自动驾驶相关知识汇总
文章目录
- 一、自动驾驶相关简称及解释
-
- 1.自动驾驶
- 2.硬件传感器相关
- 3.软件相关
- 4.安全相关:
- 5.辅助驾驶相关
- 二、算法相关
- 三、汽车行业术语
-
- 1. 相关名词
-
- 3.1 车企定点
- 3.2 POC
- 3.3 量产
- 2. 车型类用语
-
- 2.1 MPV
- 2.2 SUV
- 2.3 RV
- 2.4 皮卡
- 3. 汽车种类用语
-
- 3.1 CKD汽车
- 3.2 SKD汽车
- 3.3 零公里汽车
- 3.4 概念车
- 3.5 老爷车
- 3.6 零排放汽车
- 3.7 电动汽车
- 3.8 混合动力汽车
- 3.9 燃气汽车
- 4. 政策类用语
-
- 4.1 欧洲Ⅱ号排放标准
- 4.2 汽车召回
- 4.3 V6发动机
- 四、智能驾驶企业
-
- 1. 重卡业务
- 2. 商用车和Robtaxi业务
- 3. 造车新势力
- 4. 智能清洁车
- 五、行业发展
-
- 1. 自动泊车发展阶段
-
- 1.1 被动式
- 1.2 半自动泊车辅助阶段
- 1.3 全自动泊车阶段
- 2. 自动泊车功能演变
- 六、车载硬件
-
- 1. 域控制器芯片
-
- 1.1 英伟达
- 1.2 地平线
- 2. 相机
-
- 2.1 相机类型介绍
-
- 2.1.1 前视
- 2.1.2 环视
- 2.1.3 后视
- 2.1.4 侧视
- 2.1.5 内置
- 2.2 车载相机厂家
- 2.3 车载相机参数
- 七、芯片
-
- 1. XPU介绍
-
- 1.1 CPU
- 1.2GPU
- 1.3 TPU
- 1.4 DPU
- 1.5 NPU
- 1.6 BPU
- 2. 常见硬件算力
- 3. 常见参数指标
-
- 3.1 FPS
- 3.2 算力转换
- 3.3 AI 效能
- 4. 算法模型算力计算
一、自动驾驶相关简称及解释
1.自动驾驶
- ADS Autonomous Driving System 自动驾驶系统
- ADAS Advanced Driving Assist System 高级驾驶辅助系统
- ASIL Automotive Safety Integrity Level 汽车安全完整性等级 是对整个系统做危害分析和风险评估后得出,一般在产品概念设计阶段进行。系统的安全风险和汽车安全完整性等级正相关。
- CAN Controller Area Network 控制器区域网络
- DDT Dynamic Driving Task 动态驾驶任务
- HARA Hazard analysis and risk assessment 危害分析和风险评估
- H-INP Highway-IDRIVER Navigation Pilot 高速领航系统
- LIN Local Interconnect Network 局域互联网
- ODD Operational Design Domain 运行设计域 指自动驾驶系统功能设定的运行条件,包括但不限于环境、地理和时段限制、交通流量及道路特征等。只有当全部条件都满足的时候该自动驾驶才能保证正常运作。
- VRU Vulnerable Roader User 交通弱势群体
- F-APA Fusion Automatic Parking Assistance 融合式自动泊车辅助
- F-APA Full-Automatic Parking Assist 全自动泊车
- APA Automatic Parking Assistance
- L-APA Learning Automatic Parking Assistance
- HPP Home-zone Parking pilot 家庭记忆泊车
- VPA Valet Parking Assistance 代客泊车辅助
- RPA Remote Parking Assistance 远程泊车辅助
- TAA Tracking Astern Assistance 跟踪倒车辅助
- AVP Automated Valet Parking 自动代客泊车
- TBA Tracking Backup Assistance 循迹倒车
- PAR Parking Assist Rear 后部驻车辅助系统
- AOT Auto Over Take 主动超车
2.硬件传感器相关
-
USS Ultra-Sonic Sensor 超声波传感器
-
LiDAR Light Detection and Ranging 机载激光雷达
-
BT Bluetooth 蓝牙
-
MMWR Millimeter Wave Radar 毫米波雷达
-
Monocular Camera 单目摄像头
-
Binocular Camera 双目摄像头
-
IMU Inertial Measurement Unit 惯性测量单元
-
AVM Around View Monitoring 全景式监控影像系统
