STM32-GPIO
一、GPIO简介
·GPIO(General Purpose Input Output)通用输入输出口
·可配置8种输入输出模式
·引脚电平:0V~3.3V,部分引脚可容忍5V
·输出模式下:可控制端口输出高低电平,用以驱动LED、控制蜂鸣器、模拟通信协议输出时序等
·输入模式下:可读取端口的高低电平或电压,用于读取按键输入、外界模块电平信号输入、ADC电压采集、模拟通信协议接收数据等
二、GPIO结构

三、GPIO位结构

四、GPIO模式

4.1 浮空/上拉/下拉输入
(GPIO_Mode_IN_FLOATING/GPIO_Mode_IPU/GPIO_Mode_IPD)

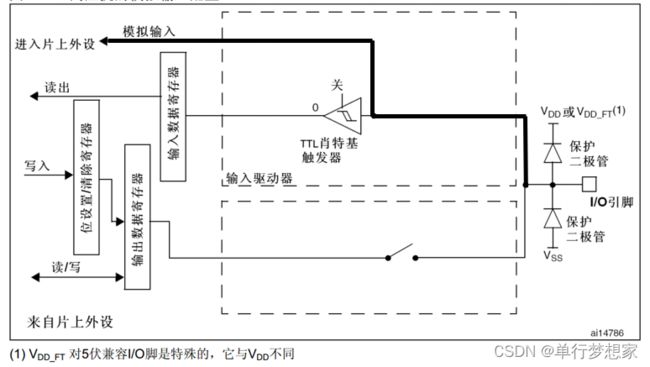
4.2 模拟输入(GPIO_Mode_AIN)
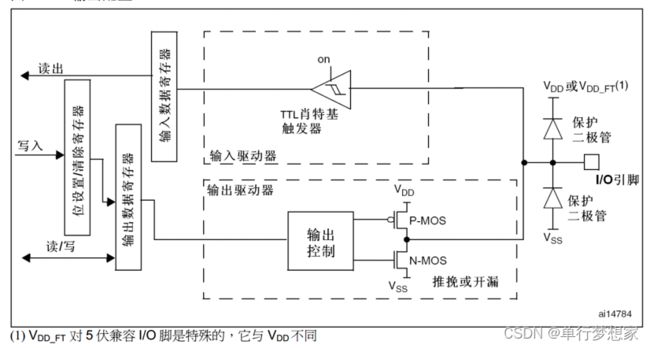
 4.3 开漏/推挽输出
4.3 开漏/推挽输出
(GPIO_Mode_Out_OD/GPIO_Mode_Out_PP)
4.4 复用开漏/推挽输出
(GPIO_Mode_AF_OD/GPIO_Mode_AF_PP)

