2020李宏毅学习笔记——11.Unsupervised Learning: Linear Methods(无监督学习)
文章目录
- 摘要
- 1. Introduction(介绍)
- 2.Clustering(聚类)
-
- 2.1 K-means
- 2.2 HAC
- 3. Dimension Reduction(降维)
-
- 3.1 How to do Dimension Reduction?
- 3.2 PCA算法(Principle component analysis)
-
- 3.2.1 基于最大方差原理
-
- 1 . PCA for 1-D
- 2. PCA for n-D
- 3.2.2 基于最小化误差原理
- 3.2.3 从NN角度理解PCA
- 3.2.4 Weakness of PCA
- 3.2.5 PCA for Pokemon(将PCA用于分析宝可梦的数据)
- 3.2.6 PCA for MNIST
- 3.2.7 PCA和NMF比较
- 总结与展望
摘要
本章首先介绍了什么是无监督学习及无监督学习的类别,主要分类两种,一种是化繁为简型,如聚类复杂的input输入,简单的output输出,另一种是无中生有型,没有input x只有output y。接着,讲解了具有的聚类算法,常用方法有K-means和HAC,K-means主要思想是更新中心点来聚类,而HAC的思想是通过build a tree和选取阈值来实现的。其次通过聚类的不足,引入Dimension Reduction(降维)并详细展开 ,可以简单使用Feature Selection(特征选择)但是有的不能简单使用Feature Selection的方法,引入更好一点的方式,PCA(主成分分析法),详细讲解了PCA的原理与数学推导,以及PCA的应用。
1. Introduction(介绍)
无监督学习可以分为两大类:

第一类:化繁为简
- 聚类(Clustering)
- 降维(Dimension Reduction)
第二类:无中生有(Generation)
对于无监督学习(Unsupervised Learning)来说,我们通常只会拥有(x,y^)中的x或者y,其中:
化繁为简:把复杂的input变成比较简单的output,比如把一大堆没有打上label的树图片转变为一棵抽象的树,此时training data只有input x,而没有output y^。
无中生有:就是随机给function一个数字,它就会生成不同的图像,此时training data没有input x ,而只有output y^。
2.Clustering(聚类)
聚类,顾名思义,就是把相近的样本划分为同一类,比如对下面这些没有标签的image进行分类,手动打上cluster 1、cluster 2、cluster 3的标签,这个分类过程就是化繁为简的过程。
那我们怎么去确定分几个cluster呢 ?(通常是emperical 以实验为根据的)
聚类中最常用的方法有:
(1)k-means:a.随机初始化k个类的中心点;b.每个样本以最靠近的中心点的所属类为类标签;c.根据新得到的分类更新中心点;d.重复步骤b、c,直到模型收敛。
(2)Hierarchical Agglomeratiive clustering (HAC)层次聚类方法:根据样本之间的两两相似程度来建立一颗树;
2.1 K-means
该方法的大致过程如下:
a: 现有一大堆的unlabeled data {x1,x2,…,xn},我们要把它划分为K个cluster
b: initial的时候可以从training data里随机挑K个object xn 出来作为K个center ci的初始值
c: 遍历所有的object xn ,并判断它属于哪一个cluster,如果xn与第i个cluster的center ci最接近,那它就属于该cluster
d:更新center:把每个cluster里的所有object取平均值作为新的center值
e:重复从c,d步骤,直到收敛

K-Means 算法思想较为简单如下所示:
1.选择K个点作为初始质心
2. repeat
将每个点指派到最近的质心,形成K个簇
重新计算每个簇的质心
3. until 簇不发生变化或达到最大迭代次数
2.2 HAC
假设现在我们有5个样本点,想要做clustering:
step 1:build a tree
整个过程类似建立Huffman Tree,只不过Huffman是依据词频,而HAC是依据相似度建树:
- 对5个样本点两两计算相似度,挑出最相似的一对,假设样本点1和2最相似
- 将样本点1和2进行merge (可以对两个vector取平均),生成代表这两个样本点的新结点
- 此时只剩下4个结点,再重复上述步骤进行样本点的合并,直到只剩下一个root结点
step 2: pick a threshold
选取阈值,形象来说就是在构造好的tree上横着切一刀,相连的叶结点属于同一个cluster

