学习笔记-李沐动手学深度学习(一)(01-07,概述、数据操作、tensor操作、数学基础、自动求导(前向计算、反向传播))
个人随笔
第三列是 jupyter记事本

官方github上啥都有(代码、jupyter记事本、胶片)
https://github.com/d2l-ai

多体会
【梯度指向的是值变化最大的方向】
符号

维度
(弹幕说)2,3,4越后面维度越低 4就是一维有4个标量
00-预告



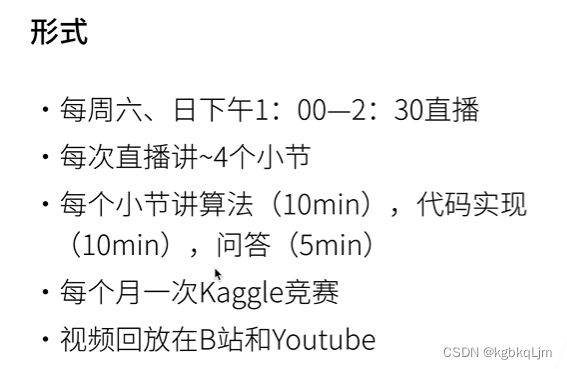
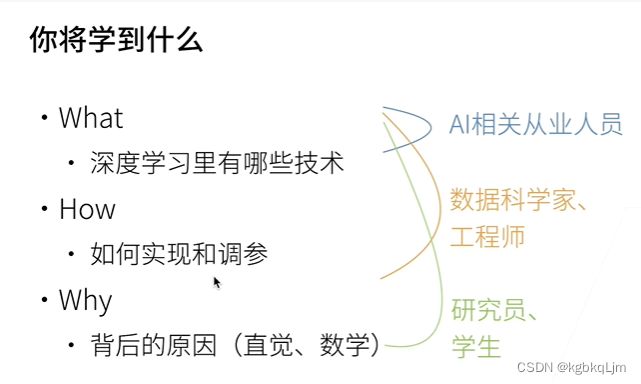
01-课程安排
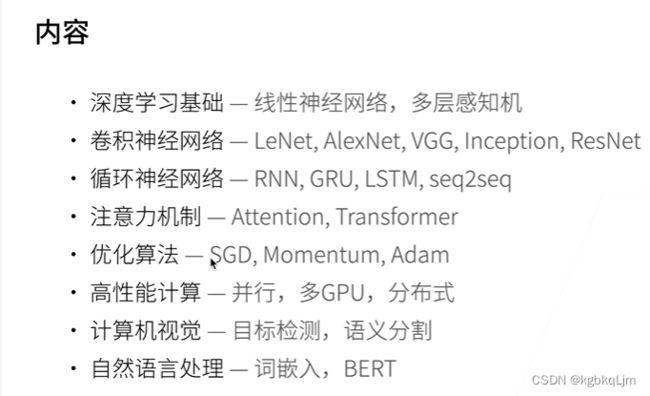

02-深度学习介绍
【语言是一个符号】
【深度学习是机器学习的一种】
最热的方向:深度学习和CV、NLP结合
【AI地图】
① 如下图所示,X轴是不同的模式,最早的是符号学,然后概率模型、机器学习。Y轴是我们想做什么东西,感知是我了解这是什么东西,推理形成自己的知识,然后做规划。
② 感知类似我能看到前面有个屏幕,推理是基于我看到的东西想象未来会发生什么事,根据看到的现象、数据,形成自己的知识,知道所有知识后能进行长远的规划,未来怎么做
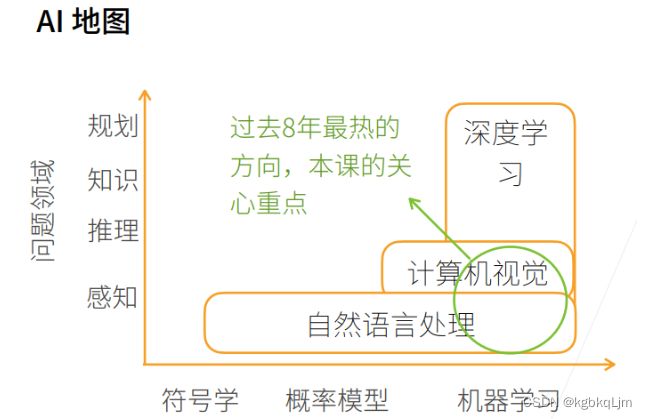
① 自然语言处理目前还是停留在感知上,人几秒钟能反应过来的东西都属于感知范围,即使像中文翻译成英文,英文翻译成中文那种。
② 计算机视觉可以在图片里面可以做一些推理。
③ 自然语言处理里面有符号,所以有符号学,并且还可以用概率模型、机器学习。计算机视觉面对的是图片,图片里面都是一个个像素,像素很难用符号学来解释,所以计算机视觉大部分用概率模型、机器学习来解释。
④ 深度学习是计算机视觉中的一种方法,它还有其他应用方法。
图片分类

① 可以看到从12年开始,图片分类错误率开始有一个比较大的下降,12年就是深度学习引入图片分类的开始。
② 17年的时候,几乎所有的团队都可以做到5%以内的错误率,基本上可以达到人类在图片识别上的精度了。可以说在图片分类上,深度学习已经做的很好了

物体检测和分割
① 知道图片是内容,在什么地方,这就是物体检测。
② 物体分割是指每个像素它到底是飞机还是人。

样式迁移
相当于滤镜

人脸合成

文字生成图片
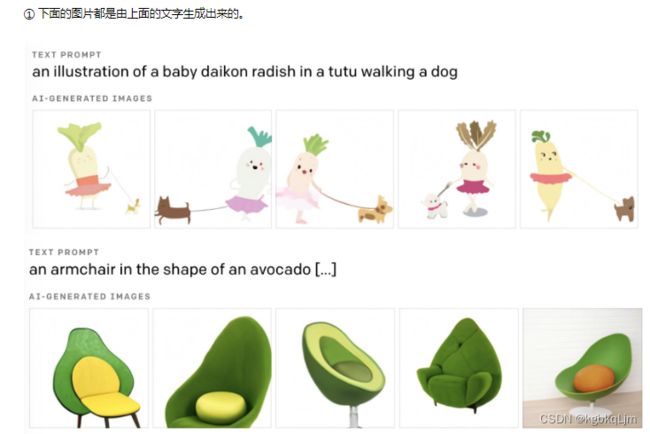
文字生成

无人驾驶

【案例】广告点击
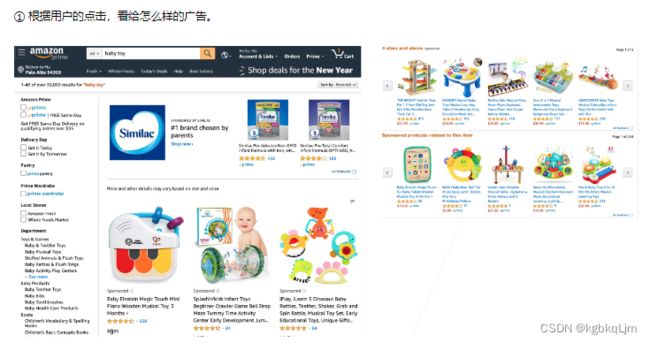
p是用户点击的概率


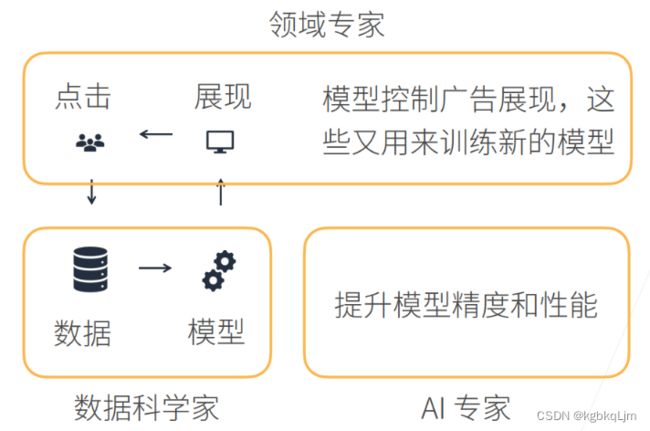
【完整的故事】
QA
有效和可解释性是不同的
有效应该是 简单的解释一下
可解释性更深入
领域专家:甲方、产品经历、提业务需求的人,了解业务的人
数据科学家:乙方,实现需求的人, 搬砖工程师(偏广)
AI专家: 资深数据科学家, 不仅能实现 还要提高精度(偏深)
如何找论文?后续会讲
03-安装(CPU,后续将GPU)
d2l:Diving Into Deep Learning动手学深度学习的缩写

conda env remove d2l-zh
conda create -n d2l-zh -y python=3.8 pip
conda activate d2l-zh
pip install -y jupyter d2l torch torchvision
wget https://zh-v2.d2l.ai/d2l-zh.zip
unzip d2l-zh.zip
jupyter notebook
弹幕说:这个create -n -y d2l啥的不行啊,改成create -n d2l -y可以用了
老师操作(感觉本地配环境,这部分全都可以跳过)
视频中老师演示的是在亚马逊云上 创建的云环境ubuntu18.04,并且刚拿到机器后装了一些基本的内容:miniconda(具体在linux系统下安装时再看吧)

