【深度学习】吴恩达课程笔记(三)——参数VS超参数、深度学习的实践层面
笔记为自我总结整理的学习笔记,若有错误欢迎指出哟~
吴恩达课程笔记——参数VS超参数、深度学习的实践层面
- 六、参数VS超参数
-
- 1.参数和超参数的区别
- 2.什么是超参数?
- 3.如何寻找超参数的最优值?
- 七、深度学习的实践层面
-
- 1.训练 / 验证 / 测试集(Train / Dev / Test)
- 2.偏差 / 方差 (Bias / Variance)
- 3.机器学习基础
- 4.L2正则化
-
- 范数的概念
- 正则化的定义
- L2正则化
- 正则化为什么可以预防过拟合
- 5.dropout(随机失活)
-
- 基本步骤
- Dropout的缺点
- 如何实施 dropout
- 6.其他正则化方法
-
- 数据扩增
- early stopping
- 7.归一化输入
-
- 步骤
- 目的
- 8.梯度消失/梯度爆炸(Vanishing / Exploding gradients)
-
- 定义
- 解决方法:权重初始化(Weight Initialization)
- 9.梯度校验
-
- 梯度的数值逼近(Numerical approximation of gradients)
- 梯度检验(Gradient checking)
- 梯度检验应用的注意事项
笔记链接
【深度学习】吴恩达课程笔记(一)——深度学习概论、神经网络基础
【深度学习】吴恩达课程笔记(二)——浅层神经网络、深层神经网络
六、参数VS超参数
1.参数和超参数的区别
参数(Parameters)是指模型内部需要学习的权重值。在训练过程中,模型通过反向传播算法来更新这些权重值以最小化损失函数。例如,在线性回归模型中,参数就是回归系数(即斜率和截距),在神经网络模型中,参数就是每个神经元之间的权重值。
超参数(Hyperparameters)是指模型训练过程中需要设置的一些参数,这些参数不能通过反向传播算法来更新,而是需要手动调整。超参数的选择可以影响模型的性能和训练效果。例如,在神经网络模型中,超参数包括学习率、批量大小、隐藏层大小等。
参数和超参数的区别在于,参数是模型内部需要学习的权重值,而超参数是模型训练过程中需要手动设置的一些参数。参数的值是通过训练数据自动学习得到的,而超参数的值需要手动调整,通常需要多次尝试和实验才能找到最佳的超参数组合。
2.什么是超参数?
超参数(Hyperparameters)是机器学习算法中的一种参数,它们用于控制模型训练过程的行为,而不是直接由数据决定。与模型的权重(即学习参数)不同,超参数通常在训练之前设定,并且需要手动调整。
超参数的选择对模型的性能和训练效果有很大影响。不同的超参数组合可能导致不同的模型表现,因此选择合适的超参数非常重要。
常见的超参数包括:
- 学习率(Learning Rate):控制模型在每次迭代中更新权重的步长大小。
- 正则化参数(Regularization Parameter):用于控制模型的复杂度,防止过拟合。
- 批量大小(Batch Size):指定每次迭代中用于更新权重的样本数量。
- 迭代次数(Number of Iterations):定义模型在训练集上迭代的次数。
- 隐藏层大小(Size of Hidden Layers):适用于神经网络模型,用于设置隐藏层的节点数量。
- 决策树的深度(Depth of Decision Trees):适用于决策树模型,用于控制树的最大深度。
- 核函数选择(Choice of Kernel Function):适用于支持向量机模型,用于定义数据之间的相似度。
- 聚类算法中的簇数量(Number of Clusters):适用于聚类算法,用于指定期望的簇数量。
选择合适的超参数通常需要通过试验和交叉验证来确定最佳组合。通常,可以使用网格搜索、随机搜索或贝叶斯优化等技术来自动化超参数调整的过程,以找到最佳的超参数组合。
3.如何寻找超参数的最优值?
寻找超参数的最优值是一个重要且挑战性的任务。以下是一些常用的方法和技巧:
- 网格搜索(Grid Search):网格搜索是一种简单直观的方法,它通过指定超参数的候选值组成的网格来遍历所有可能的组合。对于每个组合,使用交叉验证来评估模型性能,并选择具有最佳性能的超参数组合。
- 随机搜索(Random Search):与网格搜索相比,随机搜索不是遍历所有可能的组合,而是在给定的超参数空间中随机选择一组超参数进行评估。通过随机选择,可以更高效地探索超参数空间,并找到良好的超参数组合。
- 贝叶斯优化(Bayesian Optimization):贝叶斯优化是一种基于贝叶斯推断的序列模型优化方法。它通过建立一个代理模型来估计目标函数(例如模型的性能),并使用贝叶斯推断来指导下一次选择哪个超参数组合进行评估。贝叶斯优化可以有效地在较少的迭代次数内找到最优的超参数组合。
- 交叉验证(Cross-Validation):交叉验证是一种评估模型性能的技术,也可以用于超参数调整。通过将训练数据分成多个子集,然后在每个子集上轮流进行模型训练和验证,可以获得更稳健的性能评估结果。在超参数调整过程中,使用交叉验证来评估每个超参数组合的性能,并选择具有最佳性能的组合。
- 学习曲线(Learning Curve):学习曲线是一种可视化工具,用于分析模型在不同超参数设置下的性能变化。通过绘制训练集大小和模型性能之间的关系,可以帮助判断模型是否过拟合或欠拟合,并指导超参数的选择。
- 自动化调参工具:还有一些自动化调参工具可用于帮助寻找最优的超参数组合,例如Hyperopt、Optuna和scikit-optimize等。这些工具结合了上述方法,并提供了更高级的优化算法和搜索策略,以加速超参数调整的过程。
需要注意的是,超参数的最优值是相对的,它取决于数据集、模型类型和具体任务等因素。因此,超参数调整通常需要反复尝试和实验,以找到最适合特定情况的超参数组合。
七、深度学习的实践层面
1.训练 / 验证 / 测试集(Train / Dev / Test)
训练集:训练模型
验证集:验证算法正确性
测试集:测试算法效率
2.偏差 / 方差 (Bias / Variance)
- 偏差大:训练集上的结果较差
- 方差大:验证集上的结果比训练集上的差的较多

