PCL 点云与深度图的变换与曲面重建
背景:
有时候我们获取的点云数据是从一个视点获取的,为了使用深度图相关的计算方法,以提高效率,我们需要将点云数据转换为深度图。这两种数据的主要区别在于,点云数据需要通过k-d tree等索引来对数据进行检索,而深度图像和图像类似,可以通过上下左右等近邻来直接进行索引。本例程就是将点云数据转换为深度图像,进而使用PCL内部只适用于深度图的算法来进行曲面重建等。
代码(详细注释):
#include
#include
#include
#include
#include
#include
#include
#include
#include
#include
#include
#include
#include
#include
#include
#include
#include
#include
#include
#include
#include //保存深度图像
#include //保存深度图像
using namespace pcl::console;
int main (int argc, char** argv) {
// Generate the data
if (argc<2)
{
print_error ("Syntax is: %s input.pcd -w 640 -h 480 -cx 320 -cy 240 -fx 525 -fy 525 -type 0 -size 2\n", argv[0]);
print_info (" where options are:\n");
print_info (" -w X = width of detph iamge ");
return -1;
}
std::string filename = argv[1];//将命令行的第二个参数传给filename
//默认的参数
int width=640,height=480,size=2,type=0;
float fx=525,fy=525,cx=320,cy=240;
//命令行解析
//可以在命令行输入附加参数
parse_argument (argc, argv, "-w", width);//深度图像宽度
parse_argument (argc, argv, "-h", height);//深度图像高度
parse_argument (argc, argv, "-cx", cx);//光轴在深度图像上的x坐标
parse_argument (argc, argv, "-cy", cy);//光轴在深度图像上的y坐标
parse_argument (argc, argv, "-fx", fx);//水平方向焦距
parse_argument (argc, argv, "-fy", fy);//垂直方向焦距
parse_argument (argc, argv, "-type", type);//曲面重建时三角化的方式
parse_argument (argc, argv, "-size", size);//曲面重建时的面片的大小
//convert unorignized point cloud to orginized point cloud begin
pcl::PointCloud::Ptr cloud (new pcl::PointCloud);
pcl::PointCloud::Ptr cloud_in(new pcl::PointCloud);
pcl::io::loadPCDFile (filename, *cloud);//将命令行的第二个参数传递给filename之后,将filename对应的pcd文件读入
pcl::io::loadPCDFile(filename,*cloud_in);
print_info ("Read pcd file successfully\n");//读入成功标志
//设置sensor_pose和coordinate_frame
Eigen::Affine3f sensorPose;//设置相机位姿
sensorPose.setIdentity(); //成像时遵循的坐标系统
pcl::RangeImage::CoordinateFrame coordinate_frame = pcl::RangeImage::CAMERA_FRAME;
float noiseLevel=0.00;//设置噪声水平
float minRange = 0.0f;//成像时考虑该阈值外的点
pcl::RangeImagePlanar::Ptr rangeImage(new pcl::RangeImagePlanar);
rangeImage->createFromPointCloudWithFixedSize(*cloud,width,height,cx,cy,fx,fy,sensorPose,coordinate_frame);
std::cout << rangeImage << "\n";
//convert unorignized point cloud to orginized point cloud end
//保存深度图像
float *ranges = rangeImage->getRangesArray();
unsigned char* rgb_image = pcl::visualization::FloatImageUtils::getVisualImage(ranges,rangeImage->width,rangeImage->height);
pcl::io::saveRgbPNGFile("rangeImage.png",rgb_image,rangeImage->width,rangeImage->height);
std::cerr<<"rangeImage.png Saved!"<::Ptr tri(new pcl::OrganizedFastMesh);
pcl::search::KdTree::Ptr tree (new pcl::search::KdTree);
tree->setInputCloud(rangeImage);//用到了C++赋值兼容原则,派生类的指针可以赋值给基类的指针
pcl::PolygonMesh triangles;//多边形Mesh
tri->setTrianglePixelSize(size);//曲面重建的精细程度
tri->setInputCloud(rangeImage);//设置输入的深度图像
tri->setSearchMethod(tree);//设置搜索方式
tri->setTriangulationType((pcl::OrganizedFastMesh::TriangulationType)type);//设置三角化的类型,是一个枚举类型,将命令行输入的type值进行强制类型转换至对应的三角化的类型
tri->reconstruct(triangles);//重建结果传送至triangles
//可视化
boost::shared_ptr viewer (new pcl::visualization::PCLVisualizer ("PCL"));
//可视化重建结果 ViewPort v1
int v1(0);
viewer->createViewPort(0,0,0.5,1,v1);
viewer->setBackgroundColor(0.5,0.5,0.5,v1);
viewer->addPolygonMesh(triangles,"tin",v1);
//可视化原始点云
int v2(0);
viewer->createViewPort(0.5,0,1,1,v2);
viewer->setBackgroundColor(0,128,0,v2);
pcl::visualization::PointCloudColorHandlerCustom color1(cloud_in,190,0,0);
viewer->addPointCloud(cloud_in,color1,"cloud_in",v2);
viewer->addCoordinateSystem();
while (!range_image_widget.wasStopped ()&&!viewer->wasStopped())
{
range_image_widget.spinOnce ();
pcl_sleep (0.01);
viewer->spinOnce ();
}
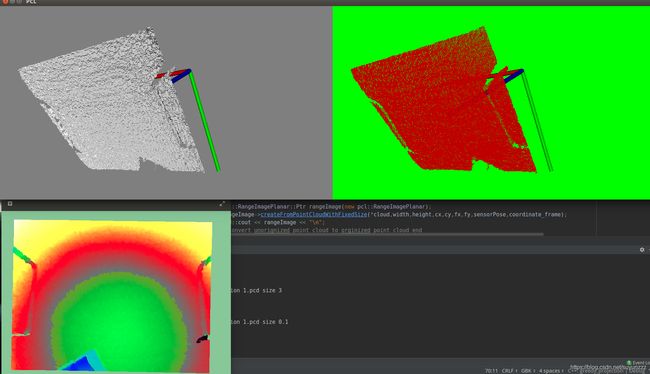
} 可视化:
(左上为重建后的曲面、右上为原点云、左下为深度图)