- 【自编程使松灵机器人转圈】
加油吧小森
方法机器人
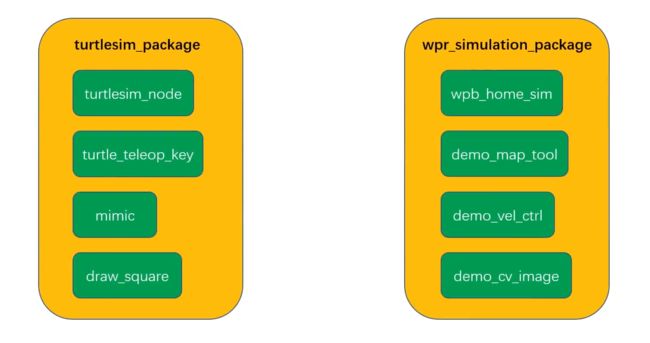
自编程使松灵机器人转圈1.USB转CAN驱动:sudomodprobegs_usbsudoiplinksetcan0uptypecanbitrate5000002.启动机器人底盘:roslaunchscout_basescout_base.launch看到松灵机器人官方文档,以为启动底盘节点在scout_bringup功能包里。3.编程发布话题使小车转圈rosrunbringupdraw_circ
- 松灵机器人SCOUT的ROS代码架构
鱼尾sama
ROSc++自动驾驶
++++++++++++++++++++++++++++++++++++松灵机器人感觉可能还是比较小众吧。明明官方的github,但是star之类的完全没有关注度,也没有issue。这个SCOUT_ROS主要是解决SCOUT底盘与上位机的通信方式,截止目前,已经开放了RS232和CAN两种通信方式。而且CSDN上只有寥寥几篇的相关博客,参考价值不高。故整理此篇,以供后日快速上手。代码地址:http
- 松灵学院 | Scout mini 仿真指南
松灵机器人AgileX Robotics
gazabourdf语法ROS开发平台
本文适合有ROS1基础与了解urdf语法和gazebo的朋友SCOUTMINI是一款全地形高速MiniUGV,具有四轮差速驱动、独立悬挂、原地差速自转等特点,得益于自主研发的轻量级动力系统解决方案,SCOUTMINI最大速度高达10KM/H,专为前沿科学实验设计的全能型移动研究平台。此外,松灵为用户提供了SCOUTMINI的完整gazebo仿真支持库,本文将带您逐步上手使用:仓库地址:https:
- Azure 虚拟数据中心:构建企业级云架构的利器
齐飞锴Timothea
Azure虚拟数据中心:构建企业级云架构的利器vdcToolkittoaccelerateAzureadoptionforenterprisecustomers项目地址:https://gitcode.com/gh_mirrors/vd/vdc项目介绍Azure虚拟数据中心(AzureVirtualDatacenter,简称VDC)是一个专为企业级客户设计的工具包,旨在帮助用户在Microsoft
- 2024年Python最新下载安装教程,附详细图文,持续更新
Java徐师兄
Python教程python开发语言Python下载安装Python安装Python3下载安装教程
大家好,我是Java徐师兄,今天为大家带来的是Python3的下载安装教程,适用于所有Python3版本,感兴趣的可以看一下文章目录简介一、Python的下载1网盘下载地址(下载速度比较快,推荐)2官网下载地址二、Python的安装三推荐阅读简介Python是一种高级、解释型、面向对象的编程语言,由GuidovanRossum于20世纪90年代初开发。Python语法简洁、易读、功能强大,被广泛应
- fatal error: glog/logging.h: 没有那个文件或目录
小张小张快来学习
ROSubuntu
系统版本:ubuntu18.04ROS版本:melodiccatkin_make报错:Infileincludedfrom/home/用户名/桌面/AutonomousMining/src/pnc/src/file.cc:17:0:/home/用户名/桌面/AutonomousMining/src/pnc/include/file.h:37:10:fatalerror:glog/logging.h
- Spring 的设计理念之AOP
冰糖心158
SpringFrameworkjava
Spring框架中的AOP(面向切面编程)是其核心设计理念之一,旨在通过模块化横切关注点(Cross-CuttingConcerns)来提升代码的可维护性和复用性。以下是SpringAOP的设计理念及关键实现细节的总结:1.AOP的核心思想解决横切关注点:将分散在多个模块中的通用功能(如日志、事务、安全等)抽取为独立的切面(Aspect),避免代码重复和耦合。对OOP的补充:AOP并非取代OOP,
- 【SpringAop实现切片注解】
壹佰大多
javaandroid数据库
文章目录AOP的目的AOP代码实现导包:aop实现注解实现异步监听AOP的目的SpringAOP(Aspect-OrientedProgramming)是Spring框架中的一项功能,旨在通过切面(Aspect)将横切关注点(Cross-CuttingConcerns)与业务逻辑解耦,从而使代码更加模块化和易维护。以下是SpringAOP的主要目的和应用场景:解耦横切关注点横切关注点是指多个模块中
- kamailio-ACC模块介绍【kamailio6.0. X】
狂爱代码的码农
VOIP那些事kamaimio
- 3款 .NET 开源的编辑器,包含代码、文本和Markdown编辑功能!