| Train set error | Dew set error | 偏差 / 方差 |
|---|---|---|
| 1% | 11% | 高方差 |
| 15% | 16% | 高偏差 |
| 15% | 30% | 高方差、高偏差 |
| 0.5% | 1% | 低方差、低偏差 |
具体例子
| 偏差 / 方差 | 图像 |
|---|---|
| 高偏差(欠拟合) |  |
| 适度拟合 | 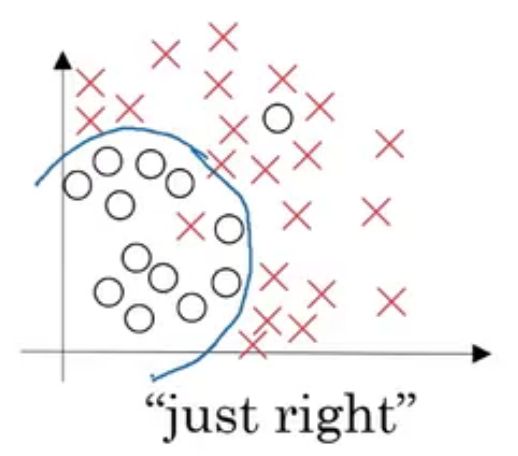 |
| 高方差(过拟合) |  |
| 高偏差 & 高方差 |  |
3.机器学习基础
| 遇到的问题 | 可尝试的解决办法 |
|---|---|
| 高偏差(欠拟合) | 1.更大的神经网络 2.更多的神经网络层数 |
| 高方差(过拟合) | 1.更多训练数据 2.正则化 |
4.L2正则化
范数的概念
在数学中,范数(Norm)是一种将向量映射到非负实数的函数。在机器学习和优化问题中,范数常用于衡量向量的大小或长度。
![]()
Lp 范数:

