ROS 笔记(04)— 创建工作空间与功能包、package.xml、CMakelists.txt
1. 工作空间
工作空间 workspace 是一个存放工程开发相关文件的文件夹,主要由以下几个部分组成:
src:代码空间Source Space,存放功能包,所有功能包的代码及配置文件;build:编译空间Build Space,存放编译过程中产生的中间文件;devel:开发空间Development Space,存放编译生成的可执行文件,包括一些脚本;install:安装空间Install Space,安装指定的目标位置;
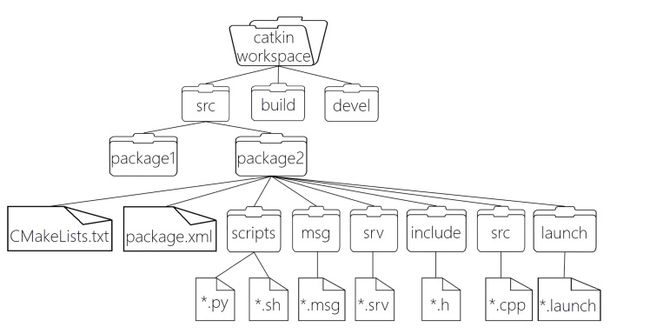
ROS 文件系统级指的是在硬盘上 ROS 源代码的组织形式,其结构大致可以如下图所示:
WorkSpace --- 自定义的工作空间
|--- build:编译空间,用于存放CMake和catkin的缓存信息、配置信息和其他中间文件。
|--- devel:开发空间,用于存放编译后生成的目标文件,包括头文件、动态&静态链接库、可执行文件等。
|--- src: 源码
|-- package:功能包(ROS基本单元)包含多个节点、库与配置文件,包名所有字母小写,只能由字母、数字与下划线组成
|-- CMakeLists.txt 配置编译规则,比如源文件、依赖项、目标文件
|-- package.xml 包信息,比如:包名、版本、作者、依赖项...(以前版本是 manifest.xml)
|-- scripts 存储python文件
|-- src 存储C++源文件
|-- include 头文件
|-- msg 消息通信格式文件
|-- srv 服务通信格式文件
|-- action 动作格式文件
|-- launch 可一次性运行多个节点
|-- config 配置信息
|-- CMakeLists.txt: 编译的基本配置
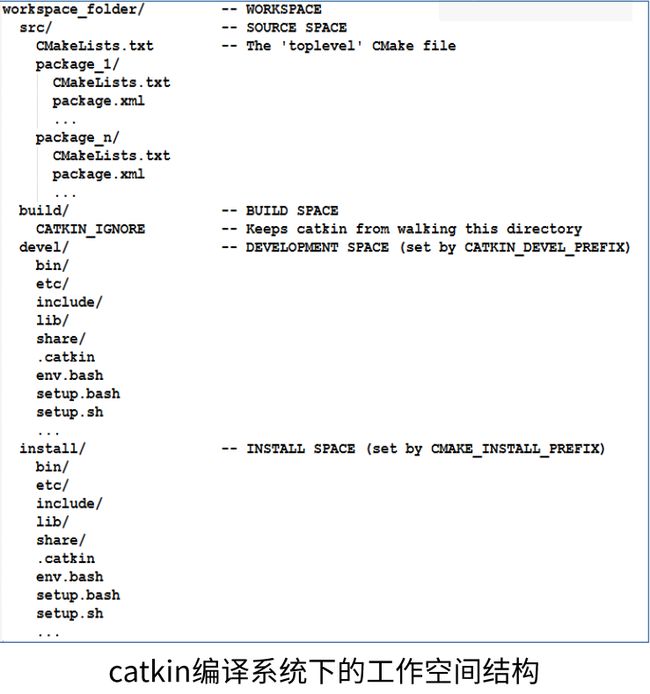
catkin 编译系统下的工作空间结构:
2. 创建工作空间
2.1 创建空间
创建空间所用到的命令
$ mkdir -p ~/catkin_ws/src
$ cd ~/catkin_ws/src
$ catkin_init_workspace
其中,catkin_ws 目录名可以任意命名,输入 catkin_init_workspace 命令时可以使用 Tab 键自动联想功能,完整示例过程如下:
wohu@wohu-pc:~/project/ros$ mkdir -p ./ros_demo/src
wohu@wohu-pc:~/project/ros$ cd ./ros_demo/src/
wohu@wohu-pc:~/project/ros/ros_demo/src$ catkin_init_workspace
Creating symlink "/home/wohu/project/ros/ros_demo/src/CMakeLists.txt" pointing to "/opt/ros/melodic/share/catkin/cmake/toplevel.cmake"
2.2 编译工作空间
使用到的命令如下:
$ cd ~/catkin_ws/
$ catkin_make
示例过程如下:
$ catkin_make
Base path: /home/wohu/project/ros/ros_demo
Source space: /home/wohu/project/ros/ros_demo/src
Build space: /home/wohu/project/ros/ros_demo/build
Devel space: /home/wohu/project/ros/ros_demo/devel
Install space: /home/wohu/project/ros/ros_demo/install
####
#### Running command: "cmake /home/wohu/project/ros/ros_demo/src -DCATKIN_DEVEL_PREFIX=/home/wohu/project/ros/ros_demo/devel -DCMAKE_INSTALL_PREFIX=/home/wohu/project/ros/ros_demo/install -G Unix Makefiles" in "/home/wohu/project/ros/ros_demo/build"
####
-- The C compiler identification is GNU 7.5.0
-- The CXX compiler identification is GNU 7.5.0
-- Check for working C compiler: /usr/bin/cc
-- Check for working C compiler: /usr/bin/cc -- works
-- Detecting C compiler ABI info
-- Detecting C compiler ABI info - done
-- Detecting C compile features
-- Detecting C compile features - done
-- Check for working CXX compiler: /usr/bin/c++