追逐时光者
C#.NET开源项目.net编辑器c#微软技术
前言今天大姚给大家推荐3款.NET开源、免费的编辑器,其中包含C#代码编辑器、文本编辑器和Markdown编辑器!RoslynPadRoslynPad是一个基于Roslyn和AvalonEdit开源、轻量、跨平台的C#编辑器。开源地址:https://github.com/roslynpad/roslynpad详细介绍:一个基于Roslyn和AvalonEdit的跨平台C#编辑器NotepadsN
- 什么是“脚本语言”
暮雨澪
脚本语言
一、脚本脚本语言又被称为扩建的语言,或者动态语言,是一种编程语言,用来控制软件应用程序,脚本通常是以文本(ASCⅡ)保存,只是在被调用时进行解释或者编译。当执行脚本时,计算机会执行一连串的操作。这些操作可能只涉及Illustrator,也可能涉及其他应用程序,如文字处理、电子表格和数据管理程序。Illustrator可支持多种脚本环境(例如,MicrosoftVisualBasic、AppleSc
- 通过命令行工作流提升工作效率的实战教程(持续更新)
herosunly
大模型工作流实战教程
大家好,我是herosunly。985院校硕士毕业,现担任算法研究员一职,热衷于机器学习算法研究与应用。曾获得阿里云天池比赛第一名,CCF比赛第二名,科大讯飞比赛第三名。拥有多项发明专利。对机器学习和深度学习拥有自己独到的见解。曾经辅导过若干个非计算机专业的学生进入到算法行业就业。希望和大家一起成长进步。 本文主要介绍了通过命令行工作流提升工作效率的实战教程,希望对使用大语言模型的同学们有所
- PyQt5中的QObject对象
strive_one
QObject在Qt中QObject是所有类的基类,换而言之是在Qt中所有的类均继承自QObject,这使得QObject中的所有方法在其它类中使用。所以学习QObject中的方法有其特殊的意义。继承结构测试的方法fromPyQt5.QtCoreimportQObject#创建一个QObject对象obj=QObject()#获得父类mros=QObject.mro()formroinmros:p
- spring.cloud.nacos.config.shared-configs property
hshpy
springjava前端
InNacos,thespring.cloud.nacos.config.shared-configspropertyisusedtoloadadditionalsharedconfigurationsthatarenotdirectlytiedtothespecificapplicationbutcanbesharedacrossmultipleapplicationsorenvironment
- 【Windows】修改C盘下用户名
weixin_30872867
操作系统
假设原用户名为Icon,需改为Ping。先新建一个管理员账户,然后注销当前用户,以新建的管理员账户登录;重命名C:\Users\Icon为C:\Users\Ping;打开注册表编辑器(win+R输入regedit),定位到HKEY_LOCAL_MACHINE\SOFTWARE\Microsoft\WindowsNT\CurrentVersion\ProfileList的某一子项,将“数据名称”为P
- github action 基础
hzlarm
工具
githubaction基础简介GitHubActions是Microsoft收购GitHub后推出的持续集成(Continuousintegration,简称CI)服务,它提供了配置非常不错的虚拟服务器环境,基于它可以进行构建、测试、打包、部署项目。简单来讲就是将软件开发中的一些流程交给云服务器自动化处理,比方说开发者把代码push到GitHub后它会自动测试、编译、发布。有了持续集成服务开发者
- Word转表单只需90秒?揭秘教育与企业培训的「自动化提效神器」
流形填表
word自动化运维
“为什么我总在深夜复制粘贴试题?”——一个教师的效率困局凌晨1点,王老师还在电脑前逐题复制Word试卷到MicrosoftForms。第27题粘贴后,选项突然错位,她崩溃地发现:✅**耗时陷阱**:30道题花费2小时,其中45分钟在调整格式。✅**格式诅咒**:从Word粘贴的数学公式变成乱码,位置全乱。✅**多语噩梦**:双语试题中的日文假名显示为“????”。这不是个例——调研显示,87%的教