-
HDMap High-Definition Map 高清地图
-
SD Map Standard-Definition Map 车机地图
-
ECU Electronic Control Units 电子控制单元
-
MCU Micro-programmed Control
-
Unit 微控制单元 又称单片微型计算机或者单片机
-
HMI Human Machine Interface 人机界面
-
SOC System On Chip 系统级芯片 也有称片上系统,意指它是一个产品,是一个有专用目标的集成电路,其中包含完整系统并有嵌入软件的全部内容。
3.软件相关
-
BSW Base software 基础软件
-
MCAL Micro controller Abstraction Layer 微控制器抽象层
MCAL指微控制器抽象层,是实现不同硬件接口统一化的特殊层。通过微控制器抽象层可将硬件封装起来, 避免上层软件直接对微控制器的寄存器进行操作。微控制器抽象层包括微控制器驱动(Microcontroller Drivers)、存储器驱动(MemoryDrivers)、通信驱动(Communication Drivers)以及I/O驱动(I/O Drivers)。
简单来说,MCAL就是主控芯片(单片机)的外设驱动。 -
Static Code 静态代码 指各模块功能的具体实现代码
-
Dynamic Code动态代码 指由配置工具根据相关配置信息生成的代码,也称为配置代码。
RTE Run-time environment 运行环境 又称“运行期系统”,run-time system),指一种把半编译的运行码在目标机器上运行的环境。
4.安全相关:
- ABS Anti-lock Braking System 防抱死制动系统
- AEB-VRU AEB-Vulnerable Road User 行人自动紧急制动系统
- PCW Pedestrian Collision Warning 行人安全辅助
- AESC Auto Emergency Steering Control 自动紧急转向控制
- AEBS Auto Emergency Brake System 自动紧急制动系统
5.辅助驾驶相关
- ACC Adaptive Cruise Control 自适应巡航
- ALC Auto Lane Change 自动变道辅助
- BSD Blind Spot Detection 盲点监测
- DMS Driver Monitor System 驾驶员状态监测系统
- OMS Occupant Monitoring System 车载驾舱监控系统
- HUD Head Up Display 抬头显示系统
- HWA High Way Assist 高速路辅助
- ICA Intelligent Cruise Assist 智能巡航辅助
- LCA Lane Change Assist 变道辅助
- LCC Lane Centering Control System 车道居中控制
- LDP Lane Departure Prevention 车道偏离抑制
- LKA Lane Keep Assist 车道保持辅助
- SAS Speed Assist System 速度辅助系统
- SLA Speed Limit Assist 限速辅助
- TJA Traffic Jam Assist 交通拥堵辅助
- TJP Traffic Jam Pilot 交通拥堵代驾
- TLR Traffic Light Recognition 交通信号灯识别
- TSR Traffic Signal Recognition 交通标志识别
- MLD Multilane Detection System 多车道检测系统
- ALCA Advanced Lane Change Assistant System 提前换道辅助系统
二、算法相关
三、汽车行业术语
1. 相关名词
3.1 车企定点
车企定点指被汽车厂商指定为零部件的批量配套供应商,确认定点后根据双方确认的时间节点完成各项确定的目标后再进入批量生产、供货,根据汽车厂商的不同,从定点到正式批量需要的时间也不尽相同:A:车企定点指被汽车厂商指定为零部件的批量配套供应商,确认定点后根据双方确认的时间节点完成各项确定的目标后再进入批量生产、供货,根据汽车厂商的不同,从定点到正式批量需要的时间也不尽相同。
3.2 POC

3.3 量产
量产,即批量生产,是指某种物品在经过一系列的测试后,通过必要的规格审定,同时大批量生产该物品,以备社会不同人士需求所使用。
量产车是指面向市场批量生产的汽车。国际上有个标准,量产车必须达到50辆才可以称之为量产,并且量产车是针对非量产车而言的。非量产车指的是并不对外发售,由客户定制或者特殊需求的车,比如:概念车等。
2. 车型类用语
