 \\ 1 & 0 & 0 \\ \end{bmatrix} \begin{bmatrix} 1 & 0 & 0 \\ 0 & 0 & 1 \\ 0 & 1 & 0 \\ \end{bmatrix} \begin{bmatrix} 0 & 1 & 0 \\ 0 & 0 & 1 \\ 1 & 0 & 0 \\ \end{bmatrix} \begin{bmatrix} 0 & 0 & 1 \\ 1 & 0 & 0 \\ 0 & 1 & 0 \\ \end{bmatrix} ⎣⎡100010001⎦⎤⎣⎡010100001⎦⎤⎣⎡001010100⎦⎤⎣⎡100001010⎦⎤⎣⎡001100010⎦⎤⎣⎡010001100⎦⎤
第五个矩阵和第六个矩阵互逆
其余矩阵都跟自己互逆
可以发现置换矩阵的运算构成一个群
置换矩阵的逆 = 置换矩阵的转置
第5讲:转置-置换-向量空间 R R R
置换矩阵(Permutation Matrix)
置换矩阵:行重新排列了的单位矩阵
若A可逆,LU分解中若主元都不为0则我们无需进行行互换,当主元存在0时,我们需要将其与一个合适的行互换来继续LU分解,最后我们会得到
P A = L U PA=LU PA=LU
n n n阶方阵的置换矩阵P有 ( n 1 ) = n ! \binom{n}{1}=n! (1n)=n!个。(全排列)
对置换矩阵 P P P,有 P T P = I P^TP = I PTP=I
即 P T = P − 1 P^T = P^{-1} PT=P−1
转置矩阵(Transpose Matrix)
( A T ) i j = ( A ) j i (A^T)_{ij} = (A)_{ji} (AT)ij=(A)ji
对称矩阵(Symmetric Matrix)
A T A^T AT = A A A
证明:对任意矩阵 R R R有 R T R R^TR RTR为对称矩阵:
( R T R ) T = ( R ) T ( R T ) T = R T R 即 ( R T R ) T = R T R (R^TR)^T = (R)^T(R^T)^T = R^TR\\ \textrm{即}(R^TR)^T = R^TR (RTR)T=(R)T(RT)T=RTR即(RTR)T=RTR
向量空间(Vector Space)
向量空间定义:向量空间中任意向量满足加法和数乘封闭(线性组合)
所有向量空间都必须包含原点(Origin),因为 0 数乘 一个向量 = 零向量
向量子空间
向量空间的子集组成的向量空间
在 R 2 R^2 R2中的向量子空间只能是:
① R 2 R^2 R2本身
②一条线(过零点)
③零向量单独组成的空间
在 R 3 R^3 R3中的向量子空间只能是:
① R 3 R^3 R3本身
②一条线(过零点)
③一个平面(过零点)
④零向量单独组成的空间
R n R^n Rn类推
列空间
让我们以向量空间的方式来观察矩阵,对于矩阵A

取出 A A A的两个列向量,其线性组合即构成了一个向量空间,我们称之为列空间,很明显这是一个在 R 3 R^3 R3内的平面
第6讲:列空间和零空间
对向量空间 S S S和 T T T,有:
1. S ∩ T S \cap T S∩T也是向量空间
证明:
对属于 S ∩ T S \cap T S∩T的向量 x x x,他们的线性组合满足 S S S的运算封闭和 T T T的运算封闭,故其线性组合得到的向量也在 S ∩ T S \cap T S∩T内
2. S ∪ T S ∪ T S∪T不一定是向量空间
列空间
回忆第二课关于矩阵乘法的内容, A x Ax Ax相乘, A A A为矩阵, x x x为向量,二者相乘的结果可以看做是 A A A中列向量的线性组合
由 A A A的列向量线性组合生成的子空间为 A A A的列空间
A x = b Ax=b Ax=b有解当且仅当 b b b属于 A A A的列空间
零空间
A A A的零空间是 A x = 0 Ax=0 Ax=0中 x x x的解组成的集合。
零空间是一个向量空间,证明:
设 x 1 x_1 x1, x 2 x_2 x2在零空间中,
1. A ( x 1 + x 2 ) = A x 1 + A x 2 = 0 A(x_1+x_2)=Ax_1+Ax_2=0 A(x1+x2)=Ax1+Ax2=0,满足
2. A ( k x 1 ) = k A x 1 = 0 A(kx_1)=kAx_1=0 A(kx1)=kAx1=0,对 x 2 x_2 x2同理,满足
对于 A x = b , b ≠ 0 Ax=b,b≠0 Ax=b,b=0的情况,都不是向量空间,因为都不过零点
以上两种子空间的总结:有两种方法构造子空间,
其一是通过A的列向量的线性组合构造列空间,
其二是求解向量必须满足的方程组来构造子空间(通过让 x x x满足特定条件来得到子空间, A x = 0 Ax=0 Ax=0将构造出零空间)
