多无人机多目标任务分配及航迹规划的研究内容
承接上篇文章《综述笔记-多无人机多目标任务分配1》 ,本文主要介绍多无人机多目标任务规划的研究内容。
最近读了很多文献,才知道任务规划包含了“任务分配”和“航迹规划”的,之前用词不当,还望见谅,哈哈
言归正传,无人机任务分配和航迹规划的大概流程是:地图构建-任务分配-路径规划-路径可飞性处理(平滑、避障、避碰)-定位和导航实现路径跟踪。本次笔记目录如下:
目录
1.任务分配的模型要素和研究方法
2.航迹规划的模型要素和研究方法
3.总结
-
1.任务分配的模型要素和研究方法
-
模型要素
前文中已经提到过无人机任务分配相关的模型,但多数都是静态模型,即任务分配过程没有考虑系统的动态特性,这里我们把相关要素都列出来,供大家参考:
- 无人机
无人机数量:单无人机、多无人机、同构无人机、异构无人机
异构无人机:无人机平台不同:侦察无人机、作战无人机、察打一体无人机;其次无人机的速度、作战半径、转弯半径、动力学特性、载弹量甚至携带的传感器、武器类型等都不尽相同;
无人机能力约束:不同异构特性的无人机完成任务的类型不同,如侦察型无人机可完成分类和毁伤评估任务,攻击型无人机能执行攻击任务,察打一体无人机三类任务均能执行;
- 目标
目标数量;目标的状态,目标的状态主要针对动态任务分配而言,涉及目标状态的描述、识别、状态转移;
- 任务
任务数量、任务类型;
任务约束:任务时序约束,即各个类型任务之间有固定的执行顺序,比如针对【分类、攻击、毁伤评估】组合任务,无人机执行任务的顺序必须是先分类,再攻击,最后做毁伤评估;
任务时间窗约束:时间窗约束一般针对时间敏感目标,这类模板需要在固定的时间内完成对其指定的任务,如敌方具有严重威胁的机动目标,其被侦察发现的概率低,则需要在雷达可探测时间窗内迅速组织相关任务;常态下目标被攻击后也需要在较短的时间内对其进行毁伤评估,如果没有达到毁伤阈值,则需要安排新一轮的攻击或放弃攻击等;
协同任务分配约束:要求某一时刻,一个目标对应一架或多架无人机,互相配合执行任务;
动态任务分配:可能有新增的任务,也有可能任务临时被取消,比如当无人机损毁或通信故障时,需要指定任务的临时计划;
- 目标函数
目标函数常见的有总航程代价、总时间代价,如果目标有价值的话,也可作为子目标加入到目标函数中,通过多目标优化理论,对各个子目标进行优化;
-
研究方法
无人机任务分配研究方法根据集中式架构和分布式架构可分为以下三类:
集中式方法:粒子群算法、模拟退火算法、进化计算、遗传算法、蚁群算法等智能算法,该类算法的特点是能获得近优解,算法本身可解释性不足(相关数学理论目前还不够完善),如果问题规模太大算法的时间复杂度也会相应增加,可能没办法满足实时任务分配的需求,但通常可以用来做无人机作战前的离线初始规划;
分布式方法:基于市场机制的拍卖算法、模型预测控制MPC方法、多智能体满意度决策法等,该类方法特点是所得解通常不是最优的分配方案,但其响应快,能满足实时性任务分配需求,适合用来做在线的局部规划;
集中式+分布式方法:这就是将前两者取长补短,集中式方法用于全局离线规划,分布式方法用于局部任务的在线快速调整,这种方式更强调系统间任务分配和航迹规划的分层协调。
-
2.航迹规划的模型要素和研究方法
路径规划的目的是要为无人机规划出一条从起点到目标点的可行路径,要求路径有避障、避碰能力,同时也要满足无人机的可飞性要求,如无人机的偏航角、速度的范围约束等。
-
路径规划的步骤及要素
- 确定规划空间。确定依据:起始点、任务区域、地形、空中威胁等;
- 确定数学模型。确定依据:目标函数和约束条件。目标函数一般为规划航迹最短、所受威胁最小。约束条件有无人机自身的约束(偏航角、3D空间的话还有俯仰角、无人机最大最小飞行高度、最大最小飞行速度、最小转弯半径、最大航程约束)和环境约束(如地形约束、障碍物约束、禁/避飞行区约束)等;
- 选择合适的路径搜索算法;
- 对初步规划路径做后处理。主要是前面提到的可飞性处理;
- 输出任务路径结果。
-
研究方法
- 全局路径规划方法
A*算法家族:
A*算法是通过设置适当的启发式函数,计算和比较扩展节点的启发式信息来进行下一步进行扩展,直到找到目标点。算法扩展节点少,实时性好,缺点是对信息值非常依赖,处理大范围规划问题时,计算量过大。
