计算机视觉:使用opencv进行直线检测
1 直线检测介绍
在图像处理中,直线检测是一种常见的算法,它通常获取n个边缘点的集合,并找到通过这些边缘点的直线。其中用于直线检测,最为流行的检测器是基于霍夫变换的直线检测技术。
1.1 什么是霍夫变换
霍夫变换(Hough Transform)是图像处理中的一种特征提取方法,可以识别图像中的几何形状。它将在参数空间内进行投票来决定其物体形状,通过检测累计结果找到一极大值所对应的解,利用此解即可得到一个符合特定形状的参数。
1.2 霍夫变换原理
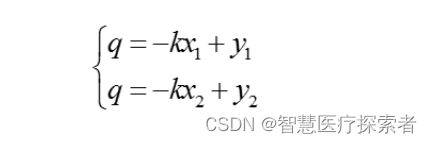
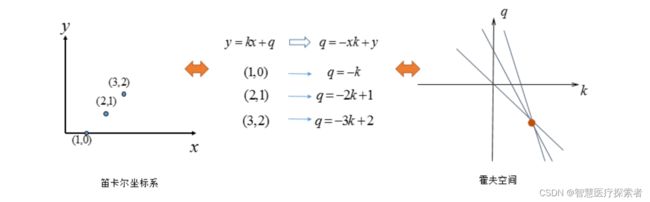
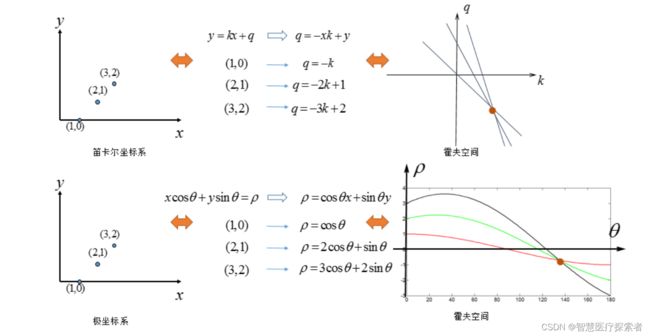
一条直线可由两个点A=(X1,Y1)和B=(X2,Y2)确定(笛卡尔坐标)

另一方面,y = kx + q 也可以写成关于(k,q)的函数表达式(霍夫空间):
对应的变换可以通过图形直观表示:
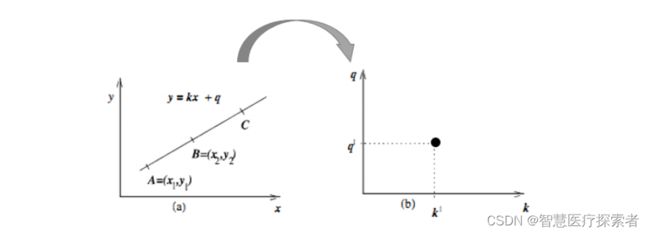
变换后的空间成为霍夫空间。即:笛卡尔坐标系中一条直线,对应霍夫空间的一个点。
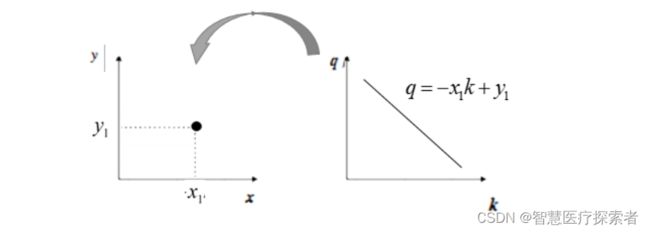
反过来同样成立(霍夫空间的一条直线,对应笛卡尔坐标系的一个点):
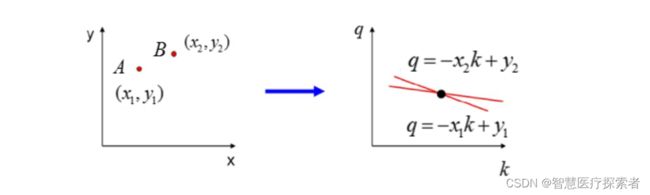
再来看看A、B两个点,对应霍夫空间的情形:
接下来,再看一下三个点共线的情况:
可以看出如果笛卡尔坐标系的点共线,这些点在霍夫空间对应的直线交于一点:这也是必然,共线只有一种取值可能。
如果不止一条直线呢?再看看多个点的情况(有两条直线):
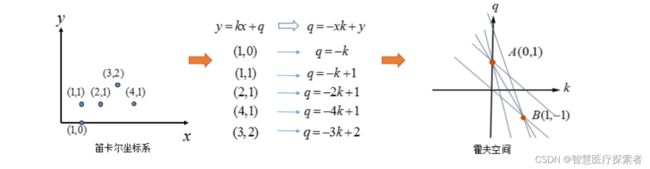
其实(3,2)与(4,1)也可以组成直线,只不过它有两个点确定,而图中A、B两点是由三条直线汇成,这也是霍夫变换的后处理的基本方式:选择由尽可能多直线汇成的点。
霍夫空间:选择由三条交汇直线确定的点(中间图),对应的笛卡尔坐标系的直线(右图)。
 到这里问题似乎解决了,已经完成了霍夫变换的求解,但是如果像下图这种情况呢?