第7讲:求解 A x = 0 Ax=0 Ax=0 主变量 特解
行阶梯矩阵
举例: 3 × 4 3 \times 4 3×4矩阵
A = [ 1 2 2 2 2 4 6 8 3 6 8 10 ] A= \begin{bmatrix} 1 & 2 & 2 & 2\\ 2 & 4 & 6 & 8\\ 3 & 6 & 8 & 10\\ \end{bmatrix} A=⎣⎡1232462682810⎦⎤,求 A x = 0 Ax=0 Ax=0的特解:
找出主变量(pivot variable):
A = [ 1 2 2 2 2 4 6 8 3 6 8 10 ] 消 元 → [ 1 ‾ 2 2 2 0 0 2 ‾ 4 0 0 0 0 ] = U A= \begin{bmatrix} 1 & 2 & 2 & 2\\ 2 & 4 & 6 & 8\\ 3 & 6 & 8 & 10\\ \end{bmatrix} \underrightarrow{消元} \begin{bmatrix} \underline{1} & 2 & 2 & 2\\ 0 & 0 & \underline{2} & 4\\ 0 & 0 & 0 & 0\\ \end{bmatrix} =U A=⎣⎡1232462682810⎦⎤消元⎣⎡100200220240⎦⎤=U
主变量(pivot variable,下划线元素)的个数为2,即矩阵 A A A的秩(rank)为2,即 r = 2 r=2 r=2。
主变量所在的列为主列(pivot column),其余列为自由列(free column)。
自由列中的变量为自由变量(free variable),自由变量的个数为 n − r = 4 − 2 = 2 n-r=4-2=2 n−r=4−2=2。
通常,给自由列变量赋值,去求主列变量的值。如,令 x 2 = 1 , x 4 = 0 x_2=1, x_4=0 x2=1,x4=0求得特解
x = c 1 [ − 2 1 0 0 ] x=c_1\begin{bmatrix}-2\\1\\0\\0\\\end{bmatrix} x=c1⎣⎢⎢⎡−2100⎦⎥⎥⎤;
再令 x 2 = 0 , x 4 = 1 x_2=0, x_4=1 x2=0,x4=1求得特解
x = c 2 [ 2 0 − 2 1 ] x=c_2\begin{bmatrix}2\\0\\-2\\1\\\end{bmatrix} x=c2⎣⎢⎢⎡20−21⎦⎥⎥⎤。
简化行阶梯矩阵
该例还能进一步简化,即 将 U U U矩阵化简为 R R R矩阵(Reduced row echelon form),即简化行阶梯形式。
在简化行阶梯形式中,主元为1,主元上下的元素都是 0 0 0:
U = [ 1 ‾ 2 2 2 0 0 2 ‾ 4 0 0 0 0 ] 化 简 → [ 1 ‾ 2 0 − 2 0 0 1 ‾ 2 0 0 0 0 ] = R U= \begin{bmatrix} \underline{1} & 2 & 2 & 2\\ 0 & 0 & \underline{2} & 4\\ 0 & 0 & 0 & 0\\ \end{bmatrix} \underrightarrow{化简} \begin{bmatrix} \underline{1} & 2 & 0 & -2\\ 0 & 0 & \underline{1} & 2\\ 0 & 0 & 0 & 0\\ \end{bmatrix} =R U=⎣⎡100200220240⎦⎤化简⎣⎡100200010−220⎦⎤=R
将 R R R矩阵中的主变量放在一起,自由变量放在一起(列交换),得到
R = [ 1 ‾ 2 0 − 2 0 0 1 ‾ 2 0 0 0 0 ] 列 交 换 → [ 1 0 2 − 2 0 1 0 2 0 0 0 0 ] = [ I F 0 0 ] ,其中 I 为单位矩阵, F 为自由变量组成的矩阵 R= \begin{bmatrix} \underline{1} & 2 & 0 & -2\\ 0 & 0 & \underline{1} & 2\\ 0 & 0 & 0 & 0\\ \end{bmatrix} \underrightarrow{列交换} \left[ \begin{array}{c c | c c} 1 & 0 & 2 & -2\\ 0 & 1 & 0 & 2\\ \hline 0 & 0 & 0 & 0\\ \end{array} \right]= \begin{bmatrix} I & F \\ 0 & 0 \\ \end{bmatrix} \textrm{,其中}I\textrm{为单位矩阵,}F\textrm{为自由变量组成的矩阵} R=⎣⎡100200010−220⎦⎤列交换⎣⎡100010200−220⎦⎤=[I0F0],其中I为单位矩阵,F为自由变量组成的矩阵
什么样的 x x x满足 R x = 0 Rx = 0 Rx=0 ?