-- Check for working CXX compiler: /usr/bin/c++ -- works
-- Detecting CXX compiler ABI info
-- Detecting CXX compiler ABI info - done
-- Detecting CXX compile features
-- Detecting CXX compile features - done
-- Using CATKIN_DEVEL_PREFIX: /home/wohu/project/ros/ros_demo/devel
-- Using CMAKE_PREFIX_PATH: /opt/ros/melodic
-- This workspace overlays: /opt/ros/melodic
-- Found PythonInterp: /usr/bin/python2 (found suitable version "2.7.17", minimum required is "2")
-- Using PYTHON_EXECUTABLE: /usr/bin/python2
-- Using Debian Python package layout
-- Using empy: /usr/bin/empy
-- Using CATKIN_ENABLE_TESTING: ON
-- Call enable_testing()
-- Using CATKIN_TEST_RESULTS_DIR: /home/wohu/project/ros/ros_demo/build/test_results
-- Found gtest sources under '/usr/src/googletest': gtests will be built
-- Found gmock sources under '/usr/src/googletest': gmock will be built
-- Found PythonInterp: /usr/bin/python2 (found version "2.7.17")
-- Looking for pthread.h
-- Looking for pthread.h - found
-- Looking for pthread_create
-- Looking for pthread_create - not found
-- Looking for pthread_create in pthreads
-- Looking for pthread_create in pthreads - not found
-- Looking for pthread_create in pthread
-- Looking for pthread_create in pthread - found
-- Found Threads: TRUE
-- Using Python nosetests: /usr/bin/nosetests-2.7
-- catkin 0.7.29
-- BUILD_SHARED_LIBS is on
-- BUILD_SHARED_LIBS is on
-- Configuring done
-- Generating done
-- Build files have been written to: /home/wohu/project/ros/ros_demo/build
####
#### Running command: "make -j12 -l12" in "/home/wohu/project/ros/ros_demo/build"
####
wohu@wohu-pc:~/project/ros/ros_demo$
2.3 设置环境变量
$ source devel/setup.bash
2.4 检查环境变量
$ echo #ROS_PACKAGE_PATH
示例如下:
$ echo $ROS_PACKAGE_PATH
/home/wohu/project/ros/ros_demo/src:/opt/ros/melodic/share
wohu@wohu-pc:~/project/ros/ros_demo$
以上步骤完成后,生成的整体目录文件结构如下:
build 目录文件如下:

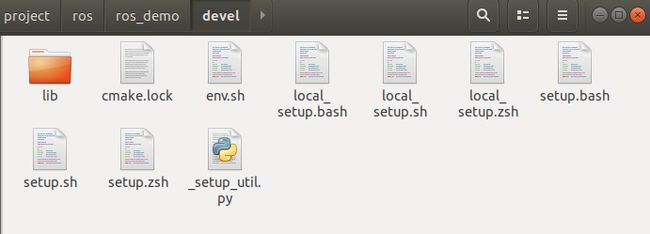
devel 目录文件如下:
3. 创建功能包
3.1 创建功能包
$ cd ~/catkin_ws/src
$ catkin_create_pkg <package_name> [depend1] [depend2] [depend3]
完整示例命令如下:
$ catkin_create_pkg test_pkg std_msgs rospy roscpp
Created file test_pkg/package.xml
Created file test_pkg/CMakeLists.txt
Created folder test_pkg/include/test_pkg
Created folder test_pkg/src
Successfully created files in /home/wohu/project/ros/ros_demo/src/test_pkg. Please adjust the values in package.xml.