到这里问题似乎解决了,已经完成了霍夫变换的求解,但是如果像下图这种情况呢?
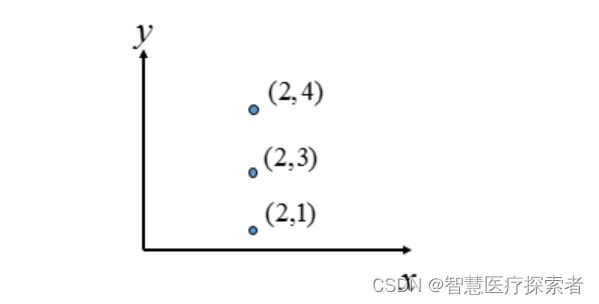
k=∞是不方便表示的,而且q怎么取值呢,这样不是办法。因此考虑将笛卡尔坐标系换为:极坐标表示。
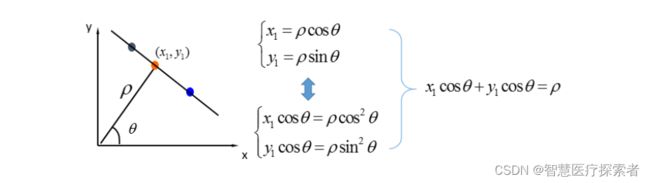
在极坐标系下,其实是一样的:极坐标的点→霍夫空间的直线,只不过霍夫空间不再是[k,q]的参数,而是![]() 的参数,给出对比图:
的参数,给出对比图:
2 使用opencv进行直线检测
在使用霍夫变换侦测直线前,须先利用边缘检测算法来减少图像的数据量、剔掉不相关的信息,保留图像中重要的结构特征。
2.1 图像灰度化
原始图像与灰度化的图像如下:

2.2 边缘检测
利用边缘检测算法(Canny、Sobel、Laplacian等)来检测物体边缘,代码如下:
canny = cv2.Canny(gray_img, 30, 150)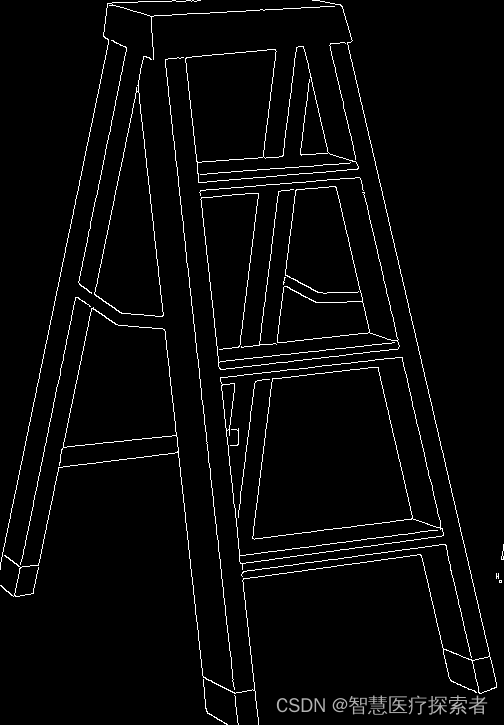
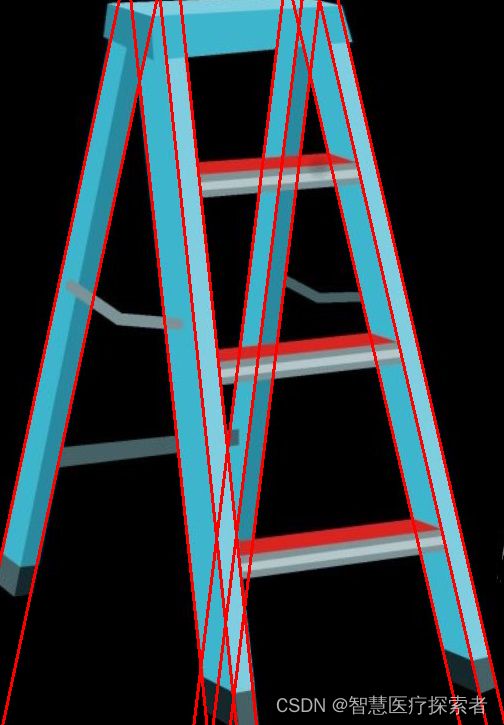
2.3 霍夫变换
使用霍夫变换来得出直线检测结果,代码如下:
lines = cv2.HoughLines(canny, 1, np.pi / 180, 180)
lines1 = lines[:, 0, :]
for rho, theta in lines1[:]:
a = np.cos(theta)
b = np.sin(theta)
x0 = a * rho
y0 = b * rho
x1 = int(x0 + 3000 * (-b))
y1 = int(y0 + 3000 * (a))
x2 = int(x0 - 3000 * (-b))
y2 = int(y0 - 3000 * (a))
cv2.line(im, (x1, y1), (x2, y2), (0, 0, 255), 2)运行结果显示如下:
2.4 完整代码
import cv2
import numpy as np
im = cv2.imread("../data/ladder.jpg")
cv2.imshow('original', im)
cv2.waitKey(0)
gray_img = cv2.cvtColor(im, cv2.COLOR_BGR2GRAY)
cv2.imshow('gray', gray_img)
cv2.waitKey(0)
canny = cv2.Canny(gray_img, 30, 150)
cv2.imshow('canny', canny)
cv2.waitKey(0)
lines = cv2.HoughLines(canny, 1, np.pi / 180, 180)
lines1 = lines[:, 0, :]
for rho, theta in lines1[:]:
a = np.cos(theta)
b = np.sin(theta)
x0 = a * rho
y0 = b * rho
x1 = int(x0 + 3000 * (-b))
y1 = int(y0 + 3000 * (a))
x2 = int(x0 - 3000 * (-b))
y2 = int(y0 - 3000 * (a))
cv2.line(im, (x1, y1), (x2, y2), (0, 0, 255), 2)
cv2.imshow('original', im)
cv2.waitKey(0)3 使用opencv检测倾角
import cv2
import numpy as np
