多场景建模:阿里MARIA
Multi-scenario ranking framework with adaptmulti-scenario ranking framework with adaptive feature learning
背景
多模态搜索场景支持用户通过不同模态的Query来表达多样的搜索需求。
- 拍照搜索(Visual Search):实拍图作为query
- 相似商品搜索(Similar Search):商品作为query
- 发生在外部媒体的兴趣搜索(Interest Search)商品作为query
问题&动机
多场景建模的主要问题是建模场景之间的共性及差异性,现有解决方案都是专注网络上层优化,认为底层Embedding是共享、一致的,但在实际场景中无法很好提取场景之间的差异。

解决方案
聚焦底层特征表示,提出自适应特征学习的多场景排序框架 MARIA Multi-scenario ranking framework with adaptmulti-scenario ranking framework with adaptive feature learning
引入Feature Scaling(FS)根据场景来缩放特征,放大重要特征,缩小不重要特征(类似SeNet)
引入Feature Refinement(FR)每个特征域设置一组特征微调器(Refiner),然后基于场景感知的gate网络(Selector)来进行选择 (类似于MoE)
引入Feature Correlation Modeling(FCM)对每个特征域进行显示交叉(类似PNN)

方案详情
将序列特征、用户特征、物品特征、trigger特征、context特征Embedding拼接起来,作为底层的共享特征Embedding,常规操作
Q = [ h b ∣ ∣ u ∣ ∣ x i ∣ ∣ t ∣ ∣ c ] \mathbf Q = [\mathbf h_b || \mathbf u || \mathbf x_i || \mathbf t || \mathbf c] Q=[hb∣∣u∣∣xi∣∣t∣∣c]
这里用户特征 u \mathbf u u由用户ID Embedding及用户其他属性的Embedding拼接得到
用户属性集合 A u = { a u 1 , . . . , a u L } \mathcal{A_u} = \{a_u^1, ..., a_u^L\} Au={au1,...,auL}
u = [ e u ∣ ∣ a u 1 ∣ ∣ . . . ∣ ∣ a u L ] \mathbf u = [\mathbf e_u || \mathbf a_u^1 || ... || \mathbf a_u^L] u=[eu∣∣au1∣∣...∣∣auL]
这里物品特征 i \mathbf i i由物品ID Embedding及物品其他属性的Embedding拼接得到
用户属性集合 A i = { a i 1 , . . . , a i P } \mathcal{A_i} = \{a_i^1, ..., a_i^P\} Ai={ai1,...,aiP}
u = [ e i ∣ ∣ a i 1 ∣ ∣ . . . ∣ ∣ a i P ] \mathbf u = [\mathbf e_i || \mathbf a_i^1 || ... || \mathbf a_i^P] u=[ei∣∣ai1∣∣...∣∣aiP]
context特征集合 A c = { a c 1 , . . . , a c N c } \mathcal{A_c} = \{a_c^1, ..., a_c^{N_c}\} Ac={ac1,...,acNc}
trigger特征(因为是搜索场景,所有有个query,但是是多模态的,不同场景的query不一样,论文中可能是图片、文字等类型,这种query称为trigger)
trigger集合 A t = { a t 1 , . . . , a t O } \mathcal{A_t} = \{a_t^1, ..., a_t^O\} At={at1,...,atO}
t = [ a t 1 ∣ ∣ . . . ∣ ∣ a t P ] \mathbf t = [\mathbf a_t^1 || ... || \mathbf a_t^P] t=[at1∣∣...∣∣atP]
序列特征的Embedding矩阵 B u = { s e q 1 , s e q 2 , . . . , s e q m } \mathbf B_u = \{\mathbf seq_1,\mathbf seq_2, ..., \mathbf seq_m\} Bu={seq1,seq2,...,seqm}
经过target attention之后,得到
H u = { h 1 , h 2 , . . . , h m } \mathbf H_u = \{\mathbf h_1, \mathbf h_2, ... , \mathbf h_m\} Hu={h1,h2,...,hm}
h i = ∑ j = 1 m a j h j \mathbf h_i = \sum_{j=1}^m a_j \mathbf h_j hi=∑j=1majhj
attention分数 a i a_i ai计算如下
a i = e x p ( s i m ( t , h i ) ) ∑ j = 1 m e x p ( t , h j ) a_i = \frac {exp(sim(\mathbf t , \mathbf h_i))} { \sum_{j=1}^m exp(\mathbf t, \mathbf h_j)} ai=∑j=1mexp(t,hj)exp(sim(t,hi))
最终拼接起来得到底层的Embedding
Q = [ h ∣ ∣ u ∣ ∣ i ∣ ∣ t ∣ ∣ c ] \mathbf Q = [\mathbf h || \mathbf u || \mathbf i || \mathbf t || \mathbf c] Q=[h∣∣u∣∣i∣∣t∣∣c]
Feature Scaling
其实就是将用户id、物品id、场景id三者的Embedding以及底层Embedding作为输入,经过FCN后sigmoid得到特征的重要度,但是这个FCN的梯度不对底层Embedding做后向传播,避免梯度冲突