计算零空间矩阵 N N N(null space matrix),其各列为特解,有 R N = 0 RN=0 RN=0。
x p i v o t = − F x f r e e [ I F ] [ x p i v o t x f r e e ] = 0 N = [ − F I ] x_{pivot}=-Fx_{free} \\ \begin{bmatrix} I & F \\ \end{bmatrix} \begin{bmatrix} x_{pivot} \\ x_{free} \\ \end{bmatrix}=0 \\ N=\begin{bmatrix} -F \\ I \\ \end{bmatrix} xpivot=−Fxfree[IF][xpivotxfree]=0N=[−FI]
在本例中
N = [ − 2 2 0 − 2 1 0 0 1 ] N= \begin{bmatrix} -2 & 2 \\ 0 & -2 \\ 1 & 0 \\ 0 & 1 \\ \end{bmatrix} N=⎣⎢⎢⎡−20102−201⎦⎥⎥⎤,与上面求得的两个 x x x特解一致。
另一个例子,矩阵转置后
A = [ 1 2 3 2 4 6 2 6 8 2 8 10 ] 消 元 → [ 1 2 3 0 2 2 0 0 0 0 0 0 ] 化 简 → [ 1 0 1 0 1 1 0 0 0 0 0 0 ] = R A= \begin{bmatrix} 1 & 2 & 3 \\ 2 & 4 & 6 \\ 2 & 6 & 8 \\ 2 & 8 & 10 \\ \end{bmatrix} \underrightarrow{消元} \begin{bmatrix} 1 & 2 & 3 \\ 0 & 2 & 2 \\ 0 & 0 & 0 \\ 0 & 0 & 0 \\ \end{bmatrix} \underrightarrow{化简} \left[ \begin{array}{c c | c} 1 & 0 & 1\\ 0 & 1 & 1\\ \hline 0 & 0 & 0 \\ 0 & 0 & 0 \end{array} \right] =R A=⎣⎢⎢⎡1222246836810⎦⎥⎥⎤消元⎣⎢⎢⎡100022003200⎦⎥⎥⎤化简⎣⎢⎢⎡100001001100⎦⎥⎥⎤=R
矩阵主列的个数与其转置相同,所以矩阵的秩仍为 r = 2 r=2 r=2,有 2 2 2个主变量, 1 1 1个自由变量。
同上一例,取自由变量为 x 3 = 1 x_3=1 x3=1,求得特解
x = c [ − 1 − 1 1 ] x=c \begin{bmatrix} -1 \\ -1 \\ 1 \\ \end{bmatrix} x=c⎣⎡−1−11⎦⎤
第8讲:求解 A x = b Ax=b Ax=b可解性和解的结构
b b b是什么时, A x = b Ax=b Ax=b有解?
b b b在 A A A的列空间内,即 b b b必须是 A A A各列的线性组合
或者说,如果 A A A各行的线性组合得到零行, b b b端分量的同样组合也必须为0
求解 A x = b Ax=b Ax=b算法
①求特解:
将所有自由变量设为0
求解出主元变量
②加上零空间的任意 x x x
对于方程组某解,其与零空间内任意向量之和仍为解:
A ( X p + X n ) = b A(X_p+X_n)=b A(Xp+Xn)=b
举例,同上一讲: 3 × 4 3 \times 4 3×4矩阵
A = [ 1 2 2 2 2 4 6 8 3 6 8 10 ] A= \begin{bmatrix} 1 & 2 & 2 & 2\\ 2 & 4 & 6 & 8\\ 3 & 6 & 8 & 10\\ \end{bmatrix} A=⎣⎡1232462682810⎦⎤,求 A x = b Ax=b Ax=b的特解:
写出其增广矩阵(augmented matrix) [ A b ] \left[\begin{array}{c|c}A & b\end{array}\right] [Ab]:
[ 1 2 2 2 b 1 2 4 6 8 b 2 3 6 8 10 b 3 ] 消 元 → [ 1 2 2 2 b 1 0 0 2 4 b 2 − 2 b 1 0 0 0 0 b 3 − b 2 − b 1 ] \left[ \begin{array}{c c c c|c} 1 & 2 & 2 & 2 & b_1 \\ 2 & 4 & 6 & 8 & b_2 \\ 3 & 6 & 8 & 10 & b_3 \\ \end{array} \right] \underrightarrow{消元} \left[ \begin{array}{c c c c|c} 1 & 2 & 2 & 2 & b_1 \\ 0 & 0 & 2 & 4 & b_2-2b_1 \\ 0 & 0 & 0 & 0 & b_3-b_2-b_1 \\ \end{array} \right] ⎣⎡1232462682810b1b2b3⎦⎤消元⎣⎡100200220240b1b2−2b1b3−b2−b1⎦⎤
有解的必要条件为 b 3 − b 2 − b 1 = 0 b_3-b_2-b_1=0 b3−b2−b1=0。