- DeepSeek 系列之 无需互联网即可在本地运行 DeepSeek R1
知识大胖
NVIDIAGPU和大语言模型开发教程deepseekllamaollama知识图谱
简介问:想尝试DeepSeekR1吗?问:担心隐私问题?问:更喜欢离线交互,而不需要持续的互联网连接?Ollama和ChatboxAI为您提供保障!推荐文章《如何在本地电脑上安装和使用DeepSeekR-1》权重1,DeepSeek《Nvidia系列之使用NVIDIAIsaacSim和ROS2的命令行控制您的机器人》权重1,NVIDIAIsaacSim《CrewAI教程之07什么是Memory记忆
- springboot集成钉钉_SpringBoot集成钉钉报警sdk(解决Failed to introspect Class异常)
周愫理(西山飞鱼)
springboot集成钉钉
1.pom文件配置在resources/lib目录下加入钉钉的sdk的jar包。com.dingtalk.apidingtalk3.0.12system${project.basedir}/src/main/resources/lib/taobao-sdk-java-auto_1479188381469-20191122.jarmaven插件配置:org.springframework.boots
- SQLAlchemy:Python SQL工具包和对象关系映射器
零 度°
pythonpython
SQLAlchemy是一个PythonSQL工具包和对象关系映射器(ORM),它提供了一个高层的ORM以及底层的SQL表达式语言。SQLAlchemy是数据驱动的应用程序的常用工具,它能够与多种数据库后端进行交互,包括但不限于SQLite、MySQL、PostgreSQL和MicrosoftSQLServer。SQLAlchemy的主要特点ORM:将Python类映射到数据库表。SQL表达式语言:
- windows上使用wsl安装ubuntu16.04
b2Superman
windows
1.设置->系统->开发者选项->开发人员模式2.控制面板->程序与功能->启动或关闭windows功能->勾选虚拟机平台和使用与Linux的windows子系统->重启3.win+x终端管理员启用wsl功能dism.exe/online/enable-feature/featurename:Microsoft-Windows-Subsystem-Linux/all/norestart安装WSL2
- VSCode:deepspeed调试【.vscode/launch.json配置】
u013250861
图神经网络#LLM/训练vscodeide编辑器
在控制台利用whichdeepspeed找到deepspeed路径:/home/wyr/anaconda3/envs/rlhf/bin/deepspeed{//使用IntelliSense了解相关属性。//悬停以查看现有属性的描述。//欲了解更多信息,请访问:https://go.microsoft.com/fwlink/?linkid=830387"version":"0.2.0","confi
- ROS2---基础操作
kyle~
ROS2ROS2C++
工作空间(workspace)workspace是一个存放项目开发相关文件的文件夹。例如我们要开发一个机器人,我们可以创建一个工作空间,然后存放这个机器人不同功能的包(感知(雷达,相机等),运动(底盘,云台,发射结构),控制(红外,蓝牙等))。ros2工作空间的创建mkdir-pws00_helloworld/src#创建工作空间以及子级目录src,工作空间名称可以自定义cdws00_hellow
- PennyLane 开源项目教程
龚翔林Shannon
PennyLane开源项目教程pennylanePennyLaneisacross-platformPythonlibraryfordifferentiableprogrammingofquantumcomputers.Trainaquantumcomputerthesamewayasaneuralnetwork.项目地址:https://gitcode.com/gh_mirrors/pe/pen