Probabilistic Road Map(PRM)算法:
基于采样的路径规划方法在原理上与基于搜索的路径方法有较大区别。基于搜索的路径方法,如A*和Dijkstra,常常用于grid地图。它们需要搜索目标点到终点间的所有栅格。基于采样的路径规划方法则不同,它在空间中随机撒点,然后将点用线连接起来。这样就形成了一个网络,最后将起点和终点接入到这个网络。这样就抽象出一个路图来简化整个解空间。这对于复杂的空间尤为有效。这里要注意的是当随机生成的点与障碍物重合,或者连线与障碍物重合,这些点和连线会从网络中剔除掉。
快速扩展随机树(Rapidly-exploring Random Tree,RRT) 算法:
根据当前环境快速有效地搜索高维空间,通过组态空间的随机采样点,将搜索导向空白区域,适合于解决包含几何约束和动力学约束的航迹规划问题。优势:方法简单;能和系统动态特性相结合,并在执行过程中动态修改参数;更快适应外界环境的动态变化。不足:随机性太强,只能保证高效快速获得可行航迹,无法获得较优航迹;它是一种纯粹的随机搜索算法对环境类型不敏感,当空间中包含大量障碍物或狭窄通道约束时,算法的收敛速度慢,效率会大幅下降。
生物启发类算法:
这类算法以群智能算法为主要代表,如粒子群算法、蚁群算法、遗传算法等。它们的特点是一般能获得较优的解,但和任务分配中的集中式方法类似,这类算法如果在高维空间中计算量偏大,不适合应用于对实时路径规划要求高的场所。
- 局部/动态路径规划方法
在全局路径规划生成后,无人机就会按照生成的全局路径进行导航,但由于战场环境的复杂性,如地形环境、气候等的影响,无人机不可能完全按照全局路径实施导航,因此需要借助机载传感器或者地面站等信息实时对局部路径做出调整,一般的局部路径规划有以下方法:
D*算法(Dynamic A*)族:
D*算法是A*算法的动态版,适合未知环境或环境中存在动态变化情景。与A*起点至终点的路径寻找相反,D*算法是从终点向起点反向搜索。D* Lite算法是D* 的简约版,更方便使用。
人工势场法:
人工势场法是由Khatib提出的一种用于机器人运动规划的虚拟力方法。其基本思想是将目标和障碍物对机器人运动的影响具体化成人造势场。目标处势能低,障碍物处势能高。这种势差产生了目标对机器人的 引力和障碍物对机器人的斥力,其合力控制机器人沿势场的负梯度方向向目标点运动。人工势场法计算方便,得到的路径安全平滑,并且对于动态环境可以实现实时运动控制,但是复杂的势场环境可能在目标点之外产生局部极小点导致机器人无法到达目标。适合用于长距离机动且障碍物较少的情况。
Dynamic Window Approach,DWA(动态窗口法):
通过线速度与角速度的交叉组合可以得出多组速度采样空间,依次可以通过无人机运动学模型得出多组轨迹空间,优势是反应速度较快,计算不复杂,通过速度组合(线速度与角速度)可以快速得出下一时刻规划轨迹的最优解,可能是不足是较高的灵活性会极大的降低飞行的平稳性。
Model Predictive Control, MPC(模型预测控制):
我个人理解的MPC它不是一类算法,而是一种控制模式,即通过模型预测、滚动优化以及反馈较正不断调整无人机的输入、输出变量,使整个无人机群以更优的任务执行方式和航迹规划完成组合任务,这种模式不光适用于航迹规划,同样也适用于任务规划。
-
3.总结
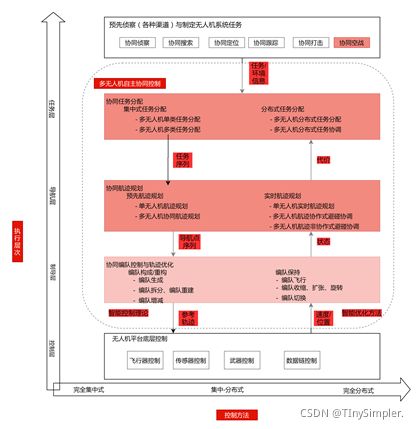
下面就用两张图作为本次笔记的结尾,希望能帮助大家梳理思路:
图1:多无人机自主协同控制(分层递阶)的研究内容

图2:多无人机自主协同控制分层递阶之结构
下一篇文章可能会针对某个具体的论文或问题,分析其背景、数学模型、研究方法,咱下期见。
参考资料:
对Probabilistic Road Map(PRM)概率路图路径规划方法的理解
论文 《UAV Online Path Planning Based on Dynamic Multi-objective Evolutionary Algorithm》;
书籍《多无人机自主协同控制理论与方法》(第2版),作者沈林成。