2.1 MPV
MPV的全称是Multi-Purpose Vehicle,即多用途汽车。它集轿车、旅行车和厢式货车的功能于一身,车内每个座椅都可调整,并有多种组合的方式,例如可将中排座椅靠背翻下即可变为桌台,前排座椅可作180度旋转等。
近年来,MPV趋向于小型化,并出现了所谓的S-MPV,S是小(Small)的意思。S-MPV车长一般在(4.2-4.3)m之间,车身紧凑,一般为(5—7)座。
2.2 SUV
SUV的全称是SportUtility Vehicle,中文意思是运动型多用途汽车。现在主要是指那些设计前卫、造型新颖的四轮驱动越野车。SUV一般前悬架是轿车型的独立悬架,后悬架是非独立悬架,离地间隙较大,在一定程度上既有轿车的舒适性又有越野车的越野性能。由于带有MPV式的座椅多组合功能,使车辆既可载人又可载货,适用范围广。
2.3 RV
RV的全称是Recreati&a Vehicle,.即休闲车,是一种适用于娱乐、休闲、旅行的汽车,首先提出RV汽车概念的国家是日本。RV的覆盖范围比较广泛,没有严格的范畴。从广义上讲,除了轿车和跑车外的轻型乘用车,都可归属于RV。MPV及SUV也同属RV。
2.4 皮卡
皮卡(PICK-UP)又名轿卡。顾名思义,亦轿亦卡,是一种采用轿车车头和驾驶室,同时带有敞开式货车车厢的车型。其特点是既有轿车般的舒适性,又不失动力强劲,而且比轿车的载货和适应不良路面的能力还强。最常见的皮卡车型是双排座皮卡,这种车型是目前保有量最大,也是人们在市场上见得最多的皮卡。
3. 汽车种类用语
3.1 CKD汽车
CKD是英文Completely Knocked Down的缩写,意思是“完全拆散”。换句话说,CKD汽车就是进口或引进汽车时,汽车以完全拆散的状态进入,之后再把汽车的全部零、部件组装成整车。我国在引进国外汽车先进技术时,一开始往往采取CKD组装方式,将国外先进车型的所有零部件买进来,在同内汽车厂组装成整车。
3.2 SKD汽车
SKD是英文Semi-Knocked Down的缩写,意思是“半散装”。换句话说,SKD汽车就是指从国外进口汽车总成(如发动机、驾驶室、底盘等),然后在国内汽车厂装配而成的汽车。 SKD相当于人家将汽车做成“半成品”,进口后简单组装就成整车。
3.3 零公里汽车
零公里汽车是一个销售术语,指行驶里程为零(或里程较低,如不高于10kin)的汽车,它的出现是为了满足客户对所购车辆“绝对全新”的要求。零公里表示汽车从生产线上下来后,还未有任何入驾驶过。为了保证里程表的读数为零,从生产厂到各销售点,均采用大型专用汽车运输,以保证车辆全新。
3.4 概念车
概念车由英文Conception Car意译而来。概念车不是Ep将投产的车型,它仅仅是向人们展示设计人员新颖、独特、超前的构思而已。概念车还处在创意、试验阶段,很可能永远不投产。因为不是大批量生产的商品车,每一辆概念车都可以更多地摆脱生产制造水平方面的束缚,尽情地甚至夸张地层示自己的独特魅力。
概念车是时代的最新汽车科技成果,代表着未来汽车的发展方向,因此它展示的作用和意义很大,能够给人以启发并促进相互借鉴学习。因为概念车有超前的构思,体现了独特的创意,并应用了最新科技成果,所以它的鉴赏价值极高。
世界各大汽车公司都不惜巨资研制概念车,并在国际汽车展上亮相,一方面了解稍费者对概念车的反映,从而继续改进;另一方面也是为了向公众显示本公司的技术进步,从而提高自身形象。
3.5 老爷车
老爷车也叫古典车,一般指20年前或更老的汽车。老爷车是一种怀旧的产物,是人们过去曾经使用的,现在仍可以工作的汽车。
老爷车这一概念始于20世纪70年代,最早出现在英国的一本杂志上,这种说法很快得到老爷车爱好者的认同。不到10年功夫,关注老爷车的人就越来越多,致使老爷车的身价戏剧性地增长起采。例如,一辆1933年款式的美国求盛伯格汽车在拍卖行卖到100万美元,一辆布加迪老爷车卖到650万美元。
3.6 零排放汽车
零排放汽车是指不排出任何有害污染物的汽车,比如太阳能汽车、纯电动汽车、氢气汽车等。有时人们也把零排放汽车称为绿色汽车、环保汽车、生态汽车、清洁汽车等。
3.7 电动汽车
目前人们所说的电动汽车多是指纯电动汽车,即是一种采用单一蓄电池作为储能动力源的汽车。它利用蓄电池作为储能动力源,通过电池向电机提供电能,驱动电动机运转,从而推动汽车前进。从外形上看,电动汽车与日常见到的汽车并没有什么区别,区别主要在于动力源及其驱动系统。
3.8 混合动力汽车
混合动力汽车就是在纯电动汽车上加装一套内燃机,其目的是减少汽车的污染,提高纯电动汽车的行驶里程。混合动力汽车有串联式和并联式两种结构形式。
3.9 燃气汽车
燃气汽车主要有压缩天然气汽车(.简称LPG汽车或LPGV)和压缩天然气汽车(简称CNG汽车或CNGV)。顾名思义,LPG汽车是以液化石油气为燃料,CNG汽车是以压缩天然气为燃料。燃气汽车的CO排放量比汽油车减少90%以上,碳氢化合物排放减少70%以上,氮氧化合物排放减少35%以上,是目前较为实用的低排放汽车。