L1 范数:也称为曼哈顿范数(Manhattan Norm)。L1 范数在一些特定场景下具有稀疏性,能够产生稀疏解。
![]()
L2 范数:也称为欧几里得范数(Euclidean Norm)。L2 范数在许多优化问题中都有很好的性质,例如它可以用于正则化、最小二乘问题等。
![]()
L∞ 范数:也称为切比雪夫范数(Chebyshev Norm),定义为向量中各个元素绝对值的最大值。L∞ 范数可以用于约束向量各个元素的最大值。
![]()
在机器学习中,范数常用于正则化、特征选择、最小二乘问题等。例如,在线性回归模型中,可以使用 L1 或 L2 范数对模型参数进行正则化,以避免过拟合。在特征选择中,可以使用 L1 范数来选择具有重要影响的特征,从而减少特征数量,提高模型的泛化能力。
正则化的定义
在机器学习中,正则化(Regularization)是一种常用的技术,旨在减少模型的复杂度,避免过拟合,提高模型的泛化能力。正则化通过在损失函数中加入一个惩罚项来实现。
通常,机器学习模型的目标是最小化训练误差(即损失函数),但是如果模型过于复杂,则可能会在训练数据上表现良好,但在新数据上表现不佳,这种现象称为过拟合(高方差)。为了避免过拟合,可以使用正则化技术来限制模型的复杂度。
常见的正则化方法包括:
- L1 正则化:也称为 Lasso 正则化,通过在损失函数中添加 L1 范数惩罚项,使得模型参数中的一些权重变成 0,从而实现特征选择和稀疏性。
- L2 正则化:也称为 Ridge 正则化,通过在损失函数中添加 L2 范数惩罚项,使得模型参数的值变得更小,从而避免过拟合。
- 弹性网络正则化:结合了 L1 和 L2 正则化,可以同时实现特征选择和过拟合控制。
L2正则化
∣ ∣ • ∣ ∣ F 2 : 矩阵的弗罗贝尼乌斯范数( F r o b e n i u s ) ∣ ∣ W [ L ] ∣ ∣ F 2 = ∑ i = 1 n [ l − 1 ] ∑ j = 1 n [ l ] ( W i j [ l ] ) 2 W : ( n [ l − 1 ] , n [ l ] ) ||•||^2_F:矩阵的弗罗贝尼乌斯范数(Frobenius)\\ ||W^{[L]}||^2_F=\sum_{i=1}^{n^{[l-1]}}\sum_{j=1}^{n^{[l]}}(W_{ij}^{[l]})^2\\ W:(n^{[l-1]},n^{[l]}) ∣∣•∣∣F2:矩阵的弗罗贝尼乌斯范数(Frobenius)∣∣W[L]∣∣F2=i=1∑n[l−1]j=1∑n[l](Wij[l])2W:(n[l−1],n[l])
重定义损失函数为
λ : r e g u l a r i z a t i o n p a r a m e t e r J ( w , b ) = 1 m ∑ i = 1 m L ( y ^ i , y i ) + λ 2 m ∑ l ∣ ∣ W [ l ] ∣ ∣ F 2 d W [ l ] = ( f r o m p r o p a g a t i o n ) + λ m W [ l ] W [ l ] = W [ l ] − α d W [ l ] = W [ l ] − α [ ( f r o m p r o p a g a t i o n ) + λ m W [ l ] ] = W [ l ] − α λ m W [ l ] − α ( f r o m p r o p a g a t i o n ) = ( 1 − α λ m ) W [ l ] − α ( f r o m p r o p a g a t i o n ) \lambda:regularization\ parameter \\ J(w,b)=\frac{1}{m}\sum_{i=1}^{m}{L(ŷ_i,y_i)}+\frac{\lambda}{2m}\sum_l||W^{[l]}||_F^{2} \\ dW^{[l]}=(from\ propagation)+\frac{\lambda}{m}W^{[l]} \\ W^{[l]}=W^{[l]}-\alpha dW^{[l]}\\ =W^{[l]}-\alpha[(from\ propagation)+\frac{\lambda}{m}W^{[l]}] \\ =W^{[l]}-\frac{\alpha\lambda}{m}W^{[l]}-\alpha(from\ propagation)\\ =(1-\frac{\alpha\lambda}{m})W^{[l]}-\alpha(from\ propagation)\\ λ:regularization parameterJ(w,b)=m1i=1∑mL(y^i,yi)+2mλl∑∣∣W[l]∣∣F2dW[l]=(from propagation)+mλW[l]W[l]=W[l]−αdW[l]=W[l]−α[(from propagation)+mλW[l]]=W[l]−mαλW[l]−α(from propagation)=(1−mαλ)W[l]−α(from propagation)
L2正则化对dW进行了增大处理,使得W的值受到惩罚而变小。L2正则对特征系数做了比例的缩放,这会让系数趋向变小但不会变为0,因此L2正则会让模型变得更简单,防止过拟合,而不会起到特征选择的作用。
正则化为什么可以预防过拟合
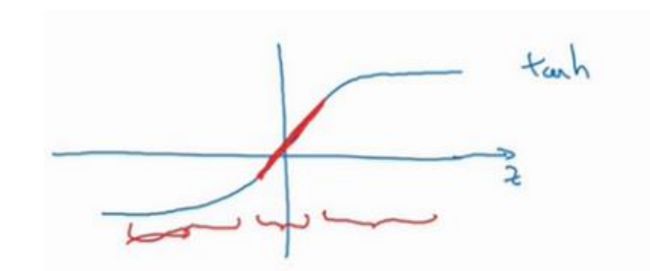
若激活函数选择ℎ()。如果正则化参数变得很大,参数很小,也会相对变小,ℎ会相对呈线性,整个神经网络会计算离线性函数近的值,不是一个极复杂的高度非线性函数,不会发生过拟合。
Z [ l ] = W [ 1 ] A [ l − 1 ] + b [ l ] Z^{[l]}=W^{[1]}A^{[l-1]}+b^{[l]}\\ Z[l]=W[1]A[l−1]+b[l]
5.dropout(随机失活)
基本步骤
他的基本步骤是在每一次的迭代中,随机删除一部分节点,只训练剩下的节点。每次迭代都会随机删除,每次迭代删除的节点也都不一样,相当于每次迭代训练的都是不一样的网络,通过这样的方式降低节点之间的关联性以及模型的复杂度,从而达到正则化的效果。