本地连接远程机器:
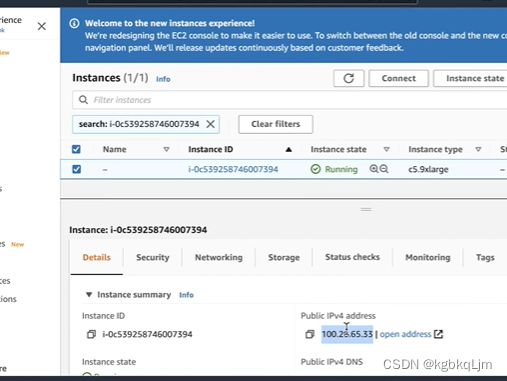
此时连接成功,后面有很多细节,安装 基本东西来着:(apt是一种linux的包管理软件)
sudo apt update更新机器
sudo apt install build-essential
sudo apt install python3.8
安装miniconda,复制官网链接,本地wget+链接安装:(是什么系统就装什么)


bash本地安装miniconda:
![]()
yes
![]()
此时就安装到 机器的根目录下,然后bash后就进入了conda环境

此时可以在conda环境上安装各种需要的包
![]()
老师基于【wget 下载地址链接】 即可下载下来,下载地址链接是到了安装包链接后右键copy如下图

![]()
然后自己装unzip并解压
![]()

视频用的pytorch版本

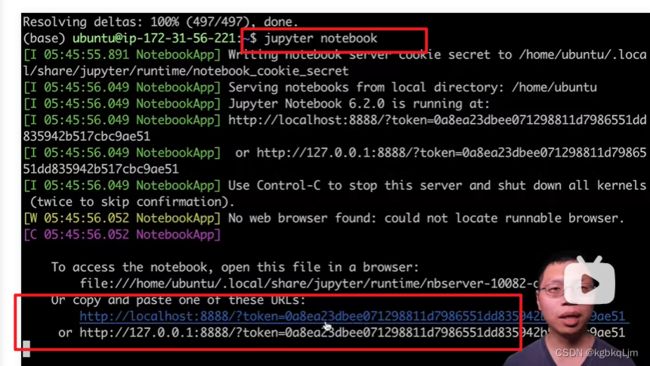
老师后面将远端地址(因为是 本地ssh远程连接到了 亚马逊云上的一台ubuntu18.04)映射到了本地机器

此时可以启动jupyter后直接访问 刚刚下载的课程的jupyter
看到刚刚装的东西

本地实操
【实操】用conda创建一个python=3.8名为ljm-d2l-learn的虚拟环境
conda create -n ljm-d2l-leran -y python=3.8
conda env list查看环境
conda activate ljm-d2l-learn进行环境
pip install jupyter d2l torch torchvision安装(开梯子巨快)
pip install rise安装rise插件,这样可以 以幻灯片方式查看 jupyter记事本中的课件
rise安装前,显示jupyter中幻灯片内容的效果:

rise安装后:
刷新页面后点击这个

以幻灯片形式展示:

自己测试了一下,在base环境上就能显示该按钮
04-数据操作+数据预处理
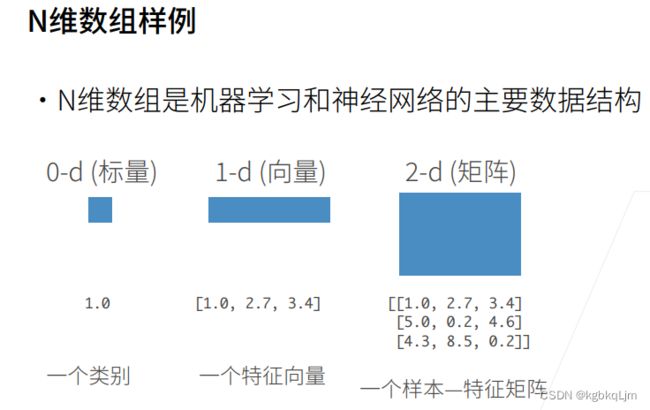
N维数组
① 机器学习用的最多的是N维数组,N维数组是机器学习和神经网络的主要数据结构。
笔记中所提到的x维tensor和x维数组是一回事
0维:标量(即一个数字)
1维:向量
2维:矩阵(每一行是一个样本,每一列是不同样本的相同种特征)
3维:如图片
4维:n个三维数组放在一起,如一个RGB图片的批量,一个batch
5维:如视频的批量(多了一个时间的维度)

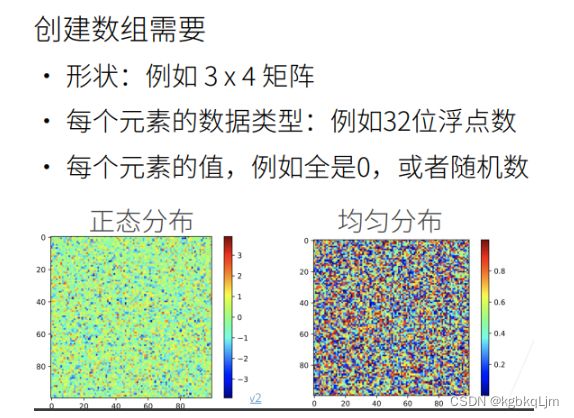
创建数组
① 创建数组需要:形状、指定每个元素的数据类型、元素值。
如下图表示 所有元素的值是 按照正态分布表示的, 右图指 元素值 可以按均匀分布来产生
访问元素
① 可以根据切片,或者间隔步长访问元素。
② [::3,::2]是每隔3行、2列访问。
注:索引都是从0开始
1.访问第一行第二列的元素
2.访问第一行所有元素
3.访问第一列所有元素
4.访问第一至三行(左闭右开,即 第一、二行,不含第三行) 的 第一列及之后的所有元素
5.跳着访问:每隔3行 、每隔两列 取一个元素

张量(tensor)数据操作
多体会
1.看打印出的tensor中括号数量来判断tensor(或者说数组)是几维的
二维数组:
含三个一维数组的二维数组

三维数组:
含一个二维数组的三维数组

含两个二维数组的三维数组
2.打印出来的torch.Size()中的 一维数组中有几个元素就是几维数组
个人补充-为什么需要张量?张量的意义?
1.支持基于GPU加速(numpy型数据不支持)
2.支持自动求导(自动微分)(即计算梯度)
3.tensor类型数据变换更灵活多样
(土堆)包装了神经网络所需的理论基础参数的数据类型


【开源博主完整代码】
# 查看pytorch中的所有函数名或属性名
import torch
print(dir(torch.distributions))
print('1.张量的创建')
# ones 函数创建一个具有指定形状的新张量,并将所有元素值设置为 1
t = torch.ones(4)
print('t:', t)
x = torch.arange(12)
print('x:', x)
print('x shape:', x.shape) # 访问向量的形状
y = x.reshape(3, 4) # 改变一个张量的形状而不改变元素数量和元素值
print('y:', y)
print('y.numel():', y.numel()) # 返回张量中元素的总个数
z = torch.zeros(2, 3, 4) # 创建一个张量,其中所有元素都设置为0
print('z:', z)
w = torch.randn(2, 3, 4) # 每个元素都从均值为0、标准差为1的标准高斯(正态)分布中随机采样。
print('w:', w)
q = torch.tensor([[1, 2, 3], [4, 3, 2], [7, 4, 3]]) # 通过提供包含数值的 Python 列表(或嵌套列表)来为所需张量中的每个元素赋予确定值
print('q:', q)
print('2.张量的运算')
x = torch.tensor([1.0, 2, 4, 8])
y = torch.tensor([2, 2, 2, 2])
print(x + y)
print(x - y)
print(x * y)
print(x / y)
print(x ** y) # **运算符是求幂运算
print(torch.exp(x))
X = torch.arange(12, dtype=torch.float32).reshape(3, 4)
Y = torch.tensor([[2.0, 1, 4, 3], [1, 2, 3, 4], [4, 3, 2, 1]])
print('cat操作 dim=0', torch.cat((X, Y), dim=0))
print('cat操作 dim=1', torch.cat((X, Y), dim=1)) # 连结(concatenate) ,将它们端到端堆叠以形成更大的张量。
print('X == Y', X == Y) # 通过 逻辑运算符 构建二元张量
print('X < Y', X < Y)
print('张量所有元素的和:', X.sum()) # 张量所有元素的和
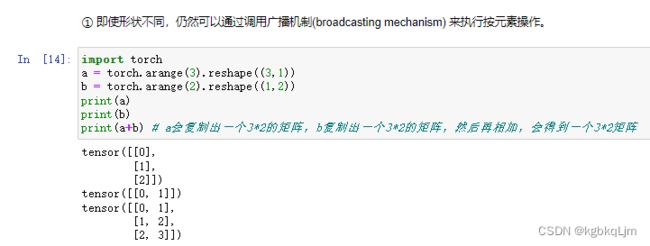
print('3.广播机制')
a = torch.arange(3).reshape(3, 1)
b = torch.arange(2).reshape(1, 2)
print('a:', a)
print('b:', b)
print('a + b:', a + b) # 神奇的广播运算
print('4.索引和切片')
X = torch.arange(12, dtype=torch.float32).reshape(3, 4)
print('X:', X)
print('X[-1]:', X[-1]) # 用 [-1] 选择最后一个元素
print('X[1:3]:', X[1:3]) # 用 [1:3] 选择第二个和第三个元素]
X[1, 2] = 9 # 写入元素。
print('X:', X)
X[0:2, :] = 12 # 写入元素。
print('X:', X)
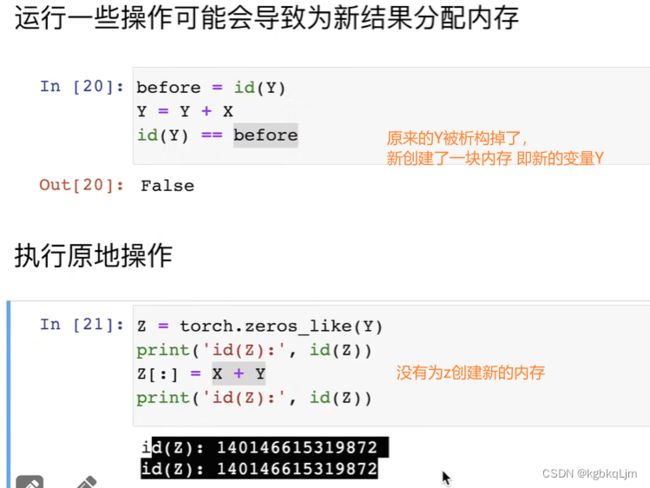
print('5.节约内存')
before = id(Y) # id()函数提供了内存中引用对象的确切地址
Y = Y + X
print(id(Y) == before)
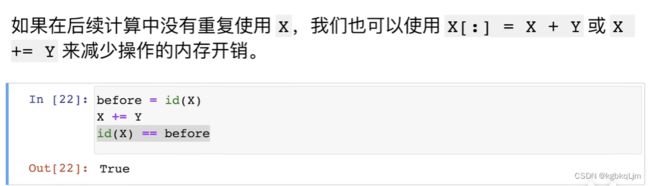
before = id(X)
X += Y
print(id(X) == before) # 使用 X[:] = X + Y 或 X += Y 来减少操作的内存开销。
before = id(X)
X[:] = X + Y
print(id(X) == before) # 使用 X[:] = X + Y 或 X += Y 来减少操作的内存开销。
print('6.转换为其他 Python对象')
Y = torch.tensor([[2.0, 1, 4, 3], [1, 2, 3, 4], [4, 3, 2, 1]])
A = Y.numpy()
print(type(A)) # 打印A的类型
print(A)
B = torch.tensor(A)
print(type(B)) # 打印B的类型
print(B)
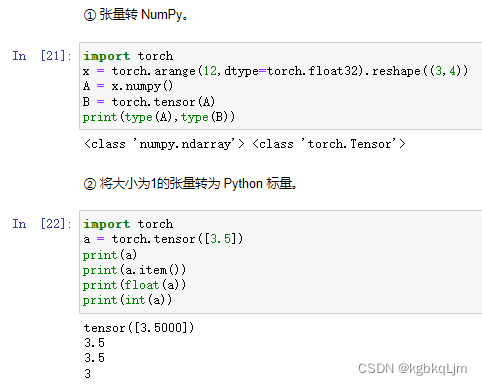
a = torch.tensor([3.5])
print(a, a.item(), float(a), int(a))
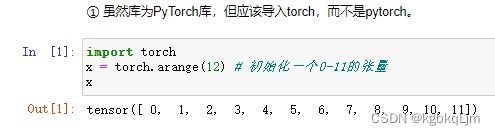
导入torch库
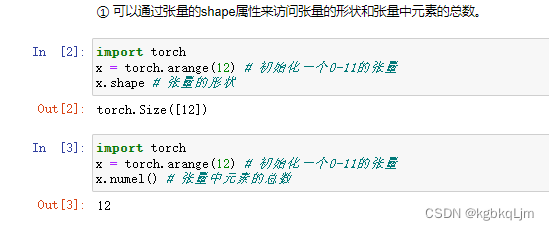
访问张量形状shape和元素总数numel
张量表示由一个数值组成的数组,这个数组可能有多个维度
x = torch.arange(12):初始化[0, 12) 左闭右开区间上的所有数字 为一个一维向量