wohu@wohu-pc:~/project/ros/ros_demo/src$
功能包目录结构:
3.2 编译功能包
$ cd ~/catkin_ws
$ catkin_make
$ source ~/catkin_ws/devel/setup.bash
示例过程如下:
wohu@wohu-pc:~/project/ros/ros_demo/src$ cd ../
wohu@wohu-pc:~/project/ros/ros_demo$ ls
build devel src
wohu@wohu-pc:~/project/ros/ros_demo$ catkin_make
Base path: /home/wohu/project/ros/ros_demo
Source space: /home/wohu/project/ros/ros_demo/src
Build space: /home/wohu/project/ros/ros_demo/build
Devel space: /home/wohu/project/ros/ros_demo/devel
Install space: /home/wohu/project/ros/ros_demo/install
####
#### Running command: "cmake /home/wohu/project/ros/ros_demo/src -DCATKIN_DEVEL_PREFIX=/home/wohu/project/ros/ros_demo/devel -DCMAKE_INSTALL_PREFIX=/home/wohu/project/ros/ros_demo/install -G Unix Makefiles" in "/home/wohu/project/ros/ros_demo/build"
####
-- Using CATKIN_DEVEL_PREFIX: /home/wohu/project/ros/ros_demo/devel
-- Using CMAKE_PREFIX_PATH: /home/wohu/project/ros/ros_demo/devel;/opt/ros/melodic
-- This workspace overlays: /home/wohu/project/ros/ros_demo/devel;/opt/ros/melodic
-- Found PythonInterp: /usr/bin/python2 (found suitable version "2.7.17", minimum required is "2")
-- Using PYTHON_EXECUTABLE: /usr/bin/python2
-- Using Debian Python package layout
-- Using empy: /usr/bin/empy
-- Using CATKIN_ENABLE_TESTING: ON
-- Call enable_testing()
-- Using CATKIN_TEST_RESULTS_DIR: /home/wohu/project/ros/ros_demo/build/test_results
-- Found gtest sources under '/usr/src/googletest': gtests will be built
-- Found gmock sources under '/usr/src/googletest': gmock will be built
-- Found PythonInterp: /usr/bin/python2 (found version "2.7.17")
-- Using Python nosetests: /usr/bin/nosetests-2.7
-- catkin 0.7.29
-- BUILD_SHARED_LIBS is on
-- BUILD_SHARED_LIBS is on
-- ~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~
-- ~~ traversing 1 packages in topological order:
-- ~~ - test_pkg
-- ~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~
-- +++ processing catkin package: 'test_pkg'
-- ==> add_subdirectory(test_pkg)
-- Configuring done
-- Generating done
-- Build files have been written to: /home/wohu/project/ros/ros_demo/build
####
#### Running command: "make -j12 -l12" in "/home/wohu/project/ros/ros_demo/build"
####
wohu@wohu-pc:~/project/ros/ros_demo$ source ./devel/setup.bash
注意:
- 同一个工作空间下,不允许存在同名的功能包;
- 不同工作空间下,可以允许存在同名功能包;
4. package.xml
该文件定义有关软件包的属性,例如软件包名称,版本号,作者,维护者以及对其他catkin软件包的依赖性。
<package format="2">
<name>demo01_hello_vscodename>
<version>0.0.0version>
<description>The demo01_hello_vscode packagedescription>
<maintainer email="[email protected]">xuzuomaintainer>
<license>TODOlicense>
<buildtool_depend>catkinbuildtool_depend>
<build_depend>roscppbuild_depend>
<build_depend>rospybuild_depend>
<build_depend>std_msgsbuild_depend>
<build_export_depend>roscppbuild_export_depend>
<build_export_depend>rospybuild_export_depend>
<build_export_depend>std_msgsbuild_export_depend>
<exec_depend>roscppexec_depend>
<exec_depend>rospyexec_depend>
<exec_depend>std_msgsexec_depend>
<export>
export>
package>
5. CMakelists.txt
文件CMakeLists.txt是CMake构建系统的输入,用于构建软件包。任何兼容CMake的软件包都包含一个或多个CMakeLists.txt文件,这些文件描述了如何构建代码以及将代码安装到何处。
cmake_minimum_required(VERSION 3.0.2) #所需 cmake 版本
project(demo01_hello_vscode) #包名称,会被 ${PROJECT_NAME} 的方式调用
## Compile as C++11, supported in ROS Kinetic and newer
# add_compile_options(-std=c++11)
## Find catkin macros and libraries
## if COMPONENTS list like find_package(catkin REQUIRED COMPONENTS xyz)
## is used, also find other catkin packages
#设置构建所需要的软件包
find_package(catkin REQUIRED COMPONENTS
roscpp
rospy
std_msgs
)