4. 政策类用语
4.1 欧洲Ⅱ号排放标准
汽车尾气排出的污染物主要有碳氢化合物(HC)、氮氧合物(NOx)、一氧化碳(CO)、微粒(PM)等,它们主要通过汽车排气管排放。由于汽车排放污染物对环境造成的危害日益严重,世界各国和地区都先后制定了限制汽车废气排放的限量值,其中欧盟制定的欧洲标准是一项大多数国家和地区执行的参照标准。
欧洲排放标准属于一个非常专业的技术范畴,现通过举例来解释欧洲工号、欧洲Ⅱ号标准到底是什么意思。
以设计乘员数不超过6人(包括司机),且最大总质量不超过2.5t的轿车为例。
我国于1999年1月1日到2003年12月31日这个阶段必须达到的排放标准限值为:一氧化碳不得超过3.16g/km;碳氢化合物不得超过1.13g/km;其中柴油车的颗粒物标准不得超过0.18g/km;耐久性要求为5万km。
2004年1月1日以后,标准又有所提高:汽油车一氧化碳不超过2.2g/km,碳氢化合物不超过0.5g/km;柴油车一氧化碳不超过1.0g/km,碳氢化合物不超过0.7g/km,颗粒物不超过0.08g/km。这便是2004年我国将要实行的欧洲Ⅱ排放标准。
4.2 汽车召回
所谓汽车召回(RECALL),就是投放市场的汽车,发现由于设计或制造方面的原因存在缺陷,不符合有关的法规、标准,有可能导致安全及环保问题,厂家必须及时向国家有关部门报告该产品存在问题、造成问题的原因、改善措施等,提出召回申请,经批准后对在用车辆进行改造,以消除事故隐患。目前实行汽车召回制度的国家有美国、日本、加拿大、英国、澳大利亚等。
4.3 V6发动机
汽车发动机常用缸数有3、4、5、6、8、10、l2缸。排量1L以下的发动机常用3缸;(1-2.5)L一般为4缸发动机;3L左右的发动机一般为6缸;4L左右为8缸;5.5L以上用12缸发动机。二般来说,在同等缸径下,缸数越多,排量越大,功率越高;在同等排量下,缸数越多,缸径越小,转速可以提高,从而获得较大的提升功率。
气缸的排列形式主要有直列、V形、W形等。
一般5缸以下发动机的气缸多采用直列方式排列,少数6缸发动机也有直列方式的,过去也有过直列8缸发动机。直列发动机的气缸体成一字排开,缸体、缸盖和曲轴结构简单,制造成本低,低速扭矩特性好,燃料消耗少,应用比较广泛,缺点是功率较低。一般1L以下的汽油机多采用3缸直列,(1-2.5)L汽油机多采用直列4缸,有的四轮驱动汽车采用直列6缸,因为其宽度小,可以在旁边布置增压器等设施。直列6缸的动平衡较好,振动相对较小,所以也为一些中、高极轿车采用。 (6-12)缸发动机一般采用V形排列,其中VIO发动机主要装在赛车上。V形发动机长度和高度尺寸小,布置起来非常方便,而且一般认为,V形发动机是比较高级的发动机,也成为轿车级别的标志之一。V8发动机结构非常复杂,制造成本很高,所以使用得较少。V12,发动机过大过重,只有极个别的高级轿车采用。
目前最常见的发动机主要是直列4缸(14)与V型6缸(V6)发动机。一般来说,V6发动机的排量较14的为高,V6机比14—运行平稳、安静。U主要装在普通级轿车上,而V6机则装在中高档轿车上。
四、智能驾驶企业
目前从事相关智能驾驶工作的企业主要有以下几大业务:重卡业务、商用车和Robotaxi业务、环卫智能车业务及造车新势力等。下面整理了最新的自动驾驶与计算机视觉AI公司:
1. 重卡业务
1、图森未来
国内base北京,纳斯达克上市,自动驾驶重卡技术领跑者,中美两地都有研发中心!图森自主研发的高清摄像头感知系统,融合激光雷达和毫米波雷达等其他传感器,能够360°感知周围车辆。多传感器全覆盖使得无人驾驶系统在几乎任何条件下都可以平稳运行,不分昼夜、无惧风雨,校招社招门槛较高!
2、赢彻科技
计算机视觉顶尖科学家杨睿刚博士带队,上海、硅谷两个研发中心,业务聚焦干线物流场景,自主研发L3和L4级自动驾驶技术(轩辕系统)
3、智加科技
上海+苏州+北京研发中心,主打毫米波雷达+激光雷达+摄像头多传感器融合方案,360度无死角感知车辆周边情况,数百米外亦能追踪其它车辆的存在,招社招门槛高!
4、西井科技
比较低调,base上海!西井科技成立于2016年,从研发类脑芯片起步,专注于芯片的研发。在2016年初进行转型,通过将技术和产品相结合的方式服务于智慧港口,布局无人驾驶团队,涵盖无人驾驶跨运车、无人驾驶新能源集卡和无人驾驶电动重卡三大项目。2018年发布全时无人驾驶电动重卡Q-Truck及电动重卡Well-Truck,电动重卡Well-Truck已经在盐田国际码头进行路测。
5、飞步科技
主营智慧港口业务,车路云一体化,base杭州!毕马威中国“领先汽车科技企业50强”,在宁波舟山港和南通港,已经建立首支港口自动驾驶集卡作业车队,开始参与实船自动化作业
6、主线科技
首席科学家李德毅院士,智能物流生态领航者,重构中国货运网络,面向港口物流枢纽与高速干线物流场景。合作伙伴包括中国重汽、中国一汽、陕汽重卡等!