-
设置一个超参数 keep_prob:每层节点随机保留的比例
-
将 keep_prob 设置为 0.7,那么就会随机30%的节点消失
-
将这一层的参数矩阵与根据 keep_prob 生成的 {0, 1} 矩阵逐点乘积
-
前向传播与反向传播都需要做以上的操作
Dropout的缺点
- 网络训练时间增加:在使用 Dropout 时,由于每次训练迭代都需要随机屏蔽一部分神经元,因此会导致网络的训练时间增加。这是因为在每个迭代中,都需要更新被屏蔽神经元的权重,从而导致计算量的增加。
- 需要适当调整学习率:由于 Dropout 可能导致部分神经元的输出值变为 0,因此在使用 Dropout 时,需要适当调整学习率。如果学习率过高,可能会导致网络无法收敛;如果学习率过低,可能会导致网络收敛速度过慢。
- 内存消耗增加:在使用 Dropout 时,为了保存被屏蔽的神经元的状态,需要占用额外的内存空间。对于大型的神经网络,这可能会导致内存消耗的增加,限制了模型的规模和训练效率。
- 不适用于所有类型的层:Dropout 技术通常适用于全连接层和卷积层,但对于循环神经网络(RNN)等具有时间依赖性的层,Dropout 的应用可能会更加复杂。在 RNN 中,由于时间步之间的依赖关系,随机屏蔽神经元可能会导致信息丢失和模型性能下降。
如何实施 dropout
inverted dropout(反向随机失活)
一个三层( = 3)网络来举例说明
-
定义向量, [3]表示一个三层的 dropout 向量
d3 = np.random.rand(a3.shape[0],a3.shape[1]) < keep-prob -
从第三层中获取激活函数它 [3],让 [3]中 0 元素与 [3]中相对元素归零。
a3 =np.multiply(a3,d3) -
向外扩展 [3],用它除以 keep-prob 参数。
- 原因: [4] = [4] [3] + [4],为了不影响[4]的期望值,我们需要用[4] [3] /keep-prob, [3] 的期望值不会变
a3/= keep-prob
6.其他正则化方法
数据扩增