假设 b = [ 1 5 6 ] b=\begin{bmatrix} 1 \\ 5 \\ 6 \end{bmatrix} b=⎣⎡156⎦⎤
解法:令所有自由变量取 0 0 0,求得特解
x p = [ − 2 0 3 2 0 ] x_p= \begin{bmatrix} -2 \\ 0 \\ \frac{3}{2} \\ 0 \end{bmatrix} xp=⎣⎢⎢⎡−20230⎦⎥⎥⎤。
A x = b Ax=b Ax=b的解集为其特解加上零空间,对本例有:
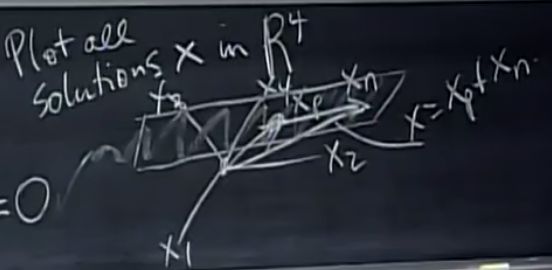
x c o m p l e t e = [ − 2 0 3 2 0 ] + c 1 [ − 2 1 0 0 ] + c 2 [ 2 0 − 2 1 ] x_{complete}= \begin{bmatrix} -2 \\ 0 \\ \frac{3}{2} \\ 0 \end{bmatrix} + c_1\begin{bmatrix}-2\\1\\0\\0\\\end{bmatrix} + c_2\begin{bmatrix}2\\0\\-2\\1\\\end{bmatrix} xcomplete=⎣⎢⎢⎡−20230⎦⎥⎥⎤+c1⎣⎢⎢⎡−2100⎦⎥⎥⎤+c2⎣⎢⎢⎡20−21⎦⎥⎥⎤
图像大致如此,为四维空间中一不过原点的平面:
对秩为 r r r的 m × n m×n m×n矩阵 A A A的解讨论
对于 m × n m \times n m×n矩阵 A A A,有矩阵 A A A的秩 r ≤ m i n ( m , n ) r \leq min(m, n) r≤min(m,n)
①列满秩 r = n r=n r=n情况:
每一列都有主元
r a n k ( A ) = 2 rank(A)=2 rank(A)=2,没有自由变量,所以零空间中只有零向量
全体解 = 特解 + 零空间
b b b取 A A A中各列的线性组合才有解,并且这个解唯一
所以要么有0个解,要么1个解
A = [ 1 3 2 1 6 1 5 1 ] A= \begin{bmatrix} 1 & 3 \\ 2 & 1 \\ 6 & 1 \\ 5 & 1 \\ \end{bmatrix} A=⎣⎢⎢⎡12653111⎦⎥⎥⎤
该例中,若b = [ 4 3 7 6 ] \begin{bmatrix} 4 \\ 3 \\ 7 \\ 6 \\ \end{bmatrix} ⎣⎢⎢⎡4376⎦⎥⎥⎤
则有唯一解, x = [ 1 1 ] x = \begin{bmatrix} 1 \\ 1 \\ \end{bmatrix} x=[11]
②行满秩 r = m r=m r=m情况:
每一行都有主元,没有零行
A = [ 1 2 6 5 3 1 1 1 ] A= \begin{bmatrix} 1 & 2 & 6 & 5 \\ 3 & 1 & 1 & 1 \\ \end{bmatrix} A=[13216151]
r a n k ( A ) = 2 rank(A)=2 rank(A)=2, ∀ b ∈ R m 都 有 x ≠ 0 的 解 \forall b \in R^m都有x \neq 0的解 ∀b∈Rm都有x=0的解,因为此时 A A A的列空间为 R m R^m Rm, b ∈ R m b \in R^m b∈Rm恒成立,假如r
③行列满秩情况: r = m = n r=m=n r=m=n
是一可逆方阵
如,
A = [ 1 2 3 4 ] A= \begin{bmatrix} 1 & 2 \\ 3 & 4 \\ \end{bmatrix} A=[1324]
则 A A A最终可以化简为 R = I R=I R=I,其零空间只包含 0 0 0向量。
同时包含行满秩和列满秩的特点,即无论 b b b为何值,都有解,且这个解唯一
④一般情况: r < m , r < n r
b分量可能不符合0=0,则有0个解
否则,n-r>0,组成 A A A的零空间的自由变量有n-r个,有无穷多的解
总结:
r = m = n r = n < m r = m < n r < m , r < n R = I R = [ I 0 ] R = [ I F ] R = [ I F 0 0 ] 1 s o l u t i o n 0 o r 1 s o l u t i o n ∞ s o l u t i o n 0 o r ∞ s o l u t i o n \begin{array}{c|c|c|c}r=m=n&r=n\lt m&r=m\lt n&r\lt m,r\lt n\\R=I&R=\begin{bmatrix}I\\0\end{bmatrix}&R=\begin{bmatrix}I&F\end{bmatrix}&R=\begin{bmatrix}I&F\\0&0\end{bmatrix}\\1\ solution&0\ or\ 1\ solution&\infty\ solution&0\ or\ \infty\ solution\end{array} r=m=nR=I1 solutionr=n<mR=[I0]0 or 1 solutionr=m<nR=[IF]∞ solutionr<m,r<nR=[I0F0]0 or ∞ solution
第9讲:线性相关性、基、维数
线性相关性
前言知识:
m < n m