x.shape
输出torch.Size([12]): 说明这是一个一维向量,该向量的长度为12
numel:number of element,张量中元素的总数,是一个标量(数值)

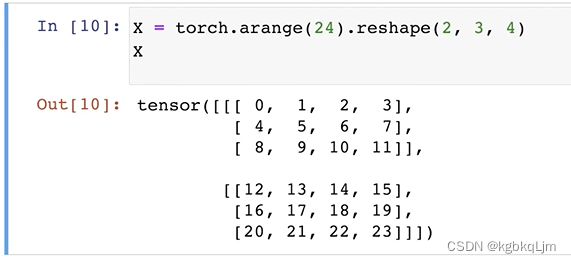
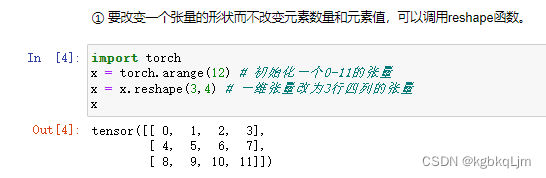
直接生成一个 形状为 3,4的 元素为 0-11的向量
![]()
改变张量形状reshape
x = x.reshape(3,4) # 一维张量改为3行四列的张量
创建全0、全1张量
y = torch.zeros((2,3,4)): 创建 形状为 (2,3,4)的全0 张量 (即2个3行4列的二维数组组成的三维数组)

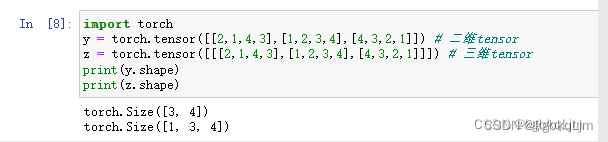
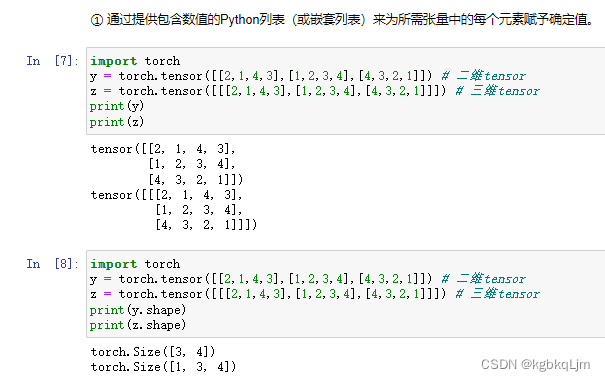
创建特定值张量
y = torch.tensor([[2,1,4,3],[1,2,3,4],[4,3,2,1]]) : 告诉torch 要创建的二维tensor(个人感觉的tips:因为有两个[ [)的
第一行元素是 [2,1,4,3]
第二行元素是[1,2,3,4]
第三行元素是[4,3,2,1]
z = torch.tensor([[[2,1,4,3],[1,2,3,4],[4,3,2,1]]]): 同理 三个 [ [ [ 就变成三维tensor
print(z.shape)
torch.Size([1, 3, 4]) : 一个 由一个三行四列的二维数组 组成的三维tensor(或称数组)(或者说 有一个三维数组, 其中有一个元素,该元素是一个 三行四列的二维数组)
【个人总结】打印出来的torch.Size()中的 一维数组中有几个元素就是几维数组
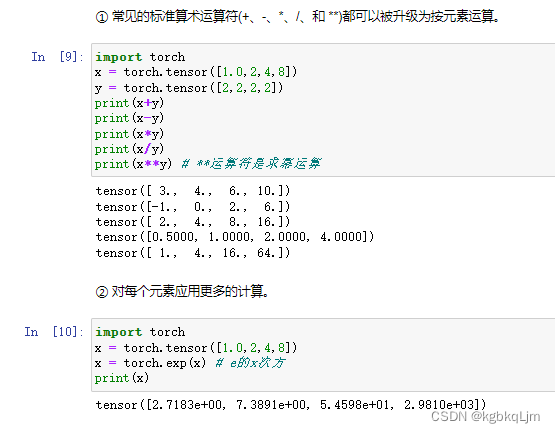
张量运算操作
所有的运算都是按元素进行的
x = torch.tensor([1.0,2,4,8]) :创建一个 元素类型都是浮点型的数组
x = torch.tensor([1,2,4,8]):创建一个元素类型都是整型的数组
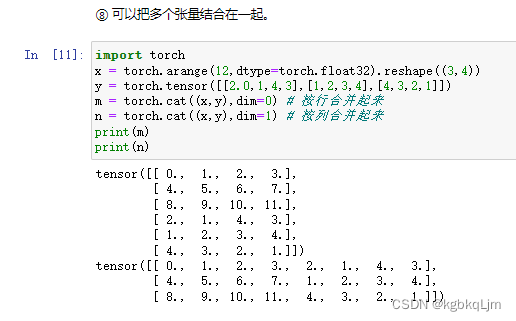
张量合并操作(torch.cat)
cat>合并两个数组,dim.在第几维上进行合并
x = torch.arange(12,dtype=torch.float32).reshape((3,4))
y = torch.tensor([[2.0,1,4,3],[1,2,3,4],[4,3,2,1]])
m = torch.cat((x,y),dim=0) # 按第0个维度(对于二维数组来说,0就是行)合并起来
n = torch.cat((x,y),dim=1) # 按第一个维度(对于二维数组来说,1就是列)合并起来
弹幕说:个人理解,dim=0 添加记录,dim=1拼接特征
dim=几,就在第几个中括号内合并
0,1用作方向的表示方法在pytorch和numpy中有很多
0 和 1 这种表示法与 .shape的结果是对应的,0代表沿着第0个维度,1代表沿着第1个维度
张量逻辑运算(根据逻辑运算符构建二元张量)

张量累加运算(.sum())

张量广播运算
前提是需要 两个tensor的维度相同,形状可以不同(在新版本的python和torch中好像 条件放宽了,可能是和numpy中广播的要求一致,具体用到再看)
注意:numpy中的广播和pytorch中的广播的要求好像在不同的python版本中有不同?torch中要求广播运算的两个tensor维度必须相同、形状可不同(好像 对于新版本的python和pytorch的广播要求和numpy的一致了,具体用到再看);numpy中在某些维度不同的数组之间也能进行广播
numpy中的广播
广播原则(broadcast)(尤其是形状不同的两个数组进行计算时)
广播:一个人说话,大家都能听见
【个人总结】 从数组的形状 的后面向前数,
tips:对于二维数组,如果二者的行形状相同或列形状相同,就可以计算
形状为(3,3,2)和(3,3)的数组不能运算
形状为(3,3,2)和(3,2)的数组可以运算
(4,1)和(4,6)可以
(1,6)和(4,6)可以





张量访问运算
x[-1]:访问最后一行
x[1:3]:访问第1、2行

张量元素改写

张量内存变化
id:类似于C++中的指针(相当于一个变量的唯一标识号)
如下图中: 之前的变量y相当于被析构掉了(新的变量Y的id不等于以前的)

tensor和Numpy互转
数据预处理
csv全称“Comma-Separated Values”
创建数据集
csv文件中的每列含义: 房子有多少房间,进门的路是什么样的,房子的价格
NA:未知的