early stopping
提前终止可能是最简单的正则化方式,他适用于模型的表达能力很强的时候。这种情况下,一般训练误差会随着训练次数的增多逐渐下降,而测试误差则会先下降而后再次上升。我们需要做的就是在测试误差最低的点停止训练即可。
7.归一化输入
假设我们在处理深度学习相关问题时的输入有两个属性,分别为x1与x2。具体形式如下图所示。

| 零均值化 | 归一化方差 |
|---|---|
 |
 |
步骤
-
零均值化:使样本数据均匀分布到x轴上下
x ( i ) 为输入向量 μ = 1 m ∑ i − 1 m x ( i ) x = x − μ x^{(i)}为输入向量 \\ \mu=\frac{1}{m}\sum_{i-1}^{m}x^{(i)} \\ x=x-\mu x(i)为输入向量μ=m1i−1∑mx(i)x=x−μ -
归一化方差:使样本数据均匀分布到-1到1之间
σ 2 = 1 m ∑ i − 1 m x ( i ) 2 x / = σ 2 \sigma^{2}=\frac{1}{m}\sum_{i-1}^{m}x^{(i)2} \\ x/=\sigma^{2} σ2=m1i−1∑mx(i)2x/=σ2
目的

如果在图片左侧的情况下使用优化算法减少梯度,就必须使用一个非常小的学习率,那将会增加许多迭代次数。
使用归一化处理后损失函数的梯度可能会变得比较均匀,就像图片右侧所示。一个圆的球形轮廓,那么不论从哪个位置开始,优化算法往往都能更快的找到最优值。
综上来说,在一些特殊数据中,例取值范围差异较大等,需要进行正则化处理,以此加快梯度下降的速度。
注意:用归一化方式去处理了训练集,那么一定要用相同的方式去处理测试集。
8.梯度消失/梯度爆炸(Vanishing / Exploding gradients)
定义
y ^ = W [ l ] W [ L − 1 ] W [ L − 2 ] … W [ 3 ] W [ 2 ] W [ 1 ] x ŷ = W^{[l]}W^{[L−1]}W^{[L−2]} … W^{[3]}W^{[2]}W^{[1]}x y^=W[l]W[L−1]W[L−2]…W[3]W[2]W[1]x

若W是大于1的单位矩阵:
前向传播中,激活函数的值会以指数形式增长,即爆炸

若W是小于1的单位矩阵:
前向传播中,激活函数的值会以指数形式减小,即消失

解决方法:权重初始化(Weight Initialization)
对第 l 层的W变量的初始化
若第 l 层使用relu激活函数,建议使用:
W [ l ] = n p . r a n d o m . r a n d n ( s h a p e ) ∗ n p . s q r t ( 2 n [ l − 1 ] ) W^{[l]}=np.random.randn(shape)*np.sqrt(\frac{2}{n^{[l-1]}}) W[l]=np.random.randn(shape)∗np.sqrt(n[l−1]2)
若第 l 层使用tanh激活函数,建议使用:
W [ l ] = n p . r a n d o m . r a n d n ( s h a p e ) ∗ n p . s q r t ( 1 n [ l − 1 ] ) W^{[l]}=np.random.randn(shape)*np.sqrt(\frac{1}{n^{[l-1]}}) W[l]=np.random.randn(shape)∗np.sqrt(n[l−1]1)
理由
这种计算使得W中的值被初始化为接近1的数,使得它不容易出现梯度爆炸或消失的情况。
初始化Tips
- 随机初始化可以破坏对称性,保证不同隐藏单元能学到不同的东西
- 不要用过大的值初始化
- He初始化对使用ReLU激活函数的网络非常有效
9.梯度校验
梯度的数值逼近(Numerical approximation of gradients)