m<n ,即未知数 x x x的个数 > 方程的个数时,
零空间不止包含零向量,存在自由变量
存在 A x = 0 Ax=0 Ax=0的非零解
结论:
当向量(向量组) v 1 , v 2 , v 3 . . . v n v_1,v_2,v_3...v_n v1,v2,v3...vn是矩阵 A A A的列向量,
① 他们是线性无关的,当且仅当:
零空间角度: A A A的零空间只有零
秩的角度: r = n r=n r=n(无自由变量)
② 他们是线性相关的,当且仅当:
零空间角度: A A A的零空间除零向量外还存在其他向量
秩的角度: r < n r
基
生成:指一些向量的所有线性组合
向量空间 S S S中的一组基(basis),具有两个性质:
- 他们线性无关;
- 他们可以生成 S S S。
对于向量空间 R n \mathbb{R}^n Rn,如果 n n n个向量组成的矩阵为可逆矩阵,则这 n n n个向量为该空间的一组基。
对于给定一空间,基向量个数相等
维数
对于给定一空间,其基向量个数被称为维数(dimension)
举例:
A = [ 1 2 3 1 1 1 2 1 1 2 3 1 ] A= \begin{bmatrix} 1 & 2 & 3 & 1 \\ 1 & 1 & 2 & 1 \\ 1 & 2 & 3 & 1 \\ \end{bmatrix} A=⎣⎡111212323111⎦⎤
A的列向量线性相关,其零空间中有非零向量
2 = r a n k ( A ) = 主 列 的 个 数 = 列 空 间 维 数 2=rank(A)=主列的个数=列空间维数 2=rank(A)=主列的个数=列空间维数
可以很容易的求得 A x = 0 Ax=0 Ax=0的两个解,如
x 1 = [ − 1 − 1 1 0 ] , x 2 = [ − 1 0 0 1 ] x_1= \begin{bmatrix} -1 \\ -1 \\ 1 \\ 0 \\ \end{bmatrix}, x_2= \begin{bmatrix} -1 \\ 0 \\ 0 \\ 1 \\ \end{bmatrix} x1=⎣⎢⎢⎡−1−110⎦⎥⎥⎤,x2=⎣⎢⎢⎡−1001⎦⎥⎥⎤
n − r a n k ( A ) = 2 = 自 由 变 量 存 在 的 列 数 = 零 空 间 维 数 n-rank(A)=2=自由变量存在的列数=零空间维数 n−rank(A)=2=自由变量存在的列数=零空间维数
我们得到:列空间维数 d i m C ( A ) = r a n k ( A ) dim C(A)=rank(A) dimC(A)=rank(A),零空间维数 d i m N ( A ) = n − r a n k ( A ) dim N(A)=n-rank(A) dimN(A)=n−rank(A)
第10讲:四个基本子空间
| 子空间 | 记号 | 属于 | 维数 | 基 |
|---|---|---|---|---|
| 列空间 | C ( A ) C(A) C(A) | R m \mathbb{R}^m Rm | r | 所有主列 |
| 零空间 | N ( A ) N(A) N(A) | R n \mathbb{R}^n Rn | n-r | 所有特殊解(这里不是指特解,而是一般解,特解叫特定解) |
| 行空间 | C ( A T ) C(A^T) C(AT) | R n \mathbb{R}^n Rn | r | 行最简形的前r行,详见例1 |
| 左零空间 | N ( A T ) N(A^T) N(AT) | R m \mathbb{R}^m Rm | m-r | 用E记录把 A A A化作 R R R的过程,R为零行所对应的E即为基,详见例2 |
列空间( C ( A ) C(A) C(A))
列向量的所有线性组合组成的空间
零空间( N ( A ) N(A) N(A))
自由元所在的列即可组成零空间的一组基。
行空间( C ( A T ) C(A^T) C(AT))
行的所有组合组成的空间,也可以看作 A T A^T AT的列空间
左零空间( N ( A T ) N(A^T) N(AT))
对于左零空间,有 A T y = 0 → ( A T y ) T = 0 T → y T A = 0 T A^Ty=0 \rightarrow (A^Ty)^T=0^T\rightarrow y^TA=0^T ATy=0→(ATy)T=0T→yTA=0T,因此得名。
例子
例1,对于行空间
A = [ 1 2 3 1 1 1 2 1 1 2 3 1 ] 消 元 、 化 简 → [ 1 0 1 1 0 1 1 0 0 0 0 0 ] = R A= \begin{bmatrix} 1 & 2 & 3 & 1 \\ 1 & 1 & 2 & 1 \\ 1 & 2 & 3 & 1 \\ \end{bmatrix} \underrightarrow{消元、化简} \begin{bmatrix} 1 & 0 & 1 & 1 \\ 0 & 1 & 1 & 0 \\ 0 & 0 & 0 & 0 \\ \end{bmatrix} =R A=⎣⎡111212323111⎦⎤消元、化简⎣⎡100010110100⎦⎤=R