7、挚途科技
base苏州(上海也有研发中心),一汽解放发起的自动驾驶公司,是AI技术赋能汽车业的先行者和商用车自动驾驶商业化落地的领跑者!
8、斯年智驾
北京、上海两个研发中心,物流重卡无人驾驶技术研究和商业化!清北、普渡大学的团队。
9、无人矿车方向
国内主要有易控智驾、踏歌智行、慧拓智能等,专注矿业相关业务!切入点也是非常准确。
2. 商用车和Robtaxi业务
1、集度汽车
基地上海+北京,吉利和百度合资,据说吉利已经撤资,百度技术落地!
2、Autox
MIT肖健雄博士创办,国内base深圳、北京、上海广州,国外硅谷!Autox是国内Robotaxi的领跑者是中国目前唯一一家实现城市公开道路真正完全无人驾驶RoboTaxi商业化运营的公司,具有国内数目最多的RoboTaxi车队
3、动量
基地北京、苏州、斯图加特,微软亚洲研究院的团队,国内技术领先,不过内部略微卷!!!
4、滴滴
网约车、出租车、卡车等业务,达芬奇实验室,公司就不做介绍了。
5、小米
雷总押下了自己所有的荣誉与激情,再来创业,500人团队,力争25年小米自动驾驶全技术栈达到一流水平。
6、华为
华为BU,近年来华为投入了相当大的人力物力财力支持自动驾驶业务,内部很多小伙伴也转岗到相关方向,还是比较看好华为的实力!
7、中智行
base上海、北京、苏州、南京,基于车路协同的新一代自动驾驶引领者,致力于用科技让交通更安全更高效、更经济、更舒适。
8、纵目科技
基地上海、北京、深圳、重庆、斯图加特,比较务实的一家公司,已经研发了L4自主代客泊车系统(AVP)、自动泊车系统(APA)、360度环视高级驾驶辅助系统(ADAS)、ZATLAS全栈高精地图等系列智能出行全生态产品。
9、魔视智能
base上海,魔视智能拥有自主知识产权的全栈式自动驾驶核心技术,包括环境感知、多传感器融合、高精度的车辆定位、路径规划、车辆控制、驾驶决策等所有核心算法,支持L1-L4级自动驾驶。魔视智能独有的深度学习框架,全面支持国际及国内六大主流嵌入式芯片平台,实现高度优化及精准的人工智能引
擎
10、驭势科技
base北京、上海,intel中国研究院院长创办,驭势科技依托自主研发的U-Drive@智能驾驶平台,在业务上已经形成可规模化部署的L3-L4级智能驾驶系统,可以满足多场景、高级别的自动驾驶需求。2019年驭势科技率先在机场和厂区领域实现了“去安全员”无人驾驶常态化运营的重大突破,落地“全场景、真无人、全天候”的自动驾驶技术,并由此迈向大规模商用。
11、文远知行
基地广州,北上深、武汉均有研发,文远知行的自动驾驶技术和商业化进程在全球居于领先地位,已进入自动驾驶商业化运营阶段,形成自动驾驶出租车(Robotaxi)、自动驾驶小巴(MiniRobobus)、自动驾驶货运车(Robovan)、自动驾驶环卫车(Robo Street Sweeper) 、高阶智能驾驶(Advanced Driving Solution)等五大产品矩阵,提供网约车、随需公交、同城货运、智能环卫、高阶智能驾驶解决方案等多种服务。
12、小马智行
彭军和楼天城作为联合创始人,2016年底在美国硅谷成立,中美两国同时布局,落地自动驾驶技术。在中国和加州分别推出了当地首个面向公众的自动驾驶打车服务,即Robotaxi服务。
13、智能网联
主要包括蘑菇车联、斑马汽车等,主打互联网+智能驾驶!
14、轻舟智航
核心团队成员分别来自Waymo(谷歌旗下无人驾驶公司)、特斯拉、英伟达、Facebook等,在国内多个城市部署了龙舟系列自动驾驶车,覆盖多类车型,应用于城市公交、网约出行等场景,助推城市交通走向智能化、网联化、共享化。
15、元戎启行
base深圳,元戎启行是国内唯一获得互联网头部企业战略投资的L4级自动驾驶公司,专注干研发和应用L4级自动驾驶技术,聚焦于出行和同城货运两类业务,拥有"元启行”(Robotaxi自动驾驶乘用车)和"元启运”(Robotruck自动驾驶轻卡)两大产品线_
16、禾多科技
百度研究院背景,成立于2017年6月,基于前沿人工智能技术和汽车工业技术,打造由本地数据驱动的自动驾驶量产解决方案。作为量产领先的自动驾驶公司,禾多科技具备从人工智能算法到嵌入式系统,从大数据闭环到系统迭代进化的完整布局,以行车和泊车两大场景为量产切入点,最终实现全场景的无人驾驶解决方案部署。
17、纽劢科技
特斯拉背景,国内极少数还在死磕纯视觉L2~L4解决方案的自动驾驶公司!
