ALSA学习(4)——Control设备的创建
参考博客: https://blog.csdn.net/DroidPhone/article/details/6409983
(下面的内容基本是原博主的内容,我只是修改了一些格式之类的)
文章目录
- 一、Control接口
- 二、Controls的定义
- 三、Control的名字
- 四、访问标志(ACCESS Flags)
- 五、回调函数
-
- 5.1 info回调函数
- 5.2 get回调函数
- 5.3 put回调函数
- 六、创建Controls
- 七、元数据(Metadata)
- 八、Control设备的建立
一、Control接口
Control接口主要让用户空间的应用程序(alsa-lib)可以访问和控制音频codec芯片中的多路开关,滑动控件等。对于Mixer(混音)来说,Control接口显得尤为重要,从ALSA 0.9.x版本开始,所有的mixer工作都是通过control接口的API来实现的。
ALSA已经为AC97定义了完整的控制接口模型,如果你的Codec芯片只支持AC97接口,你可以不用关心本节的内容。
二、Controls的定义
要自定义一个Control,我们首先要定义3各回调函数:info,get和put。然后,定义一个snd_kcontrol_new结构:
代码路径: kernel_4.14nclude\sound\control.h
truct snd_kcontrol_new {
snd_ctl_elem_iface_t iface; /* interface identifier */
unsigned int device; /* device/client number */
unsigned int subdevice; /* subdevice (substream) number */
const unsigned char *name; /* ASCII name of item */
unsigned int index; /* index of item */
unsigned int access; /* access rights */
unsigned int count; /* count of same elements */
snd_kcontrol_info_t *info;
snd_kcontrol_get_t *get;
snd_kcontrol_put_t *put;
union {
snd_kcontrol_tlv_rw_t *c;
const unsigned int *p;
} tlv;
unsigned long private_value;
};
iface :字段指出了control的类型,alsa定义了几种类型(SNDDRV_CTL_ELEM_IFACE_XXX),常用的类型是MIXER,当然也可以定义属于全局的CARD类型,也可以定义属于某类设备的类型,例如HWDEP,PCMRAWMIDI,TIMER等,这时需要在device和subdevice字段中指出卡的设备逻辑编号。
name: 字段是该control的名字,从ALSA 0.9.x开始,control的名字是变得比较重要,因为control的作用是按名字来归类的。ALSA已经预定义了一些control的名字,我们再Control Name一节详细讨论。
index:字段用于保存该control的在该卡中的编号。如果声卡中有不止一个codec,每个codec中有相同名字的control,这时我们可以通过index来区分这些controls。当index为0时,则可以忽略这种区分策略。
access: 字段包含了该control的访问类型。每一个bit代表一种访问类型,这些访问类型可以多个“或”运算组合在一起。
private_value:字段包含了一个任意的长整数类型值。该值可以通过info,get,put这几个回调函数访问。你可以自己决定如何使用该字段,例如可以把它拆分成多个位域,又或者是一个指针,指向某一个数据结构。
tlv字段为该control提供元数据
三、Control的名字
control的名字需要遵循一些标准,通常可以分成3部分来定义control的名字:源–方向–功能。
源:可以理解为该control的输入端,alsa已经预定义了一些常用的源,例如:Master,PCM,CD,Line等等。
方向:代表该control的数据流向,例如:Playback,Capture,Bypass,Bypass Capture等等,也可以不定义方向,这时表示该Control是双向的(playback和capture)。
功能:根据control的功能,可以是以下字符串:Switch,Volume,Route等等。
举例:
static const struct snd_kcontrol_new capture_source_control = {
.iface = SNDRV_CTL_ELEM_IFACE_MIXER,
// 方向
.name = "Capture Source",
static const struct snd_kcontrol_new mute_control = {
.iface = SNDRV_CTL_ELEM_IFACE_MIXER,
// 源 + 功能
.name = "Master Playback Switch",
四、访问标志(ACCESS Flags)
static const struct snd_kcontrol_new mute_control = {
.iface = SNDRV_CTL_ELEM_IFACE_MIXER,
.name = "Master Playback Switch",
// 标志
.access = SNDRV_CTL_ELEM_ACCESS_READWRITE,
Access字段是一个bitmask,它保存了改control的访问类型。默认的访问类型是:SNDDRV_CTL_ELEM_ACCESS_READWRITE,表明该control支持读和写操作。如果access字段没有定义(.access==0),此时也认为是READWRITE类型。
如果是一个只读control,access应该设置为:SNDDRV_CTL_ELEM_ACCESS_READ,这时,我们不必定义put回调函数。类似地,如果是只写control,access应该设置为:SNDDRV_CTL_ELEM_ACCESS_WRITE,这时,我们不必定义get回调函数。
如果control的值会频繁地改变(例如:电平表),我们可以使用VOLATILE类型,这意味着该control会在没有通知的情况下改变,应用程序应该定时地查询该control的值
五、回调函数
5.1 info回调函数
info回调函数用于获取control的详细信息。它的主要工作就是填充通过参数传入的snd_ctl_elem_info对象,以下例子是一个具有单个元素的boolean型control的info回调:
static int snd_myctl_mono_info(struct snd_kcontrol *kcontrol,
struct snd_ctl_elem_info *uinfo)
{
uinfo->type = SNDRV_CTL_ELEM_TYPE_BOOLEAN;
uinfo->count = 1;
uinfo->value.integer.min = 0;
uinfo->value.integer.max = 1;
return 0;
}
ype字段指出该control的值类型,值类型可以是BOOLEAN, INTEGER, ENUMERATED, BYTES,IEC958和INTEGER64之一。count字段指出了改control中包含有多少个元素单元,比如,立体声的音量control左右两个声道的音量值,它的count字段等于2。value字段是一个联合体(union),value的内容和control的类型有关。其中,boolean和integer类型是相同的。
ENUMERATED类型有些特殊。它的value需要设定一个字符串和字符串的索引,请看以下例子:
static int snd_myctl_enum_info(struct snd_kcontrol *kcontrol,
struct snd_ctl_elem_info *uinfo)
{
static char *texts[4] = {
"First", "Second", "Third", "Fourth"
};
uinfo->type = SNDRV_CTL_ELEM_TYPE_ENUMERATED;
uinfo->count = 1;
uinfo->value.enumerated.items = 4;
if (uinfo->value.enumerated.item > 3)
uinfo->value.enumerated.item = 3;
strcpy(uinfo->value.enumerated.name,
texts[uinfo->value.enumerated.item]);
return 0;
}
alsa已经为我们实现了一些通用的info回调函数,例如:snd_ctl_boolean_mono_info(),snd_ctl_boolean_stereo_info()等等。
5.2 get回调函数
该回调函数用于读取control的当前值,并返回给用户空间的应用程序。
static int snd_myctl_get(struct snd_kcontrol *kcontrol,
struct snd_ctl_elem_value *ucontrol)
{
struct mychip *chip = snd_kcontrol_chip(kcontrol);
ucontrol->value.integer.value[0] = get_some_value(chip);
return 0;
}
value字段的赋值依赖于control的类型(如同info回调)。很多声卡的驱动利用它存储硬件寄存器的地址、bit-shift和bit-mask,这时,private_value字段可以按以下例子进行设置:
.private_value = reg | (shift << 16) | (mask << 24);
然后,get回调函数可以这样实现:
static int snd_sbmixer_get_single(struct snd_kcontrol *kcontrol,
struct snd_ctl_elem_value *ucontrol)
{
int reg = kcontrol->private_value & 0xff;
int shift = (kcontrol->private_value >> 16) & 0xff;
int mask = (kcontrol->private_value >> 24) & 0xff;
....
//根据以上的值读取相应寄存器的值并填入value中
}
如果control的count字段大于1,表示control有多个元素单元,get回调函数也应该为value填充多个数值。
5.3 put回调函数
put回调函数用于把应用程序的控制值设置到control中。
static int snd_myctl_put(struct snd_kcontrol *kcontrol,
struct snd_ctl_elem_value *ucontrol)
{
struct mychip *chip = snd_kcontrol_chip(kcontrol);
int changed = 0;
if (chip->current_value !=
ucontrol->value.integer.value[0]) {
change_current_value(chip,
ucontrol->value.integer.value[0]);
changed = 1;
}
return changed;
}
如上述例子所示,当control的值被改变时,put回调必须要返回1,如果值没有被改变,则返回0。如果发生了错误,则返回一个负数的错误号。
和get回调一样,当control的count大于1时,put回调也要处理多个control中的元素值
六、创建Controls
当把以上讨论的内容都准备好了以后,我们就可以创建我们自己的control了。alsa-driver为我们提供了两个用于创建control的API:
snd_ctl_new1()
snd_ctl_add()
我们可以用以下最简单的方式创建control:
err = snd_ctl_add(card, snd_ctl_new1(&my_control, chip));
if (err < 0)
return err;
在这里,my_control是一个之前定义好的snd_kcontrol_new对象,chip对象将会被赋值在kcontrol->private_data字段,该字段可以在回调函数中访问。
snd_ctl_new1()会分配一个新的snd_kcontrol实例,并把my_control中相应的值复制到该实例中,所以,在定义my_control时,通常我们可以加上__devinitdata前缀。snd_ctl_add则把该control绑定到声卡对象card当中。
七、元数据(Metadata)
很多mixer control需要提供以dB为单位的信息,我们可以使用DECLARE_TLV_xxx宏来定义一些包含这种信息的变量,然后把control的tlv.p字段指向这些变量,最后,在access字段中加上SNDRV_CTL_ELEM_ACCESS_TLV_READ标志,就像这样:
static DECLARE_TLV_DB_SCALE(db_scale_my_control, -4050, 150, 0);
static struct snd_kcontrol_new my_control __devinitdata = {
...