特征重要度
α = λ ∗ S i g m o i d ( F C N ( f r e e z e ( Q ) ∣ ∣ e u ∣ ∣ e i ∣ ∣ e s ) ) \mathbf \alpha = \lambda * Sigmoid( \mathrm{FCN}(\mathrm{freeze}(\mathbf Q) || \mathbf e_u || \mathbf e_i || \mathbf e_s) ) α=λ∗Sigmoid(FCN(freeze(Q)∣∣eu∣∣ei∣∣es))
重要度乘到底层Embedding上面
Q S = [ Q 1 α 1 , . . . , Q N Q α N Q ] \mathbf Q_S = [Q_1 \alpha_1, ..., Q_{N_Q} \alpha_{N_Q}] QS=[Q1α1,...,QNQαNQ]
= [ h ^ , u ^ , i ^ , t ^ , c ^ ] [ \mathbf {\hat h}, \mathbf {\hat u}, \mathbf {\hat i}, \mathbf {\hat t}, \mathbf {\hat c}] [h^,u^,i^,t^,c^]
Feature Refinement
特征微调模块,将场景特征和各个特征域特征拼接起来作为输入,经过FCN,输出各个特征微调器(Refiner)的权重,每个特征域有一组Refiner(就是个FCN),每个Refiner其实就是MMoE里面的expert,对特征域进行学习
以序列特征域为例,序列特征域Embedding为 h ^ \mathbf {\hat h} h^,场景ID的Embedding为 e s \mathbf e_s es
β = S o f t m a x ( S i g m o i d ( F C N [ h ^ ∣ ∣ e s ] ) \mathbf \beta = \mathrm{Softmax}(\mathrm{Sigmoid}(\mathrm{FCN}[\mathbf {\hat h} || \mathbf e_s]) β=Softmax(Sigmoid(FCN[h^∣∣es])
假设序列特征域有 k k k个Refiner,那么经过FR后序列特征为
h ~ = [ β 1 F C N 1 ( h ^ ) ∣ ∣ . . . ∣ ∣ β k F C N k ( h ^ ) ] \mathbf {\widetilde h} = [\mathbf {\beta_1} \mathrm {FCN_1} (\mathbf {\hat h}) || ... || \mathbf {\beta_k} \mathrm {FCN_k} ( \mathbf {\hat h})] h =[β1FCN1(h^)∣∣...∣∣βkFCNk(h^)]
其他特征同理
最后得到的Embedding拼接到一起
Q R = [ h ~ ∣ ∣ u ~ ∣ ∣ i ~ ∣ ∣ t ~ ∣ ∣ c ~ ] \mathbf {Q_R} = [ \ \ \mathbf {\widetilde h} \ \ || \ \ \mathbf {\widetilde u} \ \ || \ \ \mathbf {\widetilde i} \ \ || \ \ \mathbf {\widetilde t} \ \ || \ \ \mathbf {\widetilde c} \ \ ] QR=[ h ∣∣ u ∣∣ i ∣∣ t ∣∣ c ]
Feature Correlation Modeling
这个就是处理各个特征域的交叉的,将 h ~ \mathbf {\widetilde h} h 、 u ~ \mathbf {\widetilde u} u 、 i ~ \mathbf {\widetilde i} i 、 t ~ \mathbf {\widetilde t} t 、 c ~ \mathbf {\widetilde c} c 映射成相同的维度
得到 h ‾ \mathbf {\overline h} h、 u ‾ \mathbf {\overline u} u、 i ‾ \mathbf {\overline i} i、 t ‾ \mathbf {\overline t} t、 c ‾ \mathbf {\overline c} c
然后两两点积交叉
Q C = [ h ‾ ⋅ u ‾ ∣ ∣ . . . ∣ ∣ t ‾ ⋅ c ‾ ] \mathbf {Q_C} = [ \ \mathbf {\overline h} \cdot \mathbf {\overline u} \ \ || ... || \ \ \mathbf {\overline t} \cdot \mathbf {\overline c} \ \ ] QC=[ h⋅u ∣∣...∣∣ t⋅c ]
经过Feature Refinement和Feature Correlation Modeling后的embedding拼接起来得到最终的输入embedding
Q f = [ Q R ∣ ∣ Q C ] \mathbf Q_f = [\mathbf Q_R || \mathbf Q_C] Qf=[QR∣∣QC]
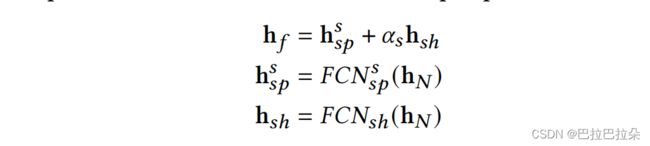
然后后面的结构就和MMoE类似,每个场景按不同权重选择专家的输出,同时这里有个共享的场景,
最终用于预测的Embedding由各个场景塔的embedding和共享场景塔输出的embedding加权求和,共享场景塔的权重应该设置较小,防止场景不相关的冲突



实验
Visual Search (VS)
Similar Search (SS)
Interest Search (IS)

消融分析
各个组件都有作用
Feature Scaling (FS)
Feature Refinement (FR)
Feature Correlation Modeling module (FCM)
Network Layer (NL)
the shared tower (ST) in the prediction layer
Gumbel Softmax (GS)