def line_detect(image):
# 将图片转换为HSV
hsv = cv2.cvtColor(image, cv2.COLOR_BGR2HSV)
# 设置阈值
lowera = np.array([0, 0, 221])
uppera = np.array([180, 30, 255])
mask1 = cv2.inRange(hsv, lowera, uppera)
kernel = np.ones((3, 3), np.uint8)
# 对得到的图像进行形态学操作(闭运算和开运算)
mask = cv2.morphologyEx(mask1, cv2.MORPH_CLOSE, kernel) #闭运算:表示先进行膨胀操作,再进行腐蚀操作
mask = cv2.morphologyEx(mask, cv2.MORPH_OPEN, kernel) #开运算:表示的是先进行腐蚀,再进行膨胀操作
# 绘制轮廓
edges = cv2.Canny(mask, 50, 150, apertureSize=3)
# 显示图片
cv2.imshow("edges", edges)
# 检测白线 这里是设置检测直线的条件,可以去读一读HoughLinesP()函数,然后根据自己的要求设置检测条件
lines = cv2.HoughLinesP(edges, 1, np.pi / 180, 40,minLineLength=10,maxLineGap=10)
print "lines=",lines
print "========================================================"
i=1
# 对通过霍夫变换得到的数据进行遍历
for line in lines:
# newlines1 = lines[:, 0, :]
print "line["+str(i-1)+"]=",line
x1,y1,x2,y2 = line[0] #两点确定一条直线,这里就是通过遍历得到的两个点的数据 (x1,y1)(x2,y2)
cv2.line(image,(x1,y1),(x2,y2),(0,0,255),2) #在原图上画线
# 转换为浮点数,计算斜率
x1 = float(x1)
x2 = float(x2)
y1 = float(y1)
y2 = float(y2)
print "x1=%s,x2=%s,y1=%s,y2=%s" % (x1, x2, y1, y2)
if x2 - x1 == 0:
print "直线是竖直的"
result=90
elif y2 - y1 == 0 :
print "直线是水平的"
result=0
else:
# 计算斜率
k = -(y2 - y1) / (x2 - x1)
# 求反正切,再将得到的弧度转换为度
result = np.arctan(k) * 57.29577
print "直线倾斜角度为:" + str(result) + "度"
i = i+1
# 显示最后的成果图
cv2.imshow("line_detect",image)
return result
if __name__ == '__main__':
# 读入图片
src = cv2.imread("lines/line6.jpg")
# 设置窗口大小
cv2.namedWindow("input image", cv2.WINDOW_AUTOSIZE)
# 显示原始图片
cv2.imshow("input image", src)
# 调用函数
line_detect(src)
cv2.waitKey(0)