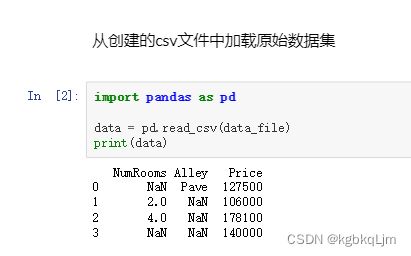
加载数据集

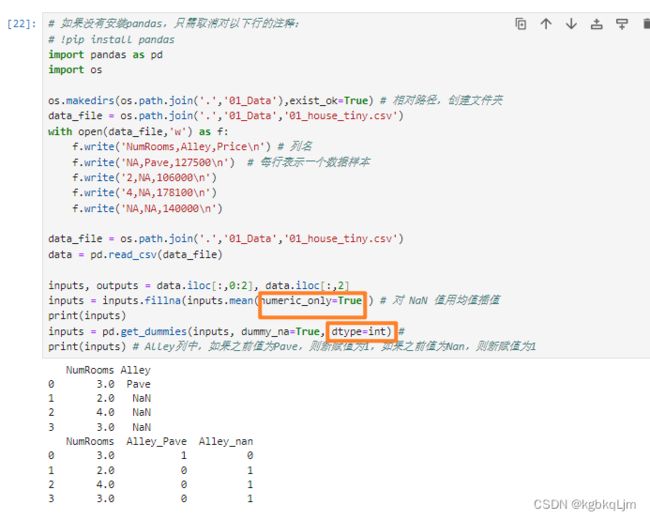
【举例】读取一个csv文件并预处理为pytorch中的tensor(含pandas基本操作)
iloc:index location
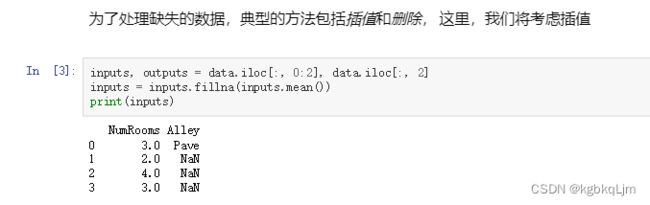
遇到Na数据: 通常可以丢掉,但是太可惜了。因此常用的是 插值法(如本例中,将 原来是NaN的数据 填成剩下的元素的均值,如2和4的均值是3)

【过程】
1.原数据:
处理:
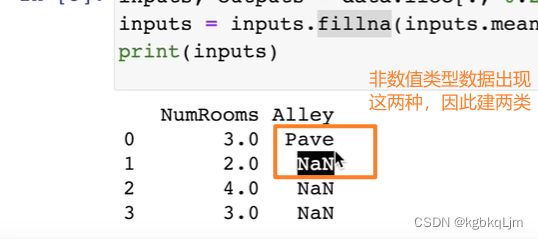
2.对于数值类型数据:拿到输入和输出数据,并 将输入数据中(是数字类型的数据)缺失值NaN填为 剩下的数据的均值
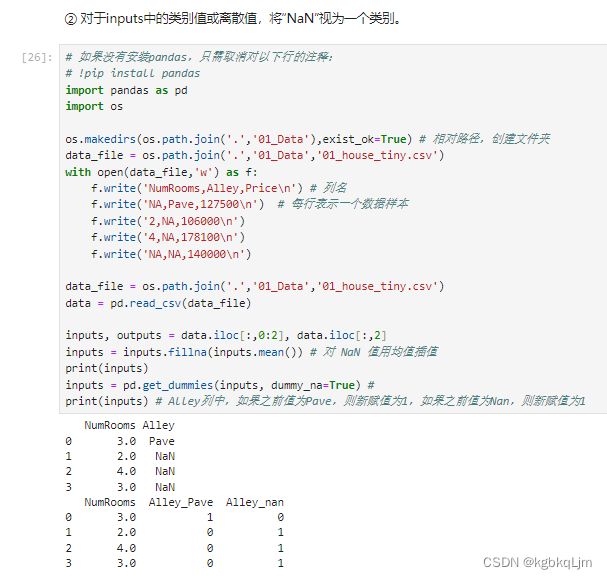
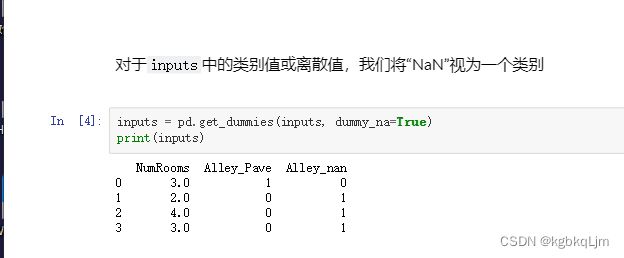
3.对于非数值类型数据:
方法一是将 所有NaN的非数值数据单独做成一个特别的类(化为one-hot)
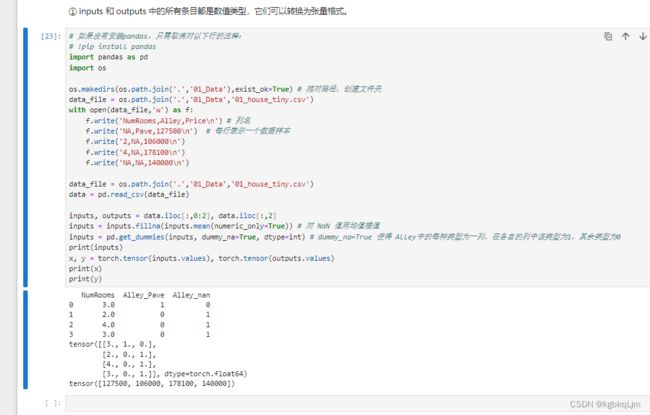
4.现在我们已经将所有的缺失值NaN和字符串 都变成了数值,此时就可以 将数据变为pytorch的tensor了
如下
QA
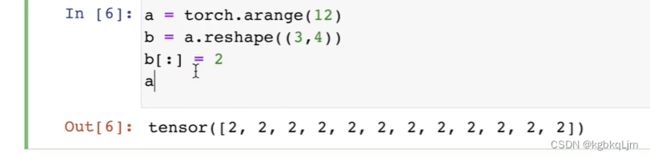
1.view和reshape的区别:
弹幕说:数据库里面的View是视图,视图的作用就是提供更为便利的方式去操作数据。
如下图举个例子(实际 这种情况很少见)
改b就相当于直接把a改了
3.如何看维度:
.shape()
.dim()方法
(弹幕说)2,3,4越后面维度越低 4就是一维有4个标量
4.pytorch的tensor和numpy的ndarray类似吗?
不类似
5.tensor和array的区别:
tensor是数学上的概念,ndarray是 n dimensionarray
array是计算机中的概念
但我们是混着用的,类似的
(弹幕说)传统张量在力学里面用的挺多,和深度学习的张量确实不是一个东西感觉~
6.有图形化的torch编程方案吗
暂无
7.内存?
python一般会自动释放
9.view和reshape没有本质区别
弹幕说:建議reshape,view報錯的可能情況更多
05-线性代数
理论