18、毫末智行
长城系,主要关注乘用车辅助驾驶、低速无人车生态等,近两年业务能力突出!
19、追势科技
追势科技2019年成立于上海,致力于自动驾驶系统的研发,向车厂和上下游提供全栈自动驾驶解决方案并逐渐拓展至其他落地场景。主要面向业务包括低速场景的小巴和泊车业务。
20、其它
环宇智行、深兰科技、景驰科技、经纬恒润、欧菲智能也都有相关的产品和布局,和吉利相关的两个子公司:亿咖通、吉咖智能,也表现不错!
3. 造车新势力
1、三巨头-蔚来、小鹏、理想
蔚来、小鹏、理想!行业三巨头,电车+辅助/自动驾驶,绝对是标配,国内外销量一直在增加,三家企业
也非常关注自动驾驶方案。
2、威马汽车
2015年沈辉创办威马汽车(带领团队完成吉利收购沃尔沃),威马汽车自创立之初便制定了明确的集团发展"三步走"战略(第一步,做智能电动汽车的普及者;第二步,成为数据驱动的智能硬件公司;第三步,成长为智慧出行新生态的服务商),未来发展可期!
3、奇点汽车
成立于2014年12月,公司业务范围涵盖了新能源汽车、智能汽车系统、基于大数据与云计算的车联网服
务和解决方案、创新技术产品的投资等。
4、零跑汽车
大华系的汽车公司,零跑科技是一家具备全域自研自造能力的科技型智能电动汽车企业,业务范围涵盖智台电动汽车效车设计:研发制造 知能驾中电机电能电动汽车整牛设计、财友制造、首能驾敏、电机生控、电池系统开发以及基于云计算的车联网解决方案。
5、智己汽车
上汽集团、张江高科和阿里巴巴集团共同打造的全新用户型汽车品牌,成立于2020年12月25日,全力探索实现"软件定义汽车"模式,
4. 智能清洁车
1、仙途智能
base上海,杭州,滴滴研究院背景,Autowise.ai成立于2017年8月,在上海组建了中国最早的一批robotaxi车队,并于2019年获得自动驾驶卡车测试牌照。仙途智能率先将自动驾驶技术应用到城市环卫领域,发布全球首支涵盖1-18吨不同车型、并能应用于复杂作业场景的自动驾驶清扫车队,并成为自动驾驶商业化领先企业。目前,公司在全球范围内拥有150余辆自动驾驶清扫车,车辆已在瑞士、德国、美国及中国上海、北京、广州、郑州、南京、合肥、唐山等全球20多座城市实现多场景商业落地,累计真实运营里程超百万公里。
2、高仙机器人
成立于2013年,base上海苏州,是全球最早从事自主移动技术研发和应用的高科技公司之一。高仙深耕
商用清洁机器人赛道,推出7大产品线,覆盖7大清洁功能,全面实现行业领跑。高仙是清洁行业唯一获全ISO9001国际认证、中国机器人CR认证、美国UL安全认证、欧洲CE安全认证的商业服务机器人公司。
3、智行者
base北京,成立于2015年,聚焦无人驾驶汽车大脑的研发,致力于成为通用场景L4解决方案提供商。公司已有员工近 500人,核心团队均来自清华大学汽车系,技术优势显著。获得厚安(厚朴/Arm)、百
京东等多家知名机构的投资。智行者目主研发的无人驾驶大脑已成功赋能智能出行、智慧生活、特种应用等多个领域,逐步实现用无人驾驶大脑构建智慧生活的企业愿景,累计落地场景超过2800个点位,商业应用里程已超过500万公里,已实现无人驾驶车辆的批量化落地,商业化能力位于国内无人驾驶企业前列。
4、酷哇机器人
酷哇在上海(徐汇、嘉定)、芜湖、长沙、西安均设有研发中心,拥有多个规模化的超算中心,研发团队近500人。专注干城市复杂场景下自动驾驶技术的研发和智能网联城市服务的应用,酷哇拥有整车装备制造、软件算法研发和智能网联服务三重优势,是国内L4级自动驾驶商用车领域头部企业。合作方包括奇瑞、北汽、陕汽、中联等主机厂,聚焦市政环卫、城配物流和城市出行三大领域,布局L4级自动驾驶产品和服务,已成功实现规模化商业落地。
5、物流智能车
主要有美团、京东、阿里(小蛮驴)以及新石器等,切入快递配送、自动售货小车等方向,
五、行业发展
1. 自动泊车发展阶段
自动泊车的发展可以分为被动式、半自主式泊车辅助以及全自动泊车三个阶段,目前已经发展至第三阶段,其已经体现出在车载传感器方面的应用价值。
1.1 被动式
被动式主要利用超声波+蜂鸣器+HMI图标来提示驾驶者外部障碍物情况,防止车辆在倒车时碰撞,一般由以下几个功能构成:防碰撞声音+图像提示、测量停车位大小的系统、提供转弯角度的提示、提供后视图像和辅助线检测、360度环视图像。
典型的代表技术:超声波传感器、AVM(Around View Monitoring/360°环视摄像头)
1.2 半自动泊车辅助阶段