- 单细胞-第五节 多样本数据分析,打分R包AUCell
遗落凡尘的萤火-生信小白
单细胞分析数据分析r语言windows
文件在单细胞\5_GC_py\1_single_cell\3.AUCell.Rmd1.基因rm(list=ls())load("g.Rdata")2.AUCellhttps://www.ncbi.nlm.nih.gov/pmc/articles/PMC9897923IF:NANANA用这个文章里的方法,将单细胞亚群的marker基因与ros相关基因取交集,用作AUCell的基因集Theinters
- Oracle11g下载与安装(windows)
pingcode
JAVA全栈开发笔记(全)JAVA前后端开发笔记oracle
一、Oracle11g下载官网下载地址:OracleDatabase11gRelease2forMicrosoftWindows(x64)选择"AcceptLicenseAgreement",点击"win64_11gR2_database_1of2.zip"和"win64_11gR2_database_2of2.zip",进行下载。(下载前需登录Oracle账号,没有的话可以用邮箱注册一个,登录之
- 开源邮箱套件介绍系列1:SOGo
小胡子大魔王
邮件系统开源软件SOGo
项目网站:SOGo|FreeOpenSourceWebmail提示:如下内容大部分来自官方网站,通过AI智能翻译而来。1.SOGo功能概述SOGo提供了多种访问日历和消息数据的方式。您的用户可以使用网页浏览器、MicrosoftOutlook、MozillaThunderbird、AppleiCal或移动设备来访问相同的信息。由于SOGo采用并推广开放标准,因此它是一个高度互操作性的解决方案。其中
- Surface Pro 指示灯亮但充不进电的解决办法
x66ccff
电脑维修经验分享
SurfacePro指示灯亮但充不进电的解决办法1、充电槽有灰尘方法:用力吹充电槽,然后再充电2、铜片氧化方法:去除表面氧化层3、插座故障导致电压偏低方法:换一个插座4、长时间充电导致不明原因的充电失败方法:(Microsoft社区建议方法)把磁吸充电头反着充十分钟,然后再正着充电即可恢复正常警告⚠:pro3机型不适用✔pro6适用5、其他原因方法:百度
- 【转载】Spring Cloud Alibaba文档
Hatakefiftyfifty
Spring家族-SpringCloudspringcloudjava微服务
IntroductionSpringCloudAlibabaaimstoprovideaone-stopsolutionformicroservicesdevelopment.Thisprjoectincludestherequiredcomponentsfordevelopingdistributedapplicationsandservices,sothatdeveloperscandevel
- 亚博microros小车-原生ubuntu支持系列:16 机器人状态估计
bohu83
机器人ubuntumicrorosimuimu_toolslocalization
本来想测试下gmapping建图,但是底层依赖了yahboomcar_bringup做底层的数据处理,所以先把依赖的工程导入。程序启动后,会订阅imu和odom数据,过滤掉一部分的imu数据后,然后与odom数据进行融合,最后输出一个融合后的odom数据用于估计机器人的状态,该数据多用于建图和导航中。src/yahboomcar_bringup/launch/新建启动脚本yahboomcar_br
- Hadoop(一)
朱辉辉33
hadooplinux
今天在诺基亚第一天开始培训大数据,因为之前没接触过Linux,所以这次一起学了,任务量还是蛮大的。
首先下载安装了Xshell软件,然后公司给了账号密码连接上了河南郑州那边的服务器,接下来开始按照给的资料学习,全英文的,头也不讲解,说锻炼我们的学习能力,然后就开始跌跌撞撞的自学。这里写部分已经运行成功的代码吧.