## System dependencies are found with CMake's conventions
#默认添加系统依赖
# find_package(Boost REQUIRED COMPONENTS system)
## Uncomment this if the package has a setup.py. This macro ensures
## modules and global scripts declared therein get installed
## See http://ros.org/doc/api/catkin/html/user_guide/setup_dot_py.html
# 启动 python 模块支持
# catkin_python_setup()
################################################
## Declare ROS messages, services and actions ##
## 声明 ROS 消息、服务、动作... ##
################################################
## To declare and build messages, services or actions from within this
## package, follow these steps:
## * Let MSG_DEP_SET be the set of packages whose message types you use in
## your messages/services/actions (e.g. std_msgs, actionlib_msgs, ...).
## * In the file package.xml:
## * add a build_depend tag for "message_generation"
## * add a build_depend and a exec_depend tag for each package in MSG_DEP_SET
## * If MSG_DEP_SET isn't empty the following dependency has been pulled in
## but can be declared for certainty nonetheless:
## * add a exec_depend tag for "message_runtime"
## * In this file (CMakeLists.txt):
## * add "message_generation" and every package in MSG_DEP_SET to
## find_package(catkin REQUIRED COMPONENTS ...)
## * add "message_runtime" and every package in MSG_DEP_SET to
## catkin_package(CATKIN_DEPENDS ...)
## * uncomment the add_*_files sections below as needed
## and list every .msg/.srv/.action file to be processed
## * uncomment the generate_messages entry below
## * add every package in MSG_DEP_SET to generate_messages(DEPENDENCIES ...)
## Generate messages in the 'msg' folder
# add_message_files(
# FILES
# Message1.msg
# Message2.msg
# )
## Generate services in the 'srv' folder
# add_service_files(
# FILES
# Service1.srv
# Service2.srv
# )
## Generate actions in the 'action' folder
# add_action_files(
# FILES
# Action1.action
# Action2.action
# )
## Generate added messages and services with any dependencies listed here
# 生成消息、服务时的依赖包
# generate_messages(
# DEPENDENCIES
# std_msgs
# )
################################################
## Declare ROS dynamic reconfigure parameters ##
## 声明 ROS 动态参数配置 ##
################################################
## To declare and build dynamic reconfigure parameters within this
## package, follow these steps:
## * In the file package.xml:
## * add a build_depend and a exec_depend tag for "dynamic_reconfigure"
## * In this file (CMakeLists.txt):
## * add "dynamic_reconfigure" to
## find_package(catkin REQUIRED COMPONENTS ...)
## * uncomment the "generate_dynamic_reconfigure_options" section below
## and list every .cfg file to be processed
## Generate dynamic reconfigure parameters in the 'cfg' folder
# generate_dynamic_reconfigure_options(
# cfg/DynReconf1.cfg
# cfg/DynReconf2.cfg
# )
###################################
## catkin specific configuration ##
## catkin 特定配置##
###################################
## The catkin_package macro generates cmake config files for your package
## Declare things to be passed to dependent projects
## INCLUDE_DIRS: uncomment this if your package contains header files
## LIBRARIES: libraries you create in this project that dependent projects also need
## CATKIN_DEPENDS: catkin_packages dependent projects also need
## DEPENDS: system dependencies of this project that dependent projects also need
# 运行时依赖
catkin_package(
