计算机图形学:二维图形的几何变换(算法原理及代码实现)
一、实现方案
对于一个二维图形作平移、旋转、放缩变换,可以转换为在二维坐标系中图形的所有点分别可以对应到在x,y轴方向分别平移tx,ty(平移)、绕一点旋转固定的角(旋转)、在x,y轴方向分别放缩sx,sy倍。
对于变换的原理,只需要将原图形的点通过极坐标或者相加、相乘,再结合二维矩阵的原理即可实现,如果图形需要对图形对象进行旋转和放缩两类变换进行多次操作,则可以首先将两变换矩阵合成一个复合变换矩阵。针对于平移是矩阵的相加,为了统一成相乘,可以用齐次坐标可以解决。
如下为在齐次坐标下,各原点与变换矩阵形式。
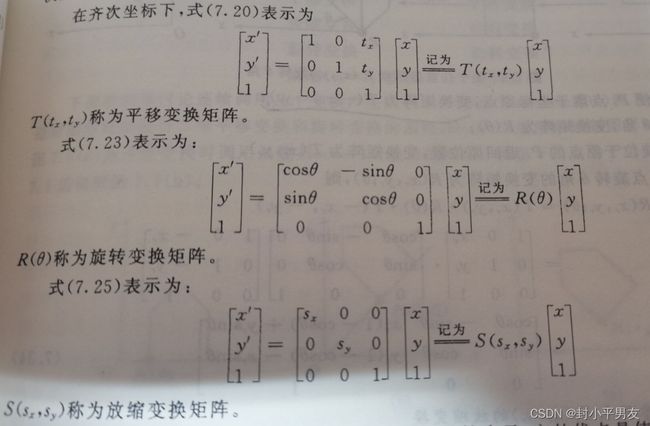
所以,若要完成更复杂的变换,可以通过将这些基本变换合成一个复合变换,将多次运算转换成的一次性矩阵与向量相乘即可完成复杂变换。
如任一图形关于任意的反射轴y=a+bx的反射变换,可以转换为(1)平移-a;(2)旋转至与x/y轴重合;(3)沿x/y轴对称;(3)旋转回(2)之前的位置;(4)平移a四步即可完成。
二、代码实现
// CMatrixView 绘图
//变换矩阵
struct Matrix {
double a[10][10];
Matrix() {
memset(a, 0, sizeof(a));
}
void init(){
for (int i = 0; i <= 4; i++) {
a[i][i] = 1;
}
}
};
//坐标点
struct Point
{
double x, y;
};
//矩阵相乘
Matrix get_mx(Matrix a, Matrix b) {
Matrix tmp;
for (int i = 0; i < 3; i++) {
for (int j = 0; j < 3; j++) {
double sum=0;
for (int k = 0; k < 3; k++){
sum += a.a[i][k] * b.a[k][j];
}
tmp.a[i][j] = sum;
}
}
return tmp;
}
//得到与矩阵相乘后的点
Point matrix_point(Point p, Matrix m) {
Matrix n;
n.a[0][0] = p.x;
n.a[1][0] = p.y;
n.a[2][0] = 1;
for (int i = 0; i < 3; i++) {
double sum = 0;
for (int j = 0; j < 3; j++) {
sum+= m.a[i][j] * n.a[j][0];
}
n.a[i][1] = sum;
}
p.x = n.a[0][1] / n.a[2][1];
p.y = n.a[1][1] / n.a[2][1];
return p ;
}
//平移
Matrix translate(double Tx, double Ty, Matrix m) {
Matrix tmp;
tmp.init();
tmp.a[0][2] = Tx;
tmp.a[1][2] = Ty;
tmp = get_mx(m, tmp);
return tmp;
}
//放缩
Matrix Shrink(double Tx, double Ty, Matrix m){
Matrix tmp;
tmp.init();
tmp.a[0][0] = Tx;
tmp.a[1][1] = Ty;
tmp = get_mx(m, tmp);
return tmp;
}
//旋转
Matrix revolve(double cot, Matrix m) {
Matrix tmp;
tmp.init();
tmp.a[0][0] = cos(cot);
tmp.a[1][1] = cos(cot);
tmp.a[0][1] = -(sin(cot));
tmp.a[1][0] = sin(cot);
tmp = get_mx(m, tmp);
return tmp;
}
//轴对称
Matrix axisymmetric(int x, Matrix m) {
Matrix tmp;
tmp.init();
//x==1为x轴对称
if (x == 1) {
tmp.a[1][1] = -1;
}
//否则为y轴对称
else {
tmp.a[0][0] = -1;
}
tmp = get_mx(m, tmp);
return tmp;
}
//关于任意轴对称
Matrix symmetry(double k, double b, Matrix m) {
Matrix tmp;
tmp.init();
//先平移
double cot = atan(k);
tmp = translate(0, -b, tmp);
//再旋转
tmp = revolve(cot, tmp);
//再沿x轴对称
tmp = axisymmetric(1, tmp);
//再旋转
tmp = revolve(-cot, tmp);
//再平移
tmp = translate(0, b, tmp);
tmp = get_mx(m, tmp);
return tmp;
}
void Line(CDC* pDC, Point p1, Point p2) {
pDC->MoveTo(p1.x, p1.y);
pDC->LineTo(p2.x, p2.y);
}
void Linepoly(CDC* pDC, Point p1, Point p2,Point p3,int color) {
CPen m_newPen, * m_oldPen;
//创建新画笔
m_newPen.CreatePen(PS_SOLID, 3,color);
//将新画笔选入设备上下文,并且保存旧画笔
m_oldPen = pDC->SelectObject(&m_newPen);
pDC->MoveTo(p1.x, p1.y);
pDC->LineTo(p2.x, p2.y);
pDC->MoveTo(p2.x, p2.y);
pDC->LineTo(p3.x, p3.y);
pDC->MoveTo(p3.x, p3.y);
pDC->LineTo(p1.x, p1.y);
pDC->SelectObject(m_oldPen);
}
//实现程序:
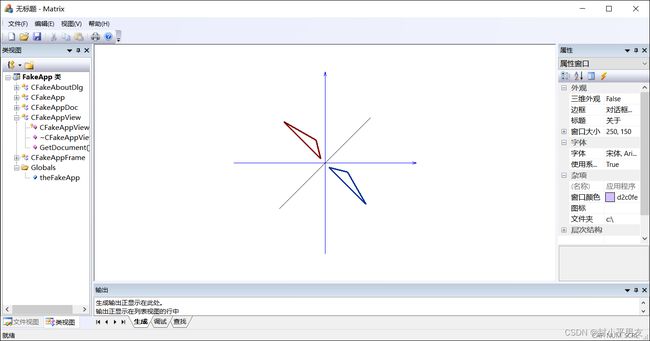
//沿任意轴对称
Point p7 = { -10,10 };
Point p8 = { -90,90 };
Point p9 = { -20,50 };
//变换前为棕红色
Linepoly(pDC, p7, p8, p9,RGB(128,0,0));
Point p10 = { -100,-100 };
Point p11 = {100,100};
Line(pDC, p10, p11);
Matrix m4;
m4.init();
m4 = symmetry(1, 0, m4);
p7 = matrix_point(p7, m4);
p8 = matrix_point(p8, m4);
p9 = matrix_point(p9, m4);
//变换后为蓝色
Linepoly(pDC, p7, p8, p9,RGB(0,51,153));三、代码运行结果