五、GPIO库函数
void GPIO_DeInit(GPIO_TypeDef* GPIOx);//复位GPIO外设
void GPIO_Init(GPIO_TypeDef* GPIOx, GPIO_InitTypeDef* GPIO_InitStruct);//初始化GPIO
void GPIO_StructInit(GPIO_InitTypeDef* GPIO_InitStruct);//给结构体赋默认值GPIO读取函数
uint8_t GPIO_ReadInputDataBit(GPIO_TypeDef* GPIOx, uint16_t GPIO_Pin);//读取输入数据寄存器某一个端口的输入值
uint16_t GPIO_ReadInputData(GPIO_TypeDef* GPIOx);//读取整个输入数据寄存器,返回一个16位的数据
uint8_t GPIO_ReadOutputDataBit(GPIO_TypeDef* GPIOx, uint16_t GPIO_Pin);//读取输出数据寄存器某一个端口的输入值(输出模式)
uint16_t GPIO_ReadOutputData(GPIO_TypeDef* GPIOx);//读取整个输出数据寄存器
GPIO写入函数
void GPIO_SetBits(GPIO_TypeDef* GPIOx, uint16_t GPIO_Pin);//设置高电平
void GPIO_ResetBits(GPIO_TypeDef* GPIOx, uint16_t GPIO_Pin);//设置低电平
void GPIO_WriteBit(GPIO_TypeDef* GPIOx, uint16_t GPIO_Pin, BitAction BitVal);
void GPIO_Write(GPIO_TypeDef* GPIOx, uint16_t PortVal);void GPIO_PinLockConfig(GPIO_TypeDef* GPIOx, uint16_t GPIO_Pin);
//锁定GPIO配置,防止意外更改
六、实验(GPIO输出)
6.1 LED闪烁
#include "stm32f10x.h" // Device header
#include "Delay.h"
int main(void)
{
//一、使用RCC开启GPIO时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA,ENABLE);
//二、使用GPIO_Init函数初始化GPIO
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_1;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA,&GPIO_InitStructure);
while (1)
{
//=====one:GPIO_WriteBit=====//
// GPIO_WriteBit(GPIOA,GPIO_Pin_0,Bit_RESET);
// Delay_ms(500);
// GPIO_WriteBit(GPIOA,GPIO_Pin_0,Bit_SET);
// Delay_ms(500);
//=====two:GPIO_WriteBit 0/1=====//
// GPIO_WriteBit(GPIOA,GPIO_Pin_0,(BitAction)0);
// Delay_ms(500);
// GPIO_WriteBit(GPIOA,GPIO_Pin_0,(BitAction)1);
// Delay_ms(500);
//=====three:GPIO_ResetBits GPIO_SetBits=====//
GPIO_ResetBits(GPIOA,GPIO_Pin_0);
Delay_ms(500);
GPIO_SetBits(GPIOA,GPIO_Pin_0);
Delay_ms(500);
}
}
6.2 LED流水灯
#include "stm32f10x.h" // Device header
#include "Delay.h"
int main(void)
{
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA,ENABLE);
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0 | GPIO_Pin_1 | GPIO_Pin_2 | GPIO_Pin_3 | GPIO_Pin_4 | GPIO_Pin_5 | GPIO_Pin_6 | GPIO_Pin_7;
//GPIO_InitStructure.GPIO_Pin = GPIO_Pin_All;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA,&GPIO_InitStructure);
while (1)
{
GPIO_Write(GPIOA,~0x0001);//0000 0000 0000 0001,PA15-PA0,低电平驱动所以取反
Delay_ms(100);
GPIO_Write(GPIOA,~0x0002);//0000 0000 0000 0010
Delay_ms(100);
GPIO_Write(GPIOA,~0x0004);//0000 0000 0000 0100
Delay_ms(100);
GPIO_Write(GPIOA,~0x0008);//0000 0000 0000 1000
Delay_ms(100);
GPIO_Write(GPIOA,~0x0010);//0000 0000 0001 0000
Delay_ms(100);
GPIO_Write(GPIOA,~0x0020);//0000 0000 0010 0000
Delay_ms(100);
GPIO_Write(GPIOA,~0x0040);//0000 0000 0100 0000
Delay_ms(100);
GPIO_Write(GPIOA,~0x0080);//0000 0000 1000 0000
Delay_ms(100);
}
}
6.3 蜂鸣器
#include "stm32f10x.h" // Device header
#include "Delay.h"
int main(void)
{
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB,ENABLE);
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_12;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOB,&GPIO_InitStructure);
while (1)
{
GPIO_ResetBits(GPIOB,GPIO_Pin_12);
Delay_ms(500);
GPIO_SetBits(GPIOB,GPIO_Pin_12);
Delay_ms(500);
}
}
七、实验(GPIO输入)
7.1 按键控制LED
main.c
#include "stm32f10x.h" // Device header #include "Delay.h" #include "LED.h" #include "key.h" uint8_t KeyNum; int main(void) { LED_Init();//LED初始化 Key_Init();//按键初始化 while (1) { KeyNum = Key_GetNum();//判断是哪一个按键按下 if(KeyNum == 1) { LED1_Turn(); } if(KeyNum == 2) { LED2_Turn(); } } }LED.c