假设 = 1,的值为 0.01。
不增大 的值,而是在 右侧,设置一个 + ,在 左侧,设置 −
得到的不是一个单边公差而是一个双边公差

f ( θ ) = θ 3 当 θ = 1 时, g ( θ ) = 3 θ 2 = 3 f(θ) = θ^3\\ 当θ = 1时,g(θ) = 3θ^2 = 3 f(θ)=θ3当θ=1时,g(θ)=3θ2=3
g ( θ ) = f ′ ( θ ) = f ( θ + ϵ ) − f ( θ − ϵ ) 2 ϵ = f ( 1.01 ) 3 − f ( 0.99 ) 3 2 × 0.01 = 3.0001 g(θ)=f'(\theta)=\frac{f(\theta+\epsilon)-f(\theta-\epsilon)}{2\epsilon}=\frac{f(1.01)^3-f(0.99)^3}{2\times0.01}=3.0001 g(θ)=f′(θ)=2ϵf(θ+ϵ)−f(θ−ϵ)=2×0.01f(1.01)3−f(0.99)3=3.0001
结论
- 双边公差,()的值为3.0001,逼近误差是0.0001
- 单边公差,即从到 + 之间的误差,()的值为3.0301,逼近误差是 0.03,不是 0.0001
- 使用双边误差的方法更逼近导数
梯度检验(Gradient checking)
- [1], [1]……[], [],把所有参数转换成一个巨型向量。得到了一个的代价函数(即())
- d[1],d [1]……d[],d [],把所有参数转换成一个巨型向量d。
- d 与 维度相同


和代价函数的梯度或坡度有什么关系?
J ( θ 1 , θ 2 , θ 3 , … … ) J(θ1, θ2, θ3, … … ) J(θ1,θ2,θ3,……)
f o r e a c h i : d θ a p p o x [ i ] = J ( θ 1 , θ 2 , ⋯ , θ i + ϵ , ⋯ ) − J ( θ 1 , θ 2 , ⋯ , θ i − ϵ , ⋯ ) 2 ϵ for\ each\ i: \\ d\theta_{appox}[i]=\frac{J(\theta_1,\theta_2,\cdots,\theta_i+\epsilon,\cdots)-J(\theta_1,\theta_2,\cdots,\theta_i-\epsilon,\cdots)}{2\epsilon} \\ for each i:dθappox[i]=2ϵJ(θ1,θ2,⋯,θi+ϵ,⋯)−J(θ1,θ2,⋯,θi−ϵ,⋯)
将其与dθ进行比较,判断该数是否足够小。
∣ ∣ d θ a p p o x − d θ ∣ ∣ 2 ∣ ∣ d θ a p p o x ∣ ∣ 2 + ∣ ∣ d θ ∣ ∣ 2 { \frac{||d\theta_{appox}-d\theta||_2}{||d\theta_{appox}||_2+||d\theta||_2} } ∣∣dθappox∣∣2+∣∣dθ∣∣2∣∣dθappox−dθ∣∣2
分子使用了欧几里的距离,分母存在的意义是使得整体数字变成一个比率,而不至于过大。
梯度检验应用的注意事项
-
不要在训练中使用梯度检验,它只用于调试。
- 因为梯度检测使用大量for loop,非常耗费时间
-
如果算法的梯度检验失败,要检查所有项,检查每一项,并试着找出 bug
- 找到使得矩阵dθappox与矩阵dθ相差过大的那列向量,顺藤摸瓜找出导致梯度检测失败的错误方程
-
如果使用正则化,记得在cost function中添加正则项
-
梯度检验不能和dropout一起用
- 因为dropout会隐藏隐层单元的部分子集,而J被定义为计算所有隐层的损失程度。dropout会使每一轮的J值变化不那么稳定,可能会导致梯度检验晕头转向
- 解决方法:把dropout中的keepprob设成1,然后进行梯度检验、检验函数的正确性。然后寄希望于dropout会对调好的模型有好的影响,再把dropout加回去。
-
有时候W、b在比较小的时候运行正常,当训练一段时间后,W、b变大了之后运行不正常了。
- 可以在运行随机初始化参数的时候进行梯度检验,在训练一段时间后再进行梯度检验。