在hdfs下,运行hadoop fs -mkdir /u
- maven An error occurred while filtering resources
blackproof
maven报错
转:http://stackoverflow.com/questions/18145774/eclipse-an-error-occurred-while-filtering-resources
maven报错:
maven An error occurred while filtering resources
Maven -> Update Proje
- jdk常用故障排查命令
daysinsun
jvm
linux下常见定位命令:
1、jps 输出Java进程
-q 只输出进程ID的名称,省略主类的名称;
-m 输出进程启动时传递给main函数的参数;
&nb
- java 位移运算与乘法运算
周凡杨
java位移运算乘法
对于 JAVA 编程中,适当的采用位移运算,会减少代码的运行时间,提高项目的运行效率。这个可以从一道面试题说起:
问题:
用最有效率的方法算出2 乘以8 等於几?”
答案:2 << 3
由此就引发了我的思考,为什么位移运算会比乘法运算更快呢?其实简单的想想,计算机的内存是用由 0 和 1 组成的二
- java中的枚举(enmu)
g21121
java
从jdk1.5开始,java增加了enum(枚举)这个类型,但是大家在平时运用中还是比较少用到枚举的,而且很多人和我一样对枚举一知半解,下面就跟大家一起学习下enmu枚举。先看一个最简单的枚举类型,一个返回类型的枚举:
public enum ResultType {
/**
* 成功
*/
SUCCESS,
/**
* 失败
*/
FAIL,
- MQ初级学习
510888780
activemq
1.下载ActiveMQ
去官方网站下载:http://activemq.apache.org/
2.运行ActiveMQ
解压缩apache-activemq-5.9.0-bin.zip到C盘,然后双击apache-activemq-5.9.0-\bin\activemq-admin.bat运行ActiveMQ程序。
启动ActiveMQ以后,登陆:http://localhos
- Spring_Transactional_Propagation
布衣凌宇
springtransactional
//事务传播属性
@Transactional(propagation=Propagation.REQUIRED)//如果有事务,那么加入事务,没有的话新创建一个
@Transactional(propagation=Propagation.NOT_SUPPORTED)//这个方法不开启事务
@Transactional(propagation=Propagation.REQUIREDS_N
- 我的spring学习笔记12-idref与ref的区别
aijuans
spring
idref用来将容器内其他bean的id传给<constructor-arg>/<property>元素,同时提供错误验证功能。例如:
<bean id ="theTargetBean" class="..." />
<bean id ="theClientBean" class=&quo
- Jqplot之折线图
antlove
jsjqueryWebtimeseriesjqplot
timeseriesChart.html
<script type="text/javascript" src="jslib/jquery.min.js"></script>
<script type="text/javascript" src="jslib/excanvas.min.js&
- JDBC中事务处理应用
百合不是茶
javaJDBC编程事务控制语句
解释事务的概念; 事务控制是sql语句中的核心之一;事务控制的作用就是保证数据的正常执行与异常之后可以恢复
事务常用命令:
Commit提交
- [转]ConcurrentHashMap Collections.synchronizedMap和Hashtable讨论
bijian1013
java多线程线程安全HashMap
在Java类库中出现的第一个关联的集合类是Hashtable,它是JDK1.0的一部分。 Hashtable提供了一种易于使用的、线程安全的、关联的map功能,这当然也是方便的。然而,线程安全性是凭代价换来的――Hashtable的所有方法都是同步的。此时,无竞争的同步会导致可观的性能代价。Hashtable的后继者HashMap是作为JDK1.2中的集合框架的一部分出现的,它通过提供一个不同步的
- ng-if与ng-show、ng-hide指令的区别和注意事项
bijian1013
JavaScriptAngularJS
angularJS中的ng-show、ng-hide、ng-if指令都可以用来控制dom元素的显示或隐藏。ng-show和ng-hide根据所给表达式的值来显示或隐藏HTML元素。当赋值给ng-show指令的值为false时元素会被隐藏,值为true时元素会显示。ng-hide功能类似,使用方式相反。元素的显示或
- 【持久化框架MyBatis3七】MyBatis3定义typeHandler
bit1129
TypeHandler
什么是typeHandler?