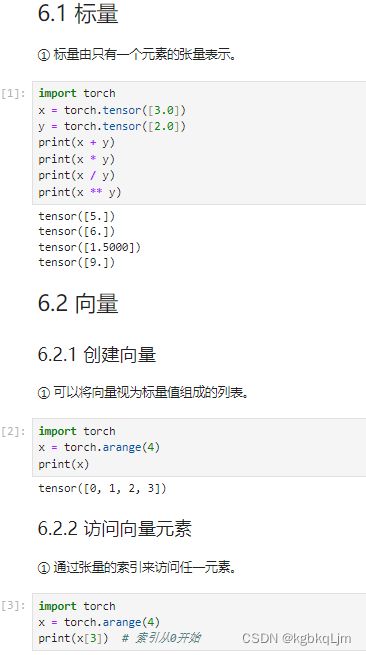
标量:
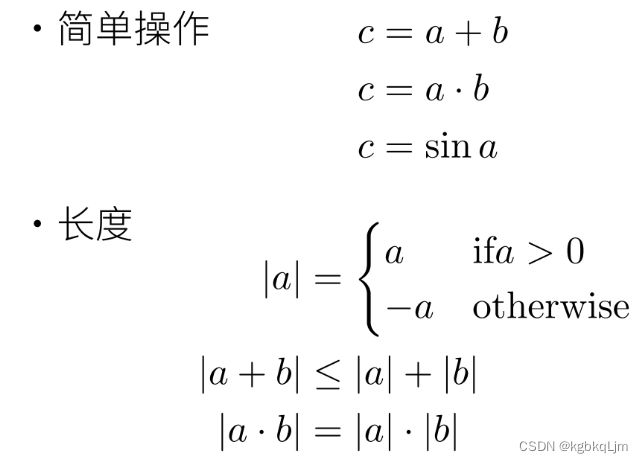
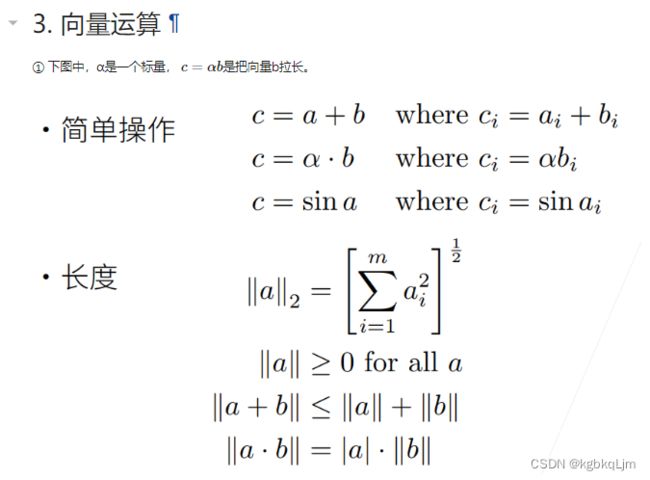
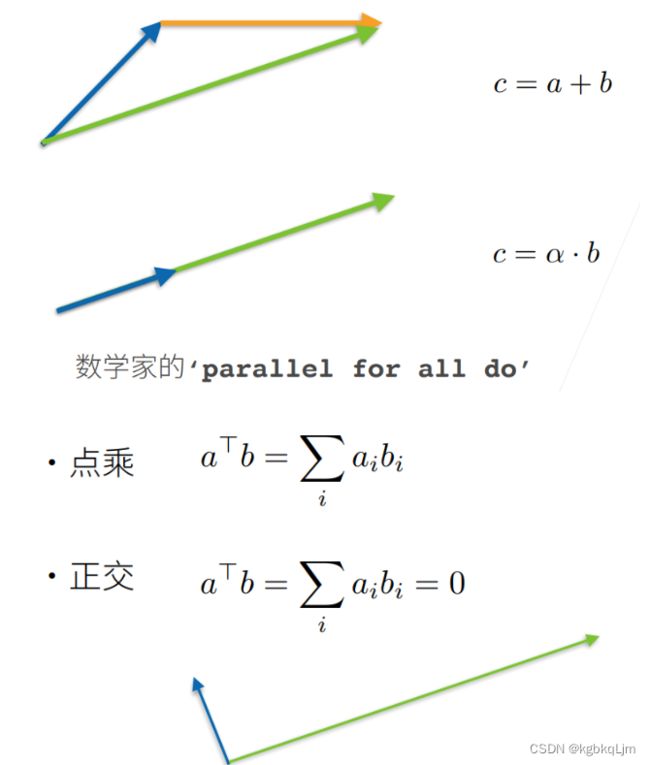
向量:
矩阵:
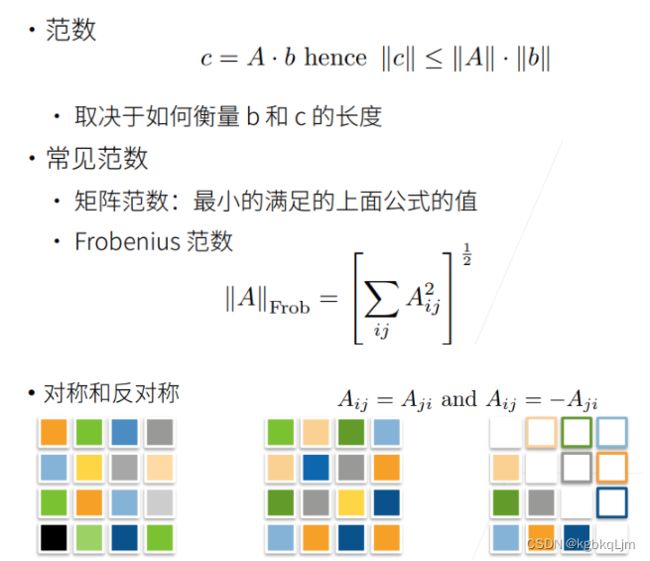
矩阵的范数:
正交矩阵:

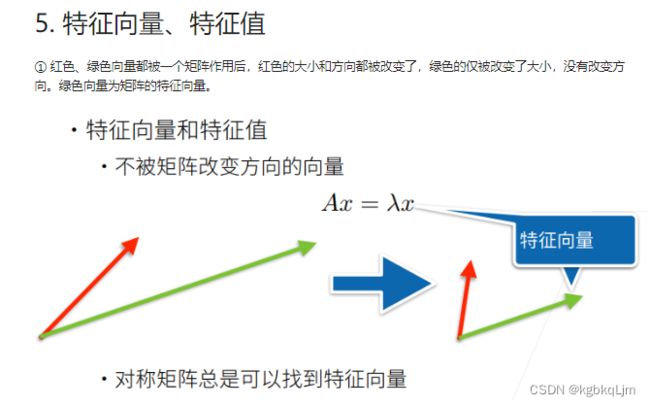
特征向量和特征值:
代码实现
标量、向量(创建和访问向量元素)
向量长度、向量维度、创建矩阵

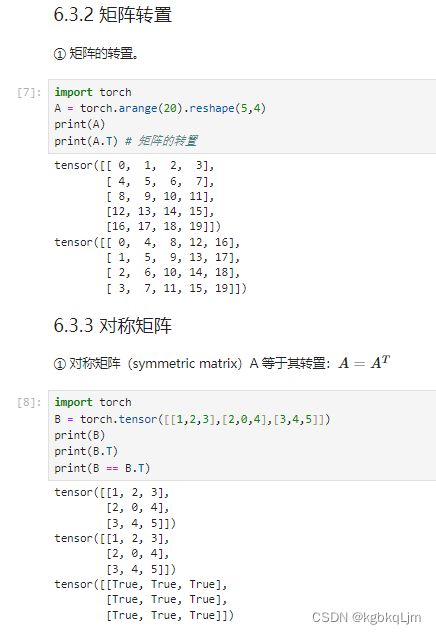
矩阵转置、对称矩阵
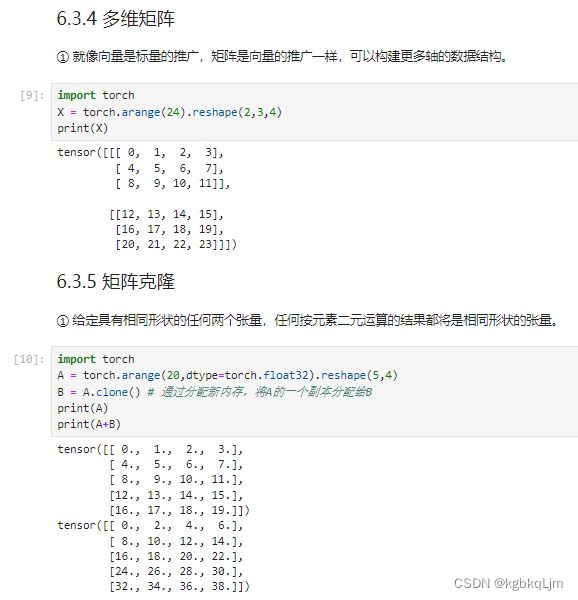
多维矩阵、矩阵克隆
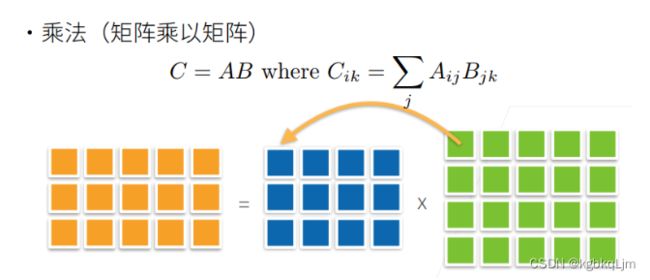
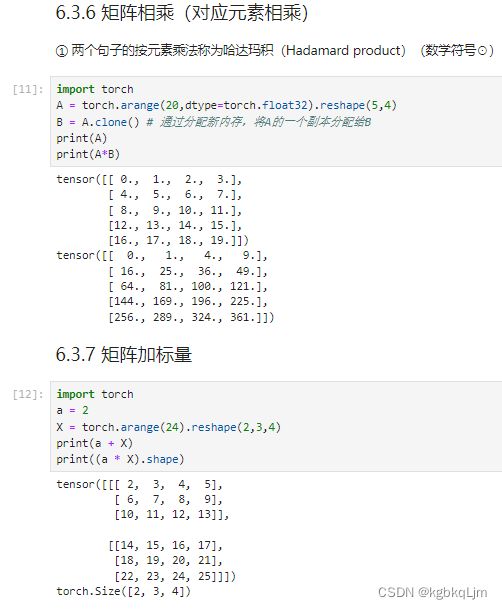
矩阵相乘、矩阵加标量
哈达玛积(矩阵按元素乘法)
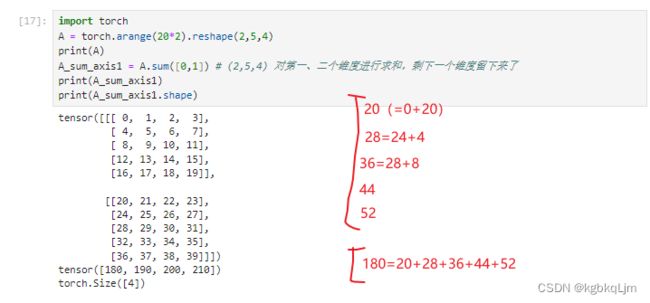
向量求和、矩阵求和

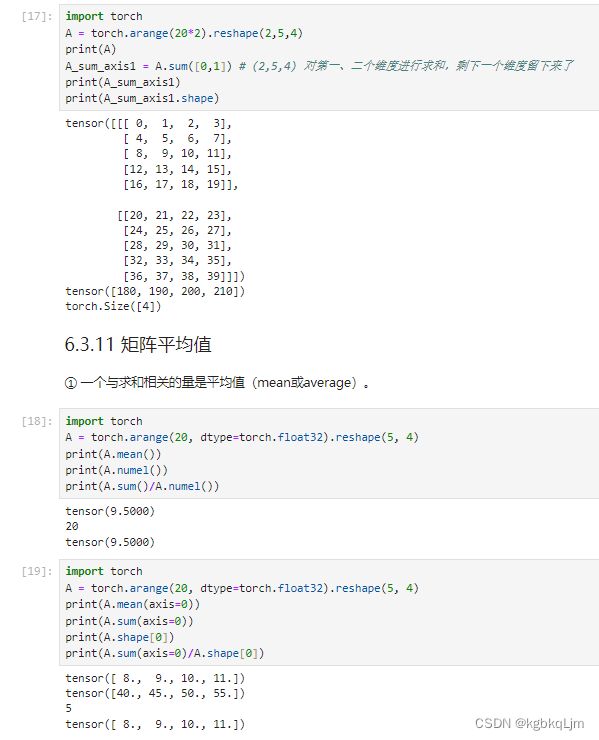
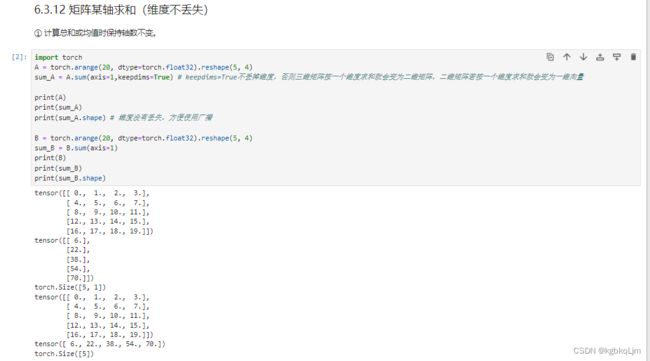
矩阵按某轴求和(计算后丢掉维度)、矩阵平均值mean
按哪个轴求和
弹幕说:
对哪个维度求和,就把哪个维度的数值变为1,比如第0个维度是2,对该维度求和就是把该维度变为1,即将该维度的数加在一起,再比如第一个维度是5(行),就把相同列的5行的数加起来,即把这个维度变为1
对哪个维度求和,最终发生改变的就是哪个维度,即该维度消失