由于我们做了行变换,本质是行向量进行线性组合,A的列空间受到影响, C ( R ) ≠ C ( A ) C(R) \neq C(A) C(R)=C(A),而行变换并不影响行空间,所以可以在 R R R中看出前两行就是行空间的一组基。
所以,可以得出无论对于矩阵 A A A还是 R R R,其行空间的一组基,可以由 R R R矩阵的前 r r r行向量组成(这里的 R R R就是第七讲提到的简化行阶梯形式)。
例2,对于左零空间,有 A T y = 0 → ( A T y ) T = 0 T → y T A = 0 T A^Ty=0 \rightarrow (A^Ty)^T=0^T\rightarrow y^TA=0^T ATy=0→(ATy)T=0T→yTA=0T,因此得名。
采用Gauss-Jordan消元,将增广矩阵 [ A m × n I m × m ] \left[\begin{array}{c|c}A_{m \times n} & I_{m \times m}\end{array}\right] [Am×nIm×m]中 A A A的部分划为简化行阶梯形式 [ R m × n E m × m ] \left[\begin{array}{c|c}R_{m \times n} & E_{m \times m}\end{array}\right] [Rm×nEm×m],此时矩阵 E E E会将所有的行变换记录下来。
则 E A = R EA=R EA=R,而在前几讲中,有当 A ′ A' A′是 m m m阶可逆方阵时, R ′ R' R′即是 I I I,所以 E E E就是 A − 1 A^{-1} A−1。
本例中
[ A m × n I m × m ] = [ 1 2 3 1 1 0 0 1 1 2 1 0 1 0 1 2 3 1 0 0 1 ] 消 元 、 化 简 → [ 1 0 1 1 − 1 2 0 0 1 1 0 1 − 1 0 0 0 0 0 − 1 0 1 ] = [ R m × n E m × m ] \left[\begin{array}{c|c}A_{m \times n} & I_{m \times m}\end{array}\right]= \left[ \begin{array} {c c c c|c c c} 1 & 2 & 3 & 1 & 1 & 0 & 0 \\ 1 & 1 & 2 & 1 & 0 & 1 & 0 \\ 1 & 2 & 3 & 1 & 0 & 0 & 1 \\ \end{array} \right] \underrightarrow{消元、化简} \left[ \begin{array} {c c c c|c c c} 1 & 0 & 1 & 1 & -1 & 2 & 0 \\ 0 & 1 & 1 & 0 & 1 & -1 & 0 \\ 0 & 0 & 0 & 0 & -1 & 0 & 1 \\ \end{array} \right] =\left[\begin{array}{c|c}R_{m \times n} & E_{m \times m}\end{array}\right] [Am×nIm×m]=⎣⎡111212323111100010001⎦⎤消元、化简⎣⎡100010110100−11−12−10001⎦⎤=[Rm×nEm×m]
则
E A = [ − 1 2 0 1 − 1 0 − 1 0 1 ] ⋅ [ 1 2 3 1 1 1 2 1 1 2 3 1 ] = [ 1 0 1 1 0 1 1 0 0 0 0 0 ] = R EA= \begin{bmatrix} -1 & 2 & 0 \\ 1 & -1 & 0 \\ -1 & 0 & 1 \\ \end{bmatrix} \cdot \begin{bmatrix} 1 & 2 & 3 & 1 \\ 1 & 1 & 2 & 1 \\ 1 & 2 & 3 & 1 \\ \end{bmatrix}= \begin{bmatrix} 1 & 0 & 1 & 1 \\ 0 & 1 & 1 & 0 \\ 0 & 0 & 0 & 0 \\ \end{bmatrix} =R EA=⎣⎡−11−12−10001⎦⎤⋅⎣⎡111212323111⎦⎤=⎣⎡100010110100⎦⎤=R
很明显,式中 E E E的最后一行对 A A A的行做线性组合后,得到 R R R的最后一行,即 0 0 0向量,也就是 y T A = 0 T y^TA=0^T yTA=0T。
矩阵空间
最后,引入矩阵空间的概念,矩阵可以同向量一样,做求和、数乘。
矩阵也满足向量空间的八大运算律
就像把 R n {R}^n Rn延伸到 R n × n {R}^{n×n} Rn×n
举例,设所有 3 × 3 3 \times 3 3×3矩阵组成的矩阵空间为 M M M。则上三角矩阵、对称矩阵、对角矩阵(前两者的交集)是其子空间。
观察一下对角矩阵,如果取
[ 1 0 0 0 0 0 0 0 0 ] [ 1 0 0 0 3 0 0 0 0 ] [ 0 0 0 0 0 0 0 0 7 ] \begin{bmatrix} 1 & 0 & 0 \\ 0 & 0 & 0 \\ 0 & 0 & 0 \\ \end{bmatrix} \quad \begin{bmatrix} 1 & 0 & 0 \\ 0 & 3 & 0 \\ 0 & 0 & 0 \\ \end{bmatrix} \quad \begin{bmatrix} 0 & 0 & 0 \\ 0 & 0 & 0 \\ 0 & 0 & 7 \\ \end{bmatrix} ⎣⎡100000000⎦⎤⎣⎡100030000⎦⎤⎣⎡000000007⎦⎤