typeHandler用于将某个类型的数据映射到表的某一列上,以完成MyBatis列跟某个属性的映射
内置typeHandler
MyBatis内置了很多typeHandler,这写typeHandler通过org.apache.ibatis.type.TypeHandlerRegistry进行注册,比如对于日期型数据的typeHandler,
- 上传下载文件rz,sz命令
bitcarter
linux命令rz
刚开始使用rz上传和sz下载命令:
因为我们是通过secureCRT终端工具进行使用的所以会有上传下载这样的需求:
我遇到的问题:
sz下载A文件10M左右,没有问题
但是将这个文件A再传到另一天服务器上时就出现传不上去,甚至出现乱码,死掉现象,具体问题
解决方法:
上传命令改为;rz -ybe
下载命令改为:sz -be filename
如果还是有问题:
那就是文
- 通过ngx-lua来统计nginx上的虚拟主机性能数据
ronin47
ngx-lua 统计 解禁ip
介绍
以前我们为nginx做统计,都是通过对日志的分析来完成.比较麻烦,现在基于ngx_lua插件,开发了实时统计站点状态的脚本,解放生产力.项目主页: https://github.com/skyeydemon/ngx-lua-stats 功能
支持分不同虚拟主机统计, 同一个虚拟主机下可以分不同的location统计.
可以统计与query-times request-time
- java-68-把数组排成最小的数。一个正整数数组,将它们连接起来排成一个数,输出能排出的所有数字中最小的。例如输入数组{32, 321},则输出32132
bylijinnan
java
import java.util.Arrays;
import java.util.Comparator;
public class MinNumFromIntArray {
/**
* Q68输入一个正整数数组,将它们连接起来排成一个数,输出能排出的所有数字中最小的一个。
* 例如输入数组{32, 321},则输出这两个能排成的最小数字32132。请给出解决问题
- Oracle基本操作
ccii
Oracle SQL总结Oracle SQL语法Oracle基本操作Oracle SQL
一、表操作
1. 常用数据类型
NUMBER(p,s):可变长度的数字。p表示整数加小数的最大位数,s为最大小数位数。支持最大精度为38位
NVARCHAR2(size):变长字符串,最大长度为4000字节(以字符数为单位)
VARCHAR2(size):变长字符串,最大长度为4000字节(以字节数为单位)
CHAR(size):定长字符串,最大长度为2000字节,最小为1字节,默认
- [强人工智能]实现强人工智能的路线图
comsci
人工智能
1:创建一个用于记录拓扑网络连接的矩阵数据表
2:自动构造或者人工复制一个包含10万个连接(1000*1000)的流程图
3:将这个流程图导入到矩阵数据表中
4:在矩阵的每个有意义的节点中嵌入一段简单的
- 给Tomcat,Apache配置gzip压缩(HTTP压缩)功能
cwqcwqmax9
apache
背景:
HTTP 压缩可以大大提高浏览网站的速度,它的原理是,在客户端请求网页后,从服务器端将网页文件压缩,再下载到客户端,由客户端的浏览器负责解压缩并浏览。相对于普通的浏览过程HTML ,CSS,Javascript , Text ,它可以节省40%左右的流量。更为重要的是,它可以对动态生成的,包括CGI、PHP , JSP , ASP , Servlet,SHTML等输出的网页也能进行压缩,
- SpringMVC and Struts2
dashuaifu
struts2springMVC
SpringMVC VS Struts2
1:
spring3开发效率高于struts
2:
spring3 mvc可以认为已经100%零配置
3:
struts2是类级别的拦截, 一个类对应一个request上下文,
springmvc是方法级别的拦截,一个方法对应一个request上下文,而方法同时又跟一个url对应
所以说从架构本身上 spring3 mvc就容易实现r
- windows常用命令行命令
dcj3sjt126com
windowscmdcommand
在windows系统中,点击开始-运行,可以直接输入命令行,快速打开一些原本需要多次点击图标才能打开的界面,如常用的输入cmd打开dos命令行,输入taskmgr打开任务管理器。此处列出了网上搜集到的一些常用命令。winver 检查windows版本 wmimgmt.msc 打开windows管理体系结构(wmi) wupdmgr windows更新程序 wscrip