两个维度求和:个人理解即 先对第一个维度求和,再对第二个维度求和
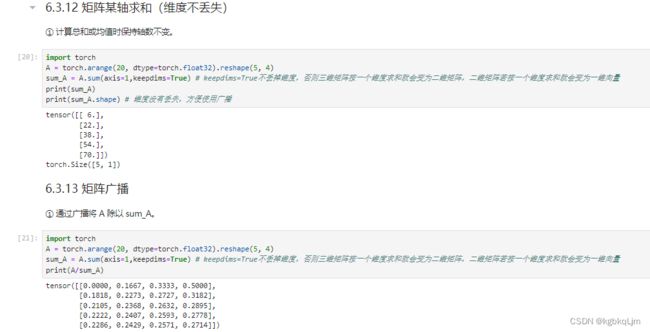
矩阵按某轴求和(计算后不丢掉维度)、矩阵广播
目的:按照某个维度求和时,不想将该维度丢掉(丢掉后的结果如上面几个图, 即如果一个三维矩阵按一个维度求和后 会变成二维矩阵,如果一个二维矩阵按一个维度求和会变成一个标量)
实现:设置keepdims=True。好处是可以 用于后续实现广播操作
注意:numpy中的广播和pytorch中的广播的要求好像在不同的python版本中有不同?torch中要求广播运算的两个tensor维度必须相同、形状可不同(好像 对于新版本的python和pytorch的广播要求和numpy的一致了,具体用到再看);numpy中在某些维度不同的数组之间也能进行广播
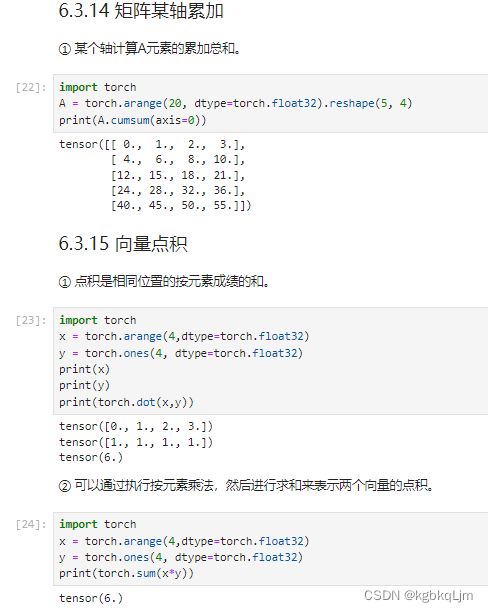
矩阵某轴累加cumsum(前缀和)、向量点积dot

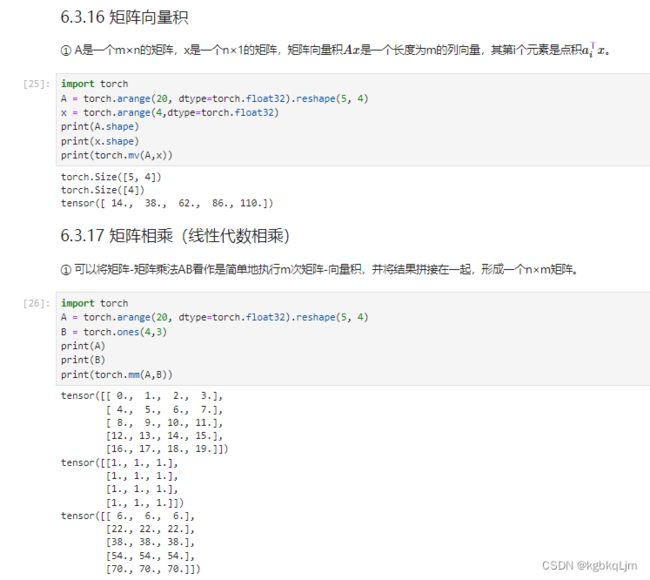
矩阵向量积(mv ,Matrix Vector Multiplication)、矩阵相乘
注意理解pytorch中轴的方向:torch.Size([4])代表一个 长度为4的列向量 (可以回看dim=0的方向)
矩阵L2范数norm、L1范数abs().sum()、F范数norm

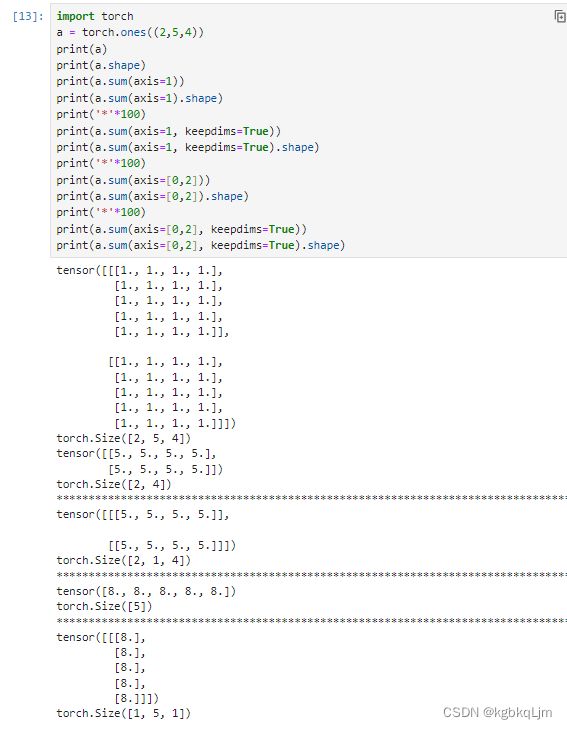
【补充】按特定轴求和
按那个(或哪些)轴求和,就把 shape的哪个(或哪些)数字消掉并得到 最终的shape
如shape[2,5,4]按:
axis=1求和:得到 shape[2,4]
axis=2求和:得到shape[2,5]
如shape[2,5,4]按:
axis=0和2求和:得到shape[5]
axis=1和2求和:得到shape[2]
当使用keepdims=true时,按哪个或哪些轴求和,就把对应的shape变为1(右边蓝字)
如shape[2,5,4]按:
axis=1求和:得到shape[2,1,4]
axis=1和2求和:得到shape[2,1,1]