随着自动化水平的提高,各个汽车公司都想要帮助驾驶者更好地停车,所以开发出不同的系统如Toyota Intelligent,这些系统的特点是一般需要驾驶员来负责油门和刹车,车辆帮忙计算轨迹路径,帮助驾驶员入库。
典型的代表技术:半自动泊车ECU控制器、APA(Automatic Parking Assist/自动泊车辅助)
1.3 全自动泊车阶段
从半自动泊车到全自动泊车的进化过程中最重要的演变就是人不需要在车内,仅通过手机可以指挥车进行泊车。
典型的代表技术:HPP(Home Zone Parking/家庭记忆泊车)、AVP(Autonomous Valet Parking/自主代客泊车)
辅助泊车系统目前已发展至第三代初期,从最开始的驾驶员必须在车内配合挂挡完成泊车,发展到驾驶员可以站在车外5米使用手机控制泊车,最后到汽车自己学习泊车路线,完成固定停车位或自家车库的泊车,从而在自主泊车这一子场景中实现L3级别的自动驾驶。
自动泊车系统需要调用车载的各类摄像头、雷达等传感器资源,形成对自动驾驶系统的资源复用。自动泊车作为自动驾驶的一个子场景,相对落地难度小。自动泊车分为“被动-半自动-全自动”,目前绝大多数的L2量产车型都选择标配辅助泊车功能。因此,自动泊车系统能够真正体现自动驾驶中各类传感器的应用价值,有望成为最快落地的L3子场景。
2. 自动泊车功能演变
自动泊车功能发展分为四步,分别是APA、RPA、自学习泊车以及AVP代客泊车,现已发展至自学习泊车的阶段,未来将向AVP代客泊车迈进。

• 自动泊车系统目前已发展至自学习泊车功能的阶段,从最开始的驾驶员必须在车内配合挂挡完成泊车(APA泊车),发展到驾驶员可以站在车外5米外使用手机遥控泊车(RPA远程遥控泊车),最后到汽车自主学习泊车路线完成固定车位泊车(自学习泊车),未来将向AVP代客泊车迈进。
• 目前发展至自学习泊车的特点主要包括以下三方面:
• 1.传感器布局为8个UPA+4个APA+车载蓝牙+4个鱼眼摄像头;
• 2.典型应用场景为驾驶员位于车外50内财用遥控器,车位是固定的;
• 3.SAE等级为L3。
• 未来,随着自动驾驶的升级,自动泊车功能将向AVP代客泊车迈进。与现处于自学习泊车阶段相比,AVP的传感器配置方案上,UPA、APA、车载蓝牙和鱼眼摄像头是一样的,区别在于新增加了一个前视摄像头:在典型应用场景上,区别在于,驾驶员可以位于车外500内,范围上扩大了十倍,车位可以在地上或地下停车场:在SAE等级上。AVP提升了一级,其等级为L4。
六、车载硬件
1. 域控制器芯片
1.1 英伟达
• Xavier 参考
NVIDIA Jetson AGX Xavier 刷机教程
NVIDIA Jetson AGX Xavier相关配置
1.2 地平线
• J5
• J3
2. 相机

2.1 相机类型介绍
2.1.1 前视
前视相机主要应用在防撞预警、车道偏离预警、交通标识识别、行人防撞预警等ADAS应用。
该摄像头在 L2 的ADAS 系统中作为主摄像头使用。其视场角的一般为 30°、50°、60°、100°、120°,检测距离一般为 150 - 170 m,摄像头输出的格式为 RCCB 或 RCCC。
2.1.2 环视
环视相机主要安装在车身四周,一般使用 4 - 8 个摄像头,可分为前向鱼眼摄像头/左侧鱼眼摄像头/右侧鱼眼摄像头/后向鱼眼摄像头。用于全景环视功能的显示,以及融合泊车功能的视觉感知及目标检测;常用色彩矩阵为 RGB,因为有色彩还原的需求
2.1.3 后视
后视相机主要应用于倒车影像(采用广角),视场角在 120 - 140° 之间,探测距离大概 50 m
2.1.4 侧视
侧视相机主要应用于视觉盲点监测等,安装在 B 柱或者车辆后视镜处,该摄像头的视场角一般为 90° - 100°,探测距离大概在 80 m 左右,这个摄像头的主要作用是检测侧向车辆及自行车。
2.1.5 内置
内置相机主要应用于疲劳提醒、手势识别、情绪识别等
2.2 车载相机厂家
2.3 车载相机参数
以森云这款SG8-OX08BCC-GMSL2-H120S1A为例,从森云官网我们可以看到关于该相机参数列表如下:

SG8:
OX08BCC:
GMSL2: Gigabit Multimedia Serial Links,吉比特多媒体串行链路,缩写为GMSL,是Maxim公司(现在被ADI收购了)推出的一种高速串行接口,适用于视频、音频和控制信号的传输,使用50Ω同轴电缆或100Ω屏蔽双绞线电缆,传输距离可达15m或更长。