可以发现,任何三阶对角矩阵均可用这三个矩阵的线性组合生成,因此,他们生成了三阶对角矩阵空间,即这三个矩阵是三阶对角矩阵空间的一组基。
第11讲:矩阵空间、秩1矩阵和小世界图
矩阵空间
不要在意矩阵与矩阵之间的乘法,仅考虑矩阵加法和数乘
使用 3 × 3 3 \times 3 3×3矩阵举例,其矩阵空间记为 M M M。
则 M M M的一组基为:
[ 1 0 0 0 0 0 0 0 0 ] [ 0 1 0 0 0 0 0 0 0 ] [ 0 0 1 0 0 0 0 0 0 ] [ 0 0 0 1 0 0 0 0 0 ] [ 0 0 0 0 1 0 0 0 0 ] [ 0 0 0 0 0 1 0 0 0 ] [ 0 0 0 0 0 0 1 0 0 ] [ 0 0 0 0 0 0 0 1 0 ] [ 0 0 0 0 0 0 0 0 1 ] \begin{bmatrix} 1 & 0 & 0 \\ 0 & 0 & 0 \\ 0 & 0 & 0 \\ \end{bmatrix} \begin{bmatrix} 0 & 1 & 0 \\ 0 & 0 & 0 \\ 0 & 0 & 0 \\ \end{bmatrix} \begin{bmatrix} 0 & 0 & 1 \\ 0 & 0 & 0 \\ 0 & 0 & 0 \\ \end{bmatrix} \\ \begin{bmatrix} 0 & 0 & 0 \\ 1 & 0 & 0 \\ 0 & 0 & 0 \\ \end{bmatrix} \begin{bmatrix} 0 & 0 & 0 \\ 0 & 1 & 0 \\ 0 & 0 & 0 \\ \end{bmatrix} \begin{bmatrix} 0 & 0 & 0 \\ 0 & 0 & 1 \\ 0 & 0 & 0 \\ \end{bmatrix} \\ \begin{bmatrix} 0 & 0 & 0 \\ 0 & 0 & 0 \\ 1 & 0 & 0 \\ \end{bmatrix} \begin{bmatrix} 0 & 0 & 0 \\ 0 & 0 & 0 \\ 0 & 1 & 0 \\ \end{bmatrix} \begin{bmatrix} 0 & 0 & 0 \\ 0 & 0 & 0 \\ 0 & 0 & 1 \\ \end{bmatrix} \\ ⎣⎡100000000⎦⎤⎣⎡000100000⎦⎤⎣⎡000000100⎦⎤⎣⎡010000000⎦⎤⎣⎡000010000⎦⎤⎣⎡000000010⎦⎤⎣⎡001000000⎦⎤⎣⎡000001000⎦⎤⎣⎡000000001⎦⎤
易得, d i m M = 9 dim M=9 dimM=9。
一些子空间
对称矩阵S (symmetric)
对于对称矩阵,由于其对角线有三个线性无关元素,左上角的三个元素与右下角三个元素有线性关系,其维度dimension为6
上三角矩阵U (upper triangular)
对角线以下全为0,对角线以上6个元素可以线性无关,维度dimension为6。
矩阵空间的交与和
对于对称矩阵空间 S S S和上三角矩阵空间 U U U,其交集 S ∩ U S∩U S∩U为对角矩阵,维数是3
S + U S+U S+U指,属于 S S S的任一矩阵与属于 U U U的任一矩阵的和
S ∪ U S∪U S∪U并不构成子空间,相对于 S ∪ U S∪U S∪U,我们对 S + U S+U S+U更感兴趣
因为 S ∪ U S∪U S∪U只是简单地把 S S S和 U U U放在了一起,而我们更感兴趣的 S + U S+U S+U,它不仅包括放在一起的部分,还包 S S S和 U U U拓展的部分,其维数为9
已知:
d i m ( S ) = 6 , d i m ( U ) = 6 d i m ( S ∩ U ) = 3 , d i m ( S + U ) = 9 6 + 6 = 3 + 9 dim(S)=6,dim(U)=6 \\ dim(S∩U)=3,dim(S+U)=9 \\ 6 + 6 = 3 + 9 dim(S)=6,dim(U)=6dim(S∩U)=3,dim(S+U)=96+6=3+9
引出性质:
d i m ( S ) + d i m ( U ) = d i m ( S ∩ U ) + d i m ( S + U ) dim(S) + dim(U) = dim(S∩U) + dim(S+U) dim(S)+dim(U)=dim(S∩U)+dim(S+U)
微分方程例子
线性代数,基,维度等概念,不局限于向量和矩阵
函数也可以看作是向量,因为可以对他们做加法,数乘,线性组合
d 2 y d x 2 + y = 0 \frac{d^2y}{dx^2}+y=0 dx2d2y+y=0,即 y ′ ′ + y = 0 y''+y=0 y′′+y=0
求这个方程的解就是在找 A x = 0 Ax=0 Ax=0一个零空间