.access = SNDRV_CTL_ELEM_ACCESS_READWRITE |
SNDRV_CTL_ELEM_ACCESS_TLV_READ,
...
.tlv.p = db_scale_my_control,
};
DECLARE_TLV_DB_SCALE宏定义的mixer control,它所代表的值按一个固定的dB值的步长变化。该宏的第一个参数是要定义变量的名字,第二个参数是最小值,以0.01dB为单位。第三个参数是变化的步长,也是以0.01dB为单位。如果该control处于最小值时会做出mute时,需要把第四个参数设为1。
DECLARE_TLV_DB_LINEAR宏定义的mixer control,它的输出随值的变化而线性变化。 该宏的第一个参数是要定义变量的名字,第二个参数是最小值,以0.01dB为单位。第二个参数是最大值,以0.01dB为单位。如果该control处于最小值时会做出mute时,需要把第二个参数设为TLV_DB_GAIN_MUTE。
这两个宏实际上就是定义一个整形数组,所谓tlv,就是Type-Lenght-Value的意思,数组的第0各元素代表数据的类型,第1个元素代表数据的长度,第三个元素和之后的元素保存该变量的数据。
八、Control设备的建立
Control设备和PCM设备一样,都属于声卡下的逻辑设备。用户空间的应用程序通过alsa-lib访问该Control设备,读取或控制control的控制状态,从而达到控制音频Codec进行各种Mixer等控制操作。
Control设备的创建过程大体上和PCM设备的创建过程相同。详细的创建过程可以参考本博的另一篇文章:Linux音频驱动之三:PCM设备的创建。下面我们只讨论有区别的地方。
我们需要在我们的驱动程序初始化时主动调用snd_pcm_new()函数创建pcm设备,而control设备则在snd_card_create()内被创建,snd_card_create()通过调用snd_ctl_create()函数创建control设备节点。所以我们无需显式地创建control设备,只要建立声卡,control设备被自动地创建。
和pcm设备一样,control设备的名字遵循一定的规则:controlCxx,这里的xx代表声卡的编号。我们也可以通过代码正是这一点,下面的是snd_ctl_dev_register()函数的代码:
/*
* registration of the control device
*/
static int snd_ctl_dev_register(struct snd_device *device)
{
struct snd_card *card = device->device_data;
int err, cardnum;
char name[16];
if (snd_BUG_ON(!card))
return -ENXIO;
cardnum = card->number;
if (snd_BUG_ON(cardnum < 0 || cardnum >= SNDRV_CARDS))
return -ENXIO;
/* control设备的名字 */
sprintf(name, "controlC%i", cardnum);
if ((err = snd_register_device(SNDRV_DEVICE_TYPE_CONTROL, card, -1,
&snd_ctl_f_ops, card, name)) < 0)
return err;
return 0;
}
snd_ctl_dev_register()函数会在snd_card_register()中,即声卡的注册阶段被调用。注册完成后,control设备的相关信息被保存在snd_minors[]数组中,用control设备的此设备号作索引,即可在snd_minors[]数组中找出相关的信息。注册完成后的数据结构关系可以用下图进行表述:
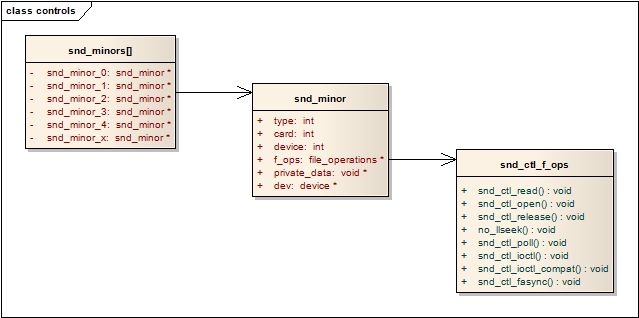
用户程序需要打开control设备时,驱动程序通过snd_minors[]全局数组和此设备号,可以获得snd_ctl_f_ops结构中的各个回调函数,然后通过这些回调函数访问control中的信息和数据(最终会调用control的几个回调函数get,put,info)。详细的代码我就不贴了,大家可以读一下代码:/sound/core/control.c。