# INCLUDE_DIRS include
# LIBRARIES demo01_hello_vscode
# CATKIN_DEPENDS roscpp rospy std_msgs
# DEPENDS system_lib
)
###########
## Build ##
###########
## Specify additional locations of header files
## Your package locations should be listed before other locations
# 添加头文件路径,当前程序包的头文件路径位于其他文件路径之前
include_directories(
# include
${catkin_INCLUDE_DIRS}
)
## Declare a C++ library
# 声明 C++ 库
# add_library(${PROJECT_NAME}
# src/${PROJECT_NAME}/demo01_hello_vscode.cpp
# )
## Add cmake target dependencies of the library
## as an example, code may need to be generated before libraries
## either from message generation or dynamic reconfigure
# 添加库的 cmake 目标依赖
# add_dependencies(${PROJECT_NAME} ${${PROJECT_NAME}_EXPORTED_TARGETS} ${catkin_EXPORTED_TARGETS})
## Declare a C++ executable
## With catkin_make all packages are built within a single CMake context
## The recommended prefix ensures that target names across packages don't collide
# 声明 C++ 可执行文件
add_executable(Hello_VSCode src/Hello_VSCode.cpp)
## Rename C++ executable without prefix
## The above recommended prefix causes long target names, the following renames the
## target back to the shorter version for ease of user use
## e.g. "rosrun someones_pkg node" instead of "rosrun someones_pkg someones_pkg_node"
#重命名c++可执行文件
# set_target_properties(${PROJECT_NAME}_node PROPERTIES OUTPUT_NAME node PREFIX "")
## Add cmake target dependencies of the executable
## same as for the library above
#添加可执行文件的 cmake 目标依赖
add_dependencies(Hello_VSCode ${${PROJECT_NAME}_EXPORTED_TARGETS} ${catkin_EXPORTED_TARGETS})
## Specify libraries to link a library or executable target against
#指定库、可执行文件的链接库
target_link_libraries(Hello_VSCode
${catkin_LIBRARIES}
)
#############
## Install ##
## 安装 ##
#############
# all install targets should use catkin DESTINATION variables
# See http://ros.org/doc/api/catkin/html/adv_user_guide/variables.html
## Mark executable scripts (Python etc.) for installation
## in contrast to setup.py, you can choose the destination
#设置用于安装的可执行脚本
catkin_install_python(PROGRAMS
scripts/Hi.py
DESTINATION ${CATKIN_PACKAGE_BIN_DESTINATION}
)
## Mark executables for installation
## See http://docs.ros.org/melodic/api/catkin/html/howto/format1/building_executables.html
# install(TARGETS ${PROJECT_NAME}_node
# RUNTIME DESTINATION ${CATKIN_PACKAGE_BIN_DESTINATION}
# )
## Mark libraries for installation
## See http://docs.ros.org/melodic/api/catkin/html/howto/format1/building_libraries.html
# install(TARGETS ${PROJECT_NAME}
# ARCHIVE DESTINATION ${CATKIN_PACKAGE_LIB_DESTINATION}
# LIBRARY DESTINATION ${CATKIN_PACKAGE_LIB_DESTINATION}
# RUNTIME DESTINATION ${CATKIN_GLOBAL_BIN_DESTINATION}
# )
## Mark cpp header files for installation
# install(DIRECTORY include/${PROJECT_NAME}/
# DESTINATION ${CATKIN_PACKAGE_INCLUDE_DESTINATION}
# FILES_MATCHING PATTERN "*.h"
# PATTERN ".svn" EXCLUDE
# )
## Mark other files for installation (e.g. launch and bag files, etc.)
# install(FILES
# # myfile1
# # myfile2
# DESTINATION ${CATKIN_PACKAGE_SHARE_DESTINATION}
# )
#############
## Testing ##
#############
## Add gtest based cpp test target and link libraries
# catkin_add_gtest(${PROJECT_NAME}-test test/test_demo01_hello_vscode.cpp)
# if(TARGET ${PROJECT_NAME}-test)
# target_link_libraries(${PROJECT_NAME}-test ${PROJECT_NAME})
# endif()
## Add folders to be run by python nosetests
# catkin_add_nosetests(test)