方程的解有: y = cos x , y = sin x , y = e i x , y = e − i x y=\cos{x}, \quad y=\sin{x}, \quad y=e^{ix}, \quad y=e^{-ix} y=cosx,y=sinx,y=eix,y=e−ix等等( e i x = cos x + i sin x , e − i x = cos x − i sin x e^{ix}=\cos{x}+i\sin{x}, \quad e^{-ix}=\cos{x}-i\sin{x} eix=cosx+isinx,e−ix=cosx−isinx)
而该方程的所有解: y = c 1 cos x + c 2 sin x y=c_1 \cos{x} + c_2 \sin{x} y=c1cosx+c2sinx。
所以,该方程的零空间(即解空间)的一组基为 cos x , sin x \cos{x}, \sin{x} cosx,sinx,零空间的维数为 2 2 2。同理 e i x , e − i x e^{ix}, e^{-ix} eix,e−ix可以作为另一组基。
秩1矩阵
秩1矩阵的分解
秩1矩阵分解为主列和主行向量
2 × 3 2 \times 3 2×3矩阵 A = [ 1 4 5 2 8 10 ] = [ 1 2 ] [ 1 4 5 ] A=\begin{bmatrix}1&4&5\\2&8&10\end{bmatrix}=\begin{bmatrix}1\\2\end{bmatrix}\begin{bmatrix}1&4&5\end{bmatrix} A=[1248510]=[12][145]。
且 d i m C ( A ) = 1 = d i m C ( A T ) dimC(A)=1=dimC(A^T) dimC(A)=1=dimC(AT),所有的秩一矩阵都可以划为 A = U V T A=UV^T A=UVT的形式,这里的 U , V U, V U,V均为列向量。
秩一矩阵类似“积木”,可以搭建任何矩阵,如对于一个 5 × 17 5 \times 17 5×17秩为 4 4 4的矩阵,只需要 4 4 4个秩一矩阵就可以组合出来。
问题1:所有的秩4的 5 × 17 5×17 5×17矩阵能构成一个子空间吗
令 M M M代表所有 5 × 17 5 \times 17 5×17, M M M中所有秩 4 4 4矩阵组成的集合并不是一个子空间
一 般 来 说 , 两 个 矩 阵 之 和 的 秩 ≤ 两 个 矩 阵 的 秩 之 和 一般来说,两个矩阵之和的秩 ≤ 两个矩阵的秩之和 一般来说,两个矩阵之和的秩≤两个矩阵的秩之和
两个秩 4 4 4矩阵相加,其结果并不一定是秩四矩阵。
同理,两个秩1矩阵相加,其结果不一定是秩1矩阵,可能会是秩2矩阵。于是就有了矩阵分解成秩1矩阵的可能性。
问题2:取 R 4 \mathbb{R}^4 R4中满足 v 1 + v 2 + v 3 + v 4 = 0 v_1+v_2+v_3+v_4=0 v1+v2+v3+v4=0的所有向量。能组成一个向量子空间吗?
现在,在 R 4 \mathbb{R}^4 R4空间中有向量 v = [ v 1 v 2 v 3 v 4 ] v=\begin{bmatrix}v_1\\v_2\\v_3\\v_4\end{bmatrix} v=⎣⎢⎢⎡v1v2v3v4⎦⎥⎥⎤,取 R 4 \mathbb{R}^4 R4中满足 v 1 + v 2 + v 3 + v 4 = 0 v_1+v_2+v_3+v_4=0 v1+v2+v3+v4=0的所有向量组成一个向量空间 S S S
则 S S S是一个向量子空间。
证明:
易看出,不论是使用系数乘以该向量,或是用两个满足条件的向量相加,其结果仍然满足 v 1 + v 2 + v 3 + v 4 = 0 v_1+v_2+v_3+v_4=0 v1+v2+v3+v4=0,落在分量和为零的向量空间中。
求子空间 S S S
求 S S S的维数:
从另一个角度看, v 1 + v 2 + v 3 + v 4 = 0 v_1+v_2+v_3+v_4=0 v1+v2+v3+v4=0等价于 [ 1 1 1 1 ] [ v 1 v 2 v 3 v 4 ] = 0 \begin{bmatrix}1&1&1&1\end{bmatrix}\begin{bmatrix}v_1\\v_2\\v_3\\v_4\end{bmatrix}=0 [1111]⎣⎢⎢⎡v1v2v3v4⎦⎥⎥⎤=0,则 S S S就是 A = [ 1 1 1 1 ] A=\begin{bmatrix}1&1&1&1\end{bmatrix} A=[1111]的零空间。
r a n k ( A ) = 1 rank(A)=1 rank(A)=1,则对其零空间有 r a n k ( N ( A ) ) = n − r = 3 = d i m N ( A ) rank(N(A))=n-r=3=dim N(A) rank(N(A))=n−r=3=dimN(A),则 S S S的维数是 3 3 3。
顺便看一下 1 × 4 1 \times 4 1×4矩阵 A A A的四个基本子空间:
行空间: d i m C ( A T ) = 1 dim C(A^T)=1 dimC(AT)=1,其中的一组基是 [ 1 1 1 1 ] \begin{bmatrix}1\\1\\1\\1\end{bmatrix} ⎣⎢⎢⎡