QA
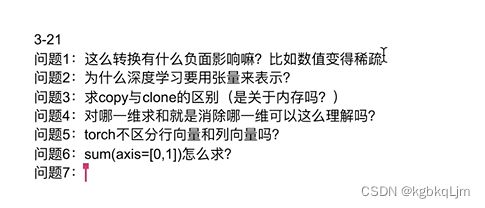
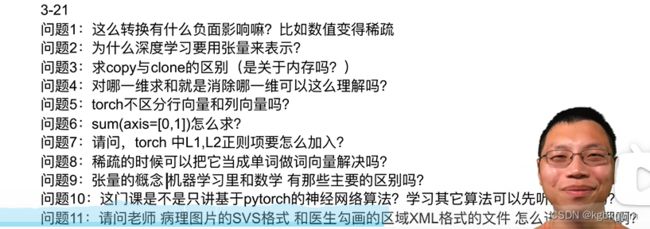
1.如果有很多字符串或特征,基于one-hot把其变成0、1, 那样就有很多列,变得很稀疏
对机器学习来说 ,稀疏矩阵不会有很多影响
2.深度学习、机器学习为什么用tensor
统计学更爱用tensor
3.copy和clone
体会深浅拷贝,clone一定是深拷贝,copy可能是浅拷贝
4.可以
5.torch区分行、列向量吗?
(弹幕)因为向量就是一维的,在计算机里就是一个数组,没有行列之分。想要区分,就要按矩阵来看
个人理解:torch中行列向量都是 一维向量,一维向量不区分行或列(不像线代那样)。
如果必须要区分,可以用 二维数组 中 存放多个一维数组(每个一维数组中只有一个元素)表示列向量
6.自己看下前面的笔记吧
7.后面讲
8.后面讲(词向量?)
9.机器学习中的张量就是多维数组,和数学中的张量不同
10.【重点体会核心思想和概念,工具只是工具】类似于在不同时代用不同工具,如 学车, 几十年前用 自行车,现在用 汽车。
工具只是工具(如python、C++、pytorch)
-
?
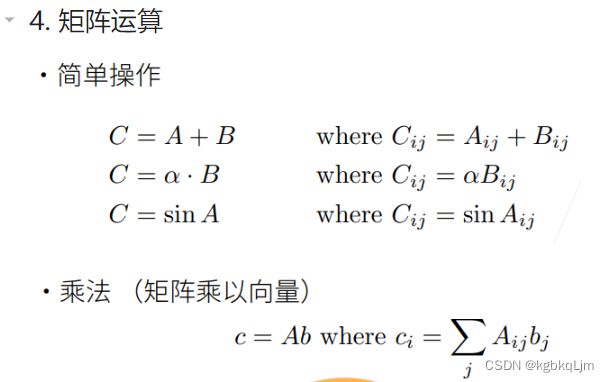
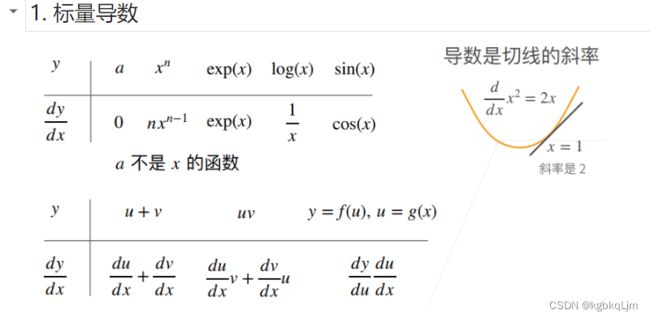
06-矩阵计算
在深度学习中我们很少对向量的函数求导,绝大多数情况下都是对标量求导, 因此之前学的很多 向量、矩阵求导是用不到的
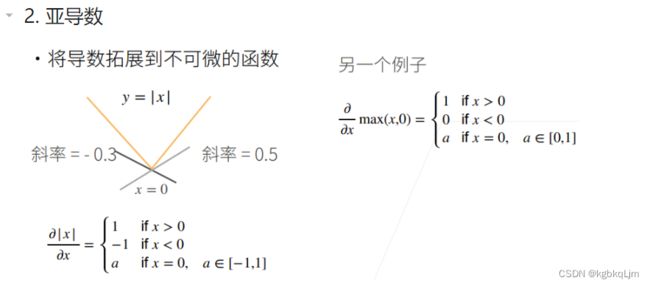
标量导数与亚导数
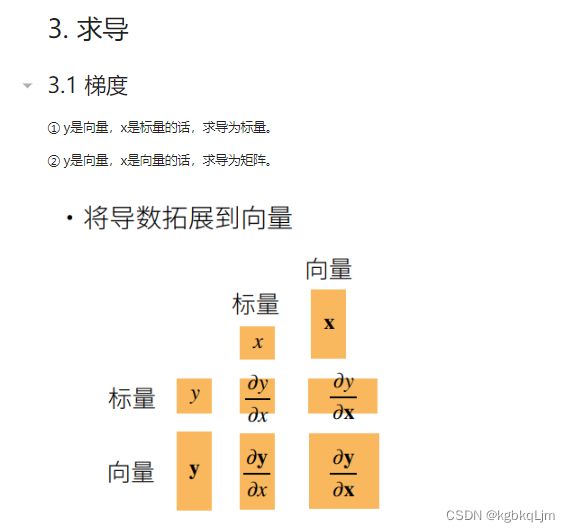
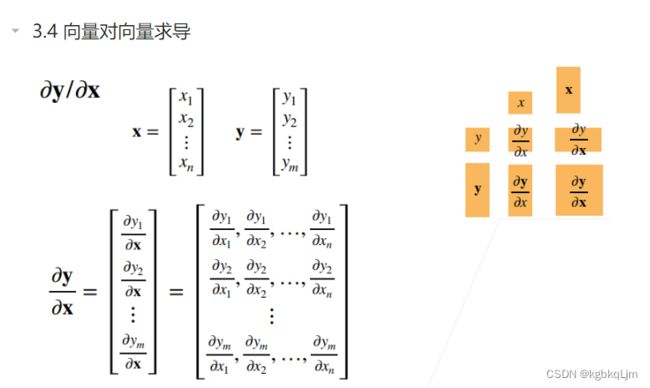
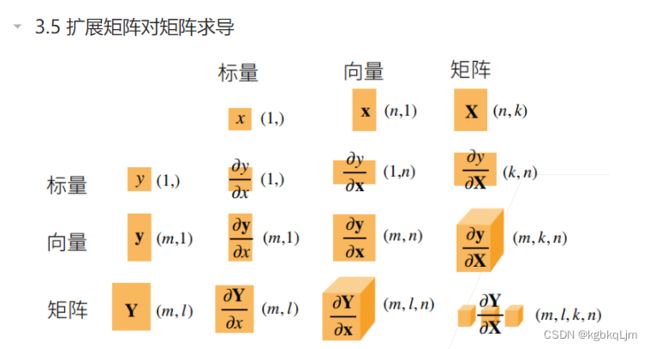
向量与标量的求导(重点是搞对形状)
要搞清形状:
对于y=f(x)
y标x标时,求导是标(如上节)
y向x标,求导是向量
y标x向时,求导是向量
y向x向,求导是矩阵
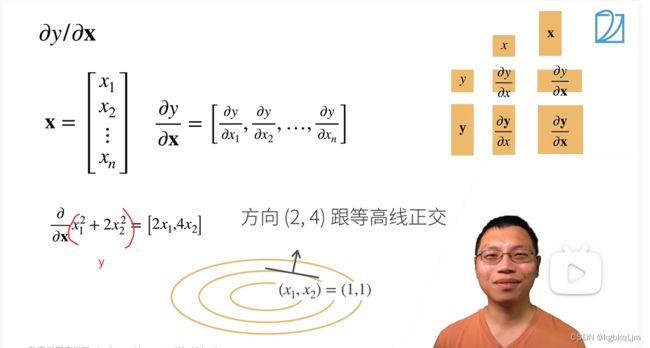
标量y对向量x求导
弹幕说:别猜了 这里的差异是分子布局和分母布局的原因 结果遵循分子布局就是行向量 遵循分母布局就是列向量
举例:
x是一个长为2的向量,y定义为 第一个元素平方+2第二个元素的平方
下图画的椭圆就是 y=x1的平方+2x2的平方
梯度和等高线是正交的(即**【梯度指向的是值变化最大的方向】**)
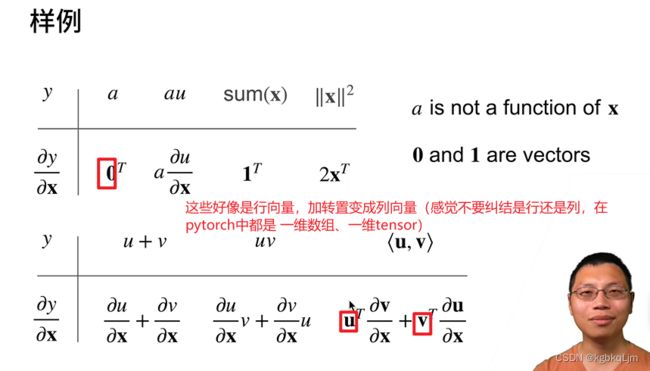
0T:全0行向量 (感觉 加粗0相当于列向量,转置变成行向量)
弹幕说:L2 norm的平方,平方后根号没了,变成各项x的平方和,然后对x进行求导,每一行就是2xi,然后就是原来列向量x的转置的2倍
向量对标量求导(分子/分母布局)
列(或行)向量对于标量的导数还是列(或行)向量
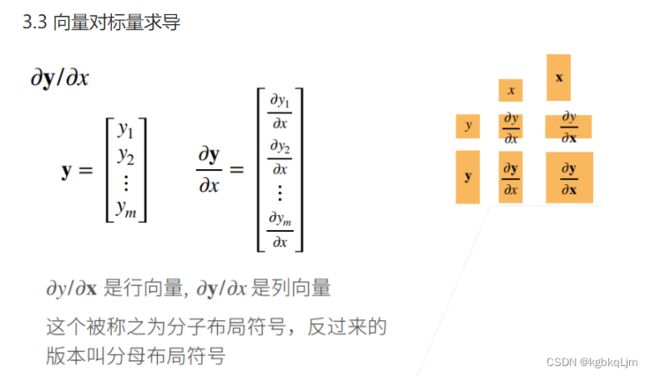
向量y对向量x求导
如x、y都是列向量时
下图中0是全0矩阵,I是单位矩阵,A是和x无关的矩阵

矩阵对矩阵求导
QA(接上节)
NP:Non-Polynomial
14.如果是凸函数能拿到最优, 如果非凸函数 在实际计算中几乎拿不到最优解(纯数学理论或许可能)
07-自动求导
向量链式法则
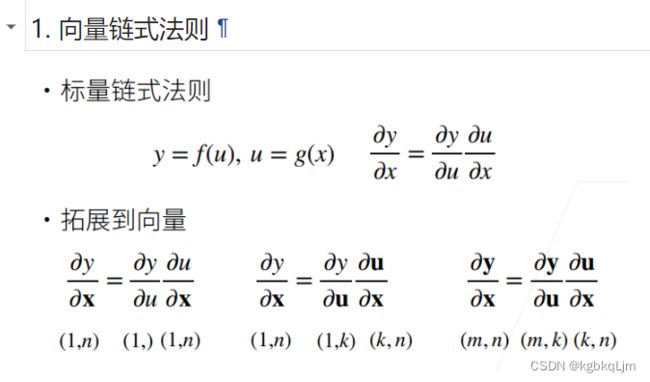
因为
矩阵的例子:
X:mxn的矩阵,w:向量