#include "stm32f10x.h" // Device header void LED_Init(void) { RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA,ENABLE); GPIO_InitTypeDef GPIO_InitStructure; GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP; GPIO_InitStructure.GPIO_Pin = GPIO_Pin_1 | GPIO_Pin_2; GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; GPIO_Init(GPIOA,&GPIO_InitStructure); GPIO_SetBits(GPIOA,GPIO_Pin_1 | GPIO_Pin_2);//初始化高电平 } //=====LED1=====// void LED1_ON(void) { GPIO_ResetBits(GPIOA,GPIO_Pin_1); } void LED1_OFF(void) { GPIO_SetBits(GPIOA,GPIO_Pin_1); } void LED1_Turn(void) { if(GPIO_ReadOutputDataBit(GPIOA,GPIO_Pin_1) == 0) //读取LED输出的高低电平,控制翻转 { GPIO_SetBits(GPIOA,GPIO_Pin_1); } else { GPIO_ResetBits(GPIOA,GPIO_Pin_1); } } //=====LED2=====// void LED2_ON(void) { GPIO_ResetBits(GPIOA,GPIO_Pin_2); } void LED2_OFF(void) { GPIO_SetBits(GPIOA,GPIO_Pin_2); } void LED2_Turn(void) { if(GPIO_ReadOutputDataBit(GPIOA,GPIO_Pin_2) == 0) { GPIO_SetBits(GPIOA,GPIO_Pin_2); } else { GPIO_ResetBits(GPIOA,GPIO_Pin_2); } }key.c
#include "stm32f10x.h" // Device header #include "Delay.h" //===按键初始化===// void Key_Init(void) { RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB,ENABLE); GPIO_InitTypeDef GPIO_InitStructure; GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU;//上拉输入 GPIO_InitStructure.GPIO_Pin = GPIO_Pin_14 | GPIO_Pin_11; GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; GPIO_Init(GPIOB,&GPIO_InitStructure); } //===获取按键返回码===// uint8_t Key_GetNum(void) { uint8_t KeyNum = 0; if(GPIO_ReadInputDataBit(GPIOB,GPIO_Pin_14) == 0) { Delay_ms(20);//消抖 while(GPIO_ReadInputDataBit(GPIOB,GPIO_Pin_14) == 0);//如果不松手则卡着 Delay_ms(20); KeyNum = 1; } if(GPIO_ReadInputDataBit(GPIOB,GPIO_Pin_11) == 0) { Delay_ms(20);//消抖 while(GPIO_ReadInputDataBit(GPIOB,GPIO_Pin_11) == 0); Delay_ms(20); KeyNum = 2; } return KeyNum; }
7.2 光敏传感器控制蜂鸣器
main.c
#include "stm32f10x.h" // Device header #include "Delay.h" #include "Buzzer.h" #include "LightSensor.h" int main(void) { Buzzer_Init();//蜂鸣器初始化 LightSensor_Init();//光敏传感器初始化 while (1) { if(LightSensor_Get() == 1){ Buzzer_ON(); } else{ Buzzer_OFF(); } } }Buzzer.c
#include "stm32f10x.h" // Device header //===蜂鸣器初始化===// void Buzzer_Init(void) { RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB,ENABLE); GPIO_InitTypeDef GPIO_InitStructure; GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP; GPIO_InitStructure.GPIO_Pin = GPIO_Pin_12; GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; GPIO_Init(GPIOB,&GPIO_InitStructure); GPIO_SetBits(GPIOB,GPIO_Pin_12);//初始化高电平 } void Buzzer_ON(void) { GPIO_ResetBits(GPIOB,GPIO_Pin_12); } void Buzzer_OFF(void) { GPIO_SetBits(GPIOB,GPIO_Pin_12); } void Buzzer_Turn(void) { if(GPIO_ReadOutputDataBit(GPIOB,GPIO_Pin_12) == 0) //读取蜂鸣器输出的高低电平,控制翻转 { GPIO_SetBits(GPIOB,GPIO_Pin_12); } else { GPIO_ResetBits(GPIOB,GPIO_Pin_12); } }LightSensor.c
#include "stm32f10x.h" // Device header //===光敏传感器初始化===// void LightSensor_Init(void) { RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB,ENABLE); GPIO_InitTypeDef GPIO_InitStructure; GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU;//上拉输入 GPIO_InitStructure.GPIO_Pin = GPIO_Pin_13; GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; GPIO_Init(GPIOB,&GPIO_InitStructure); } //===获取返回码===// uint8_t LightSensor_Get(void) { return GPIO_ReadInputDataBit(GPIOB,GPIO_Pin_13); }
八、总结
GPIO使用方法:
①初始化时钟
②定义结构体,赋值结构体
③使用GPIO_Init()函数初始化GPIO