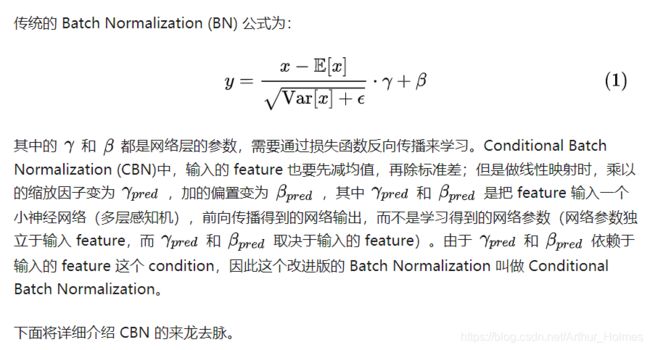
Conditional Batch Normalization 详解(SFT思路来源)
Conditional Batch Normalization 的概念来源于这篇文章:Modulating early visual processing by language 。后来又先后被用在 cGANs With Projection Discriminator 和Self-Attention Generative Adversarial Networks 。本文将首先简略介绍 Modulating early visual processing by language ,接着结合 Self-Attention GANs 的 pytorch 代码,详细分析 categorical conditional Batch Normalization 的具体实现。
太长不看版
Modulating early visual processing by language
这篇文章改进了一个基于图片的问答系统 (VQA: Visual Question Answering)。系统的输入为一张图片和一个针对图片的问题,系统输出问题的答案,如下图所示:
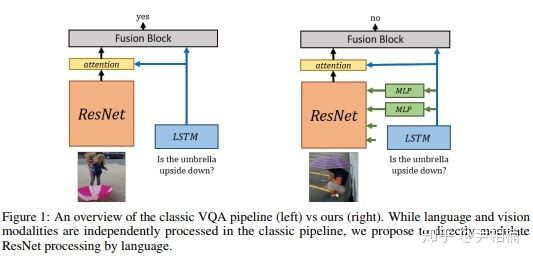
这类系统通常是这样设计的:一个预训练的图像识别网络,例如 ResNet,用于提取图片特征;一个 sequential 模型,例如 LSTM、GRU 等,用于提取句子的特征,并根据句子预测应该关注图片的什么位置(attention);将语言特征、由 attention 加权过后的图片特征结合起来,共同输入一个网络,最终输出问题的答案。
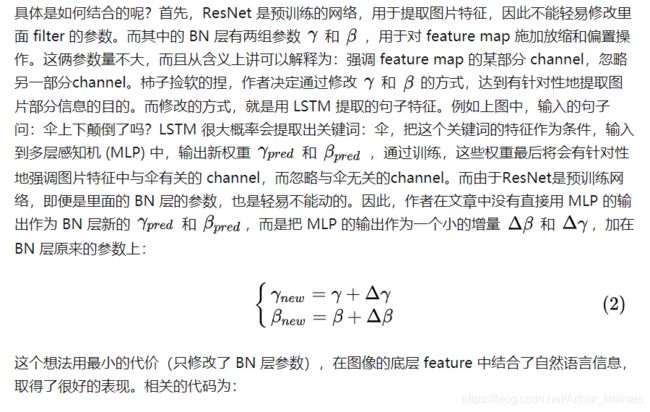
上图左侧为传统的 VQA 系统,我们发现,LSTM 提取的特征只在 ResNet 的顶层才和图片特征结合起来,因为通常意义上讲,神经网络的底层提取的是基础的几何特征,顶层是有具体含义的语义特征,因此,应该把语言模型提取的句子特征在网络顶层和图片特征结合。然而,作者认为,底层的图片特征也应该结合语言特征。理由是,神经科学证明:语言会帮助图片识别。例如,如果事先告诉一个人关于图片的内容,然后再让他看图片,那么这个人识别图片的速度会大大加快。因此,作者首创了将图片底层信息和语言信息结合的模型,如上图右侧所示。
https://github.com/ap229997/Conditional-Batch-Norm/blob/master/model/cbn.pygithub.com
Categorical Conditional Batch Normalization
在 conditional generative model 里面,存在一个隐隐让人不安的问题:一个 batch 里面不同类别的训练数据,放在一起做 Batch Normalization 不太妥当。因为不同类别的数据理应对应不同的均值和方差,其归一化、放缩、偏置也应该不同。针对这个问题,一个解决方案是不再考虑整个 batch 的统计特征,各个图像只在自己的 feature map 内部归一化,例如采用 Instance Normalization 和 Layer Normalization 来代替 BN。但是这些替代品的表现都不如 BN 稳定,接受程度不如 BN 高。
这时我们想到了上一节中介绍的 conditional BN。CBN 以 LSTM 提取的自然语言特征作为 condition,预测 BN 层参数的增量,达到对不同的输入,都有相对应的归一化参数。既然自然语言特征可以作为 condition,用于预测 BN 参数的变化,那么图片的类别信息自然也可以作为 condition 来预测 BN 层的参数。因此 cGANs With Projection Discriminator 和 Self-Attention GANs 借鉴了 CBN 里面的 condition 的思想,稍加修改,用在了自己的 conditional GAN 模型中。

接下来我们将研究其具体的实现,代码来自:
https://github.com/crcrpar/pytorch.sngan_projection/blob/master/links/conditional_batchnorm.pygithub.com
class ConditionalBatchNorm2d(nn.BatchNorm2d):
"""Conditional Batch Normalization"""
def __init__(self, num_features, eps=1e-05, momentum=0.1,
affine=False, track_running_stats=True):
super(ConditionalBatchNorm2d, self).__init__(
num_features, eps, momentum, affine, track_running_stats
)
def forward(self, input, weight, bias, **kwargs):
self._check_input_dim(input)
exponential_average_factor = 0.0
if self.training and self.track_running_stats:
self.num_batches_tracked += 1
if self.momentum is None: # use cumulative moving average
exponential_average_factor = 1.0 / self.num_batches_tracked.item()
else: # use exponential moving average
exponential_average_factor = self.momentum
output = F.batch_norm(input, self.running_mean, self.running_var,
self.weight, self.bias,
self.training or not self.track_running_stats,
exponential_average_factor, self.eps)
if weight.dim() == 1:
weight = weight.unsqueeze(0)
if bias.dim() == 1:
bias = bias.unsqueeze(0)
size = output.size()
weight = weight.unsqueeze(-1).unsqueeze(-1).expand(size)
bias = bias.unsqueeze(-1).unsqueeze(-1).expand(size)
return weight * output + bias