自动求导
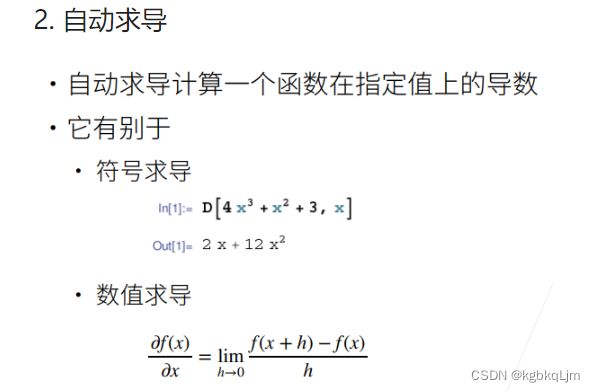
计算图(原理)
计算图等价于上节我们用 链式法则求导的过程,是一个无环图
操作子:一步一步操作
每个圈表示一个输入、一个操作
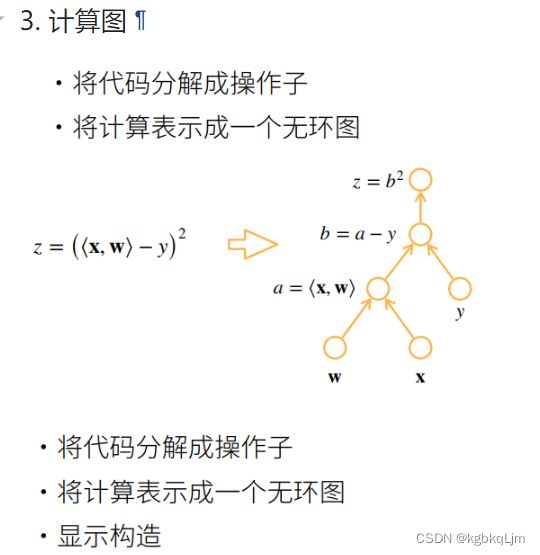
tf和mxnet都可以显式构造计算图(如下图上面,直接定义出来公式)

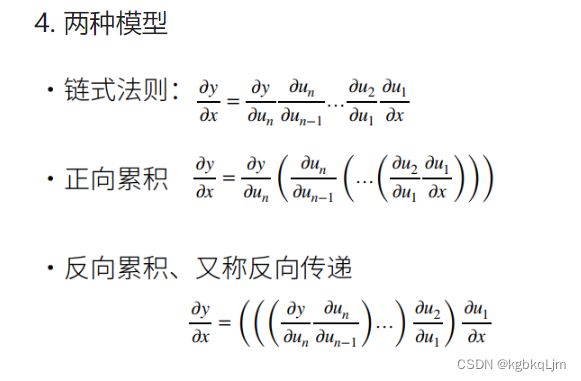
基于计算图的两种自动求导方式
这里是概述原理,应用的时候底层都做好了,不需要自己实现自动求导
【两种方式】正向计算(正向累积)、反向计算(反向累计、即 AI中的反向传播back propagation)(即 如下图, 括号的计算优先级就展示了 计算的方向)

正向上节讲了


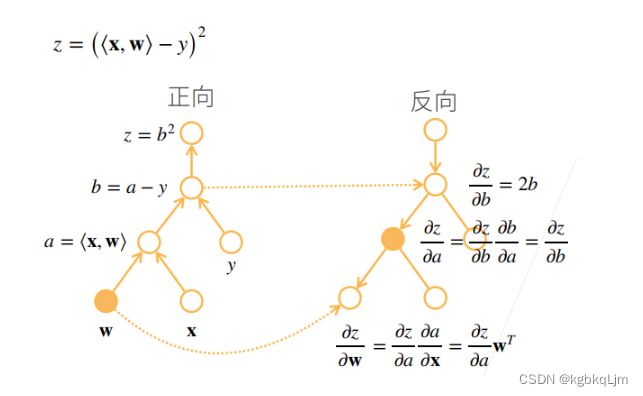
反向累积总结、复杂度
前向计算时,存储所有的中间值,反向时直接用中间结果

正向forward和反向backward的计算复杂度差不多。
但 反向复杂度的内存复杂度是On(深度神经网络很耗GPU资源)
正向累积 内存复杂度O1(因为无论网络多深,都不需要存中间计算结果。但 当需要计算一个变量的梯度时需要将 整个网络都计算一遍,效率太低)

【代码】自动求导
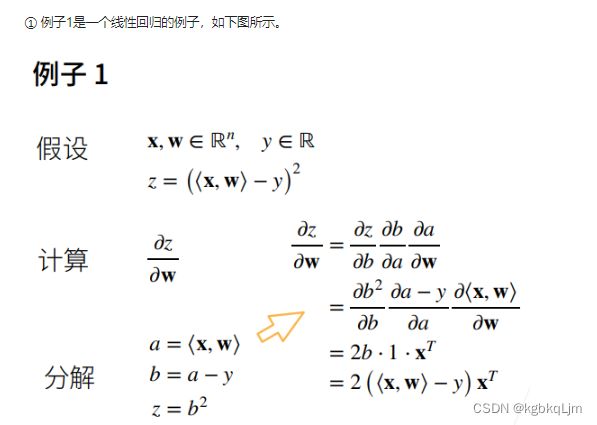
【例子1】
x.requires_grad_(True) # 等价于 x = torch.arange(4.0,requires_grad=True)。告诉我们要存储梯度,这样后续就可以直接基于x.grad访问梯度了
![]()
内积:
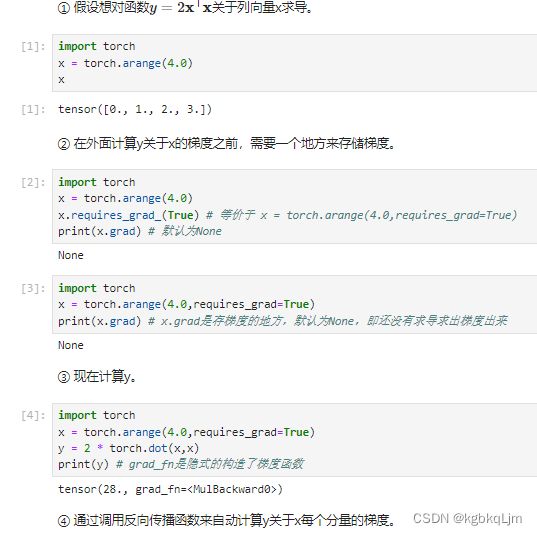
上图中28=2*(0x0+1x1+2x2+3x3)
通过调用反向传播函数来自动计算y关于x每个分量的梯度
利用backward()计算所有梯度,会自动累积到.grad属性中
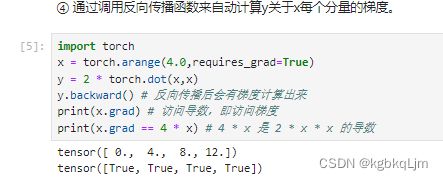
上图中x = [0. , 1., 2., 3. ],则 对于 y=2*xT和x的内积 的 x的梯度(即导数)为 [4x0, 4x1, 4x2, 4x3]
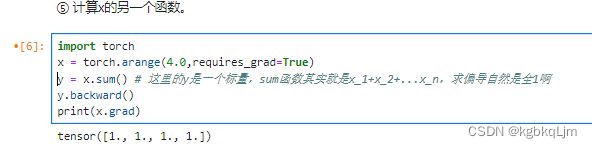
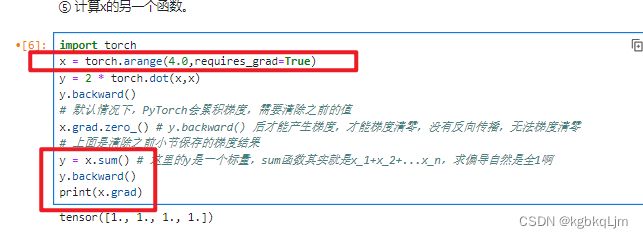
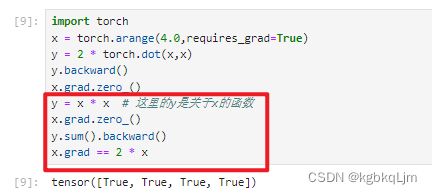
【例子2】下面计算 x的另一个函数(y=x.sum()):
默认情况下,PyTorch会累积梯度,因此在计算另一个函数时 需要清除之前的梯度值
pytorch中_表示重写这个变量,如 x.grad.zero_()重写梯度grad(即把梯度清0)
理论上求向量的sum的梯度:SUM函数其实就是x_1+x_2+…x_n,求偏导自然是全1啊
【例子3】如 y=x*x假设y和x都是向量时,理论上y是一个矩阵,但是在深度学习中我们很少对向量的函数求导,绝大多数情况下都是对标量求导,因此 实际上我们会 对y.sum(这就是个标量了)求导 而不是直接对y求导(不求和直接算梯度结果是一个矩阵,就越来越复杂了), 因此之前学的很多 向量、矩阵求导是用不到的
注:这里的*是哈达玛积(那不就是 向量或矩阵按元素计算吗)
x = [0. , 1., 2., 3. ],则 对于 y=x *x的.sum() 为 x1 ^ 2+x2^ 2+x3^ 2…+xn^n,导数即 2x1+2x2+2x3+…+2xn
则 x的梯度(即导数)为 [0., 2.,4.,6.]

【例子4】将某些计算移动到记录的计算图之外。
【意义】对于后续网络中,需要固定其中部分参数时,很有用
detach:拆卸 脱离
u = y.detach() # y.detach把y当作一个常数,而不是关于x的一个函数,并声明为u,即u是一个常数,值为xx,而不是一个关于x的变量(y此时仍然是 x的函数)
则z就是 一个常数u变量x,导数即为常数u

【例5】
⑧ 即使构建函数的计算图需要通过Python控制流(例如,条件、循环或任意函数调用),仍然可以计算得到的变量的梯度。
如下例中, 返回值都是根据 输入的值指定的,即每次算b时候,torch会把计算图在背后存起来
norm函数是用于计算向量的范数,也就是向量的长度
norm()是求欧几里得范数,欧几里得范数指得就是通常意义上的距离范数。例如在欧式空间里,它表示两点间的距离(向量x的模长)。
f(a)是a的分段线性函数,则d=f(a)=ka,梯度就是k,k=d/a

QA

17.python实现和数学实现是不同的
18.需要。
19.设计上的理念。
对一个比较大的批量 一次算不完,就 切成几份,然后累加起来 最后发出去。
21.对于向量求导 ,会越算越复杂, 如变成矩阵甚至更复杂的
24.是的
25.因为backward不会自动计算, 只有当你需要计算梯度时,显式写出backward才会计算。
因为 计算梯度的时间和空间成本很大
27.可以,即高阶求导