- 再看知名应用背后的第三方开源项目
dcj3sjt126com
ios
知名应用程序的设计和技术一直都是开发者需要学习的,同样这些应用所使用的开源框架也是不可忽视的一部分。此前《
iOS第三方开源库的吐槽和备忘》中作者ibireme列举了国内多款知名应用所使用的开源框架,并对其中一些框架进行了分析,同样国外开发者
@iOSCowboy也在博客中给我们列出了国外多款知名应用使用的开源框架。另外txx's blog中详细介绍了
Facebook Paper使用的第三
- Objective-c单例模式的正确写法
jsntghf
单例iosiPhone
一般情况下,可能我们写的单例模式是这样的:
#import <Foundation/Foundation.h>
@interface Downloader : NSObject
+ (instancetype)sharedDownloader;
@end
#import "Downloader.h"
@implementation
- jquery easyui datagrid 加载成功,选中某一行
hae
jqueryeasyuidatagrid数据加载
1.首先你需要设置datagrid的onLoadSuccess
$(
'#dg'
).datagrid({onLoadSuccess :
function
(data){
$(
'#dg'
).datagrid(
'selectRow'
,3);
}});
2.onL
- jQuery用户数字打分评价效果
ini
JavaScripthtmljqueryWebcss
效果体验:http://hovertree.com/texiao/jquery/5.htmHTML文件代码:
<!DOCTYPE html>
<html xmlns="http://www.w3.org/1999/xhtml">
<head>
<title>jQuery用户数字打分评分代码 - HoverTree</
- mybatis的paramType
kerryg
DAOsql
MyBatis传多个参数:
1、采用#{0},#{1}获得参数:
Dao层函数方法:
public User selectUser(String name,String area);
对应的Mapper.xml
<select id="selectUser" result
- centos 7安装mysql5.5
MrLee23
centos
首先centos7 已经不支持mysql,因为收费了你懂得,所以内部集成了mariadb,而安装mysql的话会和mariadb的文件冲突,所以需要先卸载掉mariadb,以下为卸载mariadb,安装mysql的步骤。
#列出所有被安装的rpm package rpm -qa | grep mariadb
#卸载
rpm -e mariadb-libs-5.
- 利用thrift来实现消息群发
qifeifei
thrift
Thrift项目一般用来做内部项目接偶用的,还有能跨不同语言的功能,非常方便,一般前端系统和后台server线上都是3个节点,然后前端通过获取client来访问后台server,那么如果是多太server,就是有一个负载均衡的方法,然后最后访问其中一个节点。那么换个思路,能不能发送给所有节点的server呢,如果能就
- 实现一个sizeof获取Java对象大小
teasp
javaHotSpot内存对象大小sizeof
由于Java的设计者不想让程序员管理和了解内存的使用,我们想要知道一个对象在内存中的大小变得比较困难了。本文提供了可以获取对象的大小的方法,但是由于各个虚拟机在内存使用上可能存在不同,因此该方法不能在各虚拟机上都适用,而是仅在hotspot 32位虚拟机上,或者其它内存管理方式与hotspot 32位虚拟机相同的虚拟机上 适用。
- SVN错误及处理
xiangqian0505
SVN提交文件时服务器强行关闭
在SVN服务控制台打开资源库“SVN无法读取current” ---摘自网络 写道 SVN无法读取current修复方法 Can't read file : End of file found
文件:repository/db/txn_current、repository/db/current
其中current记录当前最新版本号,txn_current记录版本库中版本