H120S1A:H120代表水平FOV为120°
七、芯片
1. XPU介绍
1.1 CPU
Central Processing Unit 中央处理器
1.2GPU
Graphics Processing Unit 图像处理器
- 可以并行计算
- 拥有数量众多的计算单元,适合处理大量类型统一的数据
- 无法单独工作,必须由CPU进行控制调用才能工作
- 代表作有【NVIDIA GPU】 【AMD系列】
1.3 TPU
Tensor Processing Unit(张量处理器 )
- 谷歌专门为加速深层神经网络运算能力而研发的一款芯片,其实也是一款ASIC(专用集成电路)
- 提供高吞吐量的低精度计算,且能效(TOPS/w)更高
- 与同期CPU和GPU相比,15-30倍性能提升,30-80倍效率(性能/瓦特)提升
1.4 DPU
Deep learning Processing Unit 深度学习处理器
1.5 NPU
NPU Neural network Processing Unit 神经网络处理器
- 专为物联网人工智能设计,用于加速神经网络运算,解决传统芯片在神经网络运算时效率低下的问题
- 代表作有 【寒武纪芯片】,【IBM 的TrueNorth】
1.6 BPU
Brain Processing Unit(大脑处理器)
- 地平线机器人将BPU已申请商标,属于该公司AI芯片专属名字。
- BPU最大特点是高性能、低延迟、低能耗。
- AI可以分成感知、建模、决策和规划三个阶段,对应规划了名为高斯、伯努利和贝叶斯的三代BPU架构。正在开发中的征程6的架构叫纳什 地平线J3,J5
2. 常见硬件算力
硬件 类型 标注算力(INT8) 标注算力(FP16)
NVIDIA RTX 3060 GPU
NVIDIA RTX 3080 GPU 60TOPS 30TFLOPS
NVIDIA RTX 3080ti GPU 68TOPS 34TFLOPS
NVIDIA RTX 3090 GPU
NVIDIA Jetson AGX Xavier GPU 22TOPS 11TFLOPS
地平线 J3 BPU 5TOPS
地平线 J5 BPU 128TOPS
安霸 CV2 12TOPS
3. 常见参数指标
3.1 FPS
FPS(Frames Per Second),指画面每秒传输/传输的帧数。
3.2 算力转换
TOPS:每秒运算次数(默认处理INT8)。一万亿次/秒(10^12)操作。
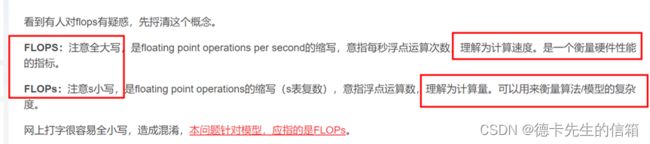
FLOPS: Floating-point operations per second
每秒浮点运算次数(默认FP16) (NVIDIA AGX Xavier 11TFLOPS(FP16) 22TOPS(INT8))
MFLOPS:每秒 一百万 (=10^6) 次的浮点运算。
GFLOPS:每秒 十亿 (=10^9) 次的浮点运算。(YOLOX_S模型: 22GFLOPS)
TFLOPS:每秒 一万亿(=10^12)次的浮点运算。(NVIDIA RTX 3080Ti 34.1TFLOPS)
PFLOPS:每秒 一千万亿(=10^15)次的浮点运算。(天河二号超算 33.86PFLOPS)
EFLOPS:每秒 一百亿亿(=10^18)次的浮点运算。
3.3 AI 效能
真实 AI 效能 = 硬件物理算力 x 计算资源的有效利用率 x AI 算法的效率。
GPU 在跑深度神经网络算法的时候,计算资源利用率不超过 50%,而地平线的征程 3 和征程 5 则将算力利用率做到了 90% 以上。

4. 算法模型算力计算

基于输入19201080图片,resize 640640
-
A模型(640*640)总参数量8.05M,运算量20GFLOPs。
-
已知在1TOPS(INT8)算力的芯片上运行1TOPs的模型,计算效率为100%时,运行的时间是1秒。
-
算力换算
INT8:FP16(FP32)=1:2【比如2TOPS(INT8)算力等效1TFLOPS(FP16/FP32)】,
FP32:FP64=1:64 -
因此,A模型推理一次(单帧)的计算量:20GFLOPs=0.02TFLOPs,
转成int8的TOPs就是0.02*2=0.04TOPs。 -
四路摄像头输出图,每推理一次的算力就是0.04*4 = 0.16TOPs.