我们看到,这个 ConditionalBatchNorm2d类,继承自 pytorch 的 BatchNorm2d类,对比这个代码和官方的 BatchNorm2d 的代码,发现其构造函数的参数和BatchNorm2d完全相同,构造函数中直接调用了基类,也就是BatchNorm2d的构造函数。而 forward函数中,多了weight和bias两个参数。forward的代码大部分也是直接 copy 自 BatchNorm2d的基类_BatchNorm的代码,无非是设置一下 moving average 的 momentum,记录一下总共读取了多少个 batch,以便在没有设置 momentum 的情况下,在全体样本上计算均值和方差。直到调用官方的底层 C 函数库 F.batch_norm,代码完全没有对_BatchNorm类的forward函数做出任何修改,其output 就是对输入的 feature map 做了一次 BatchNorm2d。 真正修改的是后面加的几行:
if weight.dim() == 1:
weight = weight.unsqueeze(0)
if bias.dim() == 1:
bias = bias.unsqueeze(0)
size = output.size()
weight = weight.unsqueeze(-1).unsqueeze(-1).expand(size)
bias = bias.unsqueeze(-1).unsqueeze(-1).expand(size)
return weight * output + bias 这里用到了forward函数参数中的 weight和bias。由于是在图像 feature 上操作,需要对 weight 和 bias 的维度做一些改变,使其与 feature map output的维度相同。最后代码返回weight*output+bias 。似乎很 naive,可是说好的 condition 呢?说好的 categorical 信息呢?别着急,它们都隐藏在 weight和bias中。这个类只不过是个基类,下面的类才是真正要用到的类:
class CategoricalConditionalBatchNorm2d(ConditionalBatchNorm2d):
def __init__(self, num_classes, num_features, eps=1e-5, momentum=0.1,
affine=False, track_running_stats=True):
super(CategoricalConditionalBatchNorm2d, self).__init__(
num_features, eps, momentum, affine, track_running_stats
)
self.weights = nn.Embedding(num_classes, num_features)
self.biases = nn.Embedding(num_classes, num_features)
self._initialize()
def _initialize(self):
init.ones_(self.weights.weight.data)
init.zeros_(self.biases.weight.data)
def forward(self, input, c, **kwargs):
weight = self.weights(c)
bias = self.biases(c)
return super(CategoricalConditionalBatchNorm2d, self).forward(
input, weight, bias)这个类的构造函数中比它的基类多加了一项num_classes。构造函数中,首先调用了它的基类,也就是ConditionalBatchNorm2d的构造函数,用于初始化大部分参数。接下来设置了两个网络层:
self.weights = nn.Embedding(num_classes, num_features)
self.biases = nn.Embedding(num_classes, num_features)nn.Embedding层的作用是,把图片的 label 转换成 dense 向量,而不像 one-hot-encoding,只能把 label 转换成稀疏向量。nn.Embedding的第一个参数表示总共有多少个类,第二个参数表示每个 label 映射成多少维的向量。这个网络层的好处是,可以任意指定 label vector 的 dimension,它的本质是一个 num_classes行num_feature列的矩阵,这个矩阵的参数随着网络的训练不断更新。前向传播时,label 是几就取第几行的向量出来,用以表示这个 label。其实这个 Embedding 相当于把 one-hot encoding 输入一个 bias 为 0 的 linear layer。
在构造函数的最后,通过调用 self._initialize初始化 self.weights 和 self.bias,分别把它们初始化为全 1 和全 0。这样在网络训练的初期,这俩相当于不存在一样,整个类就是一个BatchNorm2d。
接下来看前向传播函数:
def forward(self, input, c, **kwargs):
weight = self.weights(c)
bias = self.biases(c)
return super(CategoricalConditionalBatchNorm2d, self).forward(
input, weight, bias)这个函数也很简单,输入 feature map input和类别标签c,注意c 应该是 LongTensor 格式的,否则会报错。接下来,根据 c 挑出 weights embedding 层和 biases embedding 层中的第c行,作为 weight 和 bias 输入基类的前向传播函数,最终得到 Conditional Batch Normalization 的输出。这个 categorical condition 发挥作用的阶段,就是 embedding 的阶段。

总结
提出 conditional Batch Normalization 这一思想的论文 Modulating early visual processing by language,是为了解决特定问题:即在预训练 ResNet 提取的图片底层信息中,融合进自然语言信息,用于辅助图片信息的提取。
而后面的 cGANs With Projection Discriminator 和Self-Attention Generative Adversarial Networks 则是利用 condition 的思想,把图片的 categorical 信息用来指导生成 BN 层的映射参数。我们发现,网络训练完成后,同一个类别的图片,将对应同一套 BN 层参数,不同类别的图片,将对应不同的 BN 层参数。
通过这个微小的改动,我们终于可以愉快地在 conditional generative model 上使用 Batch Normalization 操作,而不必担心不同类别的图片对应不同的映射参数了。