上图中绿色的切割线,则可分为途中四类cluster。不同颜色的横线和叶结点上不同颜色的方框对应着切法与cluster的分法。
HAC和K-means最大的区别在于如何决定cluster的数量,在K-means里,K的值是要你直接决定的;而在HAC里,你并不需要直接决定分多少cluster,而是去决定这一刀切在树的哪里。
3. Dimension Reduction(降维)
clustering的缺点是以偏概全,它强迫每个object都要属于某个cluster,但实际上某个object可能拥有多种属性,或者多个cluster的特征,如果把它强制归为某个cluster,就会失去很多信息。所以我们应该用一个vector来描述该object,这个vector的每一维都代表object的某种属性。

如果将这种高维的vector(比如图像)转化成低维的vector,就叫做Dimension Reduction(降维)。
从另一个角度来看为什么Dimension Reduction可能是有用的!
左边是data以螺旋状分布在3维空间里。但其实如右边的样子,以2维的空间就可以描述这些信息,这样就把简化了问题。

再举一个具体的例子:
如果以MNIST(手写数字集)为例,每一张image都是 28 ∗ 28 28*28 28∗28的dimension,但我们反过来想,大多数 28 ∗ 28 28*28 28∗28 dimension的vector转成image,看起来都不会像是一个数字,所以描述数字所需要的dimension可能远比28*28要来得少。
举一个极端的例子,下面这几张表示“3”的image,我们完全可以用中间这张image旋转角度来描述,也就是说,我们只需要用这一个dimension就可以描述原先28*28 dimension的图像。

上例中只要抓住角度的变化就可以知道28维空间中的变化,这里的28维pixel就是之前提到的樊一翁的胡子,而1维的角度则是他的头,也就是去芜存菁,化繁为简的思想。
3.1 How to do Dimension Reduction?
在Dimension Reduction里,我们要找一个function,这个function的input是原始的x,output是经过降维之后的z。

做dimension reduction常用的方法是
- Feature selection(拿掉一些直观上就对结果没有影响的dimension)
- Principle component analysis(PCA)(主要成分分析)
3.2 PCA算法(Principle component analysis)
PCA认为降维就是一个很简单的linear function,它的input x和output z之间是linear transform,即z=Wx,PCA要做的,就是根据一大堆的x把W给找出来(现在还不知道z长什么样子)。
3.2.1 基于最大方差原理
1 . PCA for 1-D
为了简化问题,这里我们假设z是1维的vector,也就是把x投影到一维空间,此时w是一个row vector(行向量),z1=w1x,其中w1表示w的第一个row vector,假设w1的长度为1,此时z1就是x在w1方向上的投影。
那应该怎么去选w呢?
我们希望选这样一个w1,它使得x经过投影之后得到的z1分布越大越好,也就是说,经过这个投影后,不同样本点之间的区别,应该仍然是可以被看得出来的,即:
- 我们希望找一个投影的方向,它可以让投影后的variance越大越好
- 我们不希望投影使这些data point通通挤在一起,导致点与点之间的奇异度消失

上图中给出了所有样本点在两个不同的方向上投影之后的variance比较情况,要选择让样本在所投影到的维度上的方差尽量大。
2. PCA for n-D
投影到更高维的空间,对z=Wx来说:
- z1=w1x,表示x在w1方向上的投影
- z2=w2x,表示x在w2方向上的投影
- 同上

上图中 z1,z2,…串起来就得到z,而w1,w2分别是的第1,2,…个row,需要注意的是,此时W是一个单位正交矩阵,即(w1,w2,w3,…)相互正交,且都是单位向量。
那我们怎么去找w1,w2 呢?怎么解决这个问题?
数学公式推导
第一点:先来求解w1,把投影后z=w1·x的协方差矩阵写出来~

第二点:问题变成了求解带条件的最大值问题,采用拉格朗日乘数法求解~,可求得w1是x的协方差矩阵S的特征向量,且是最大特征值对应的特征向量。(线代矩阵运算)

第三点:依次往后退,w2是S的第二大特征值所对应的特征向量。

第四点:PCA达到的效果就是decorrelation(去关联),所以最后投影之后得到z的协方差矩阵D是对角矩阵。
- 投影矩阵W是单位正交矩阵
- W就是由x协方差矩阵S的特征向量组成

3.2.2 基于最小化误差原理
假设我们现在考虑的是手写数字识别,这些数字是由一些类似于笔画的basic component组成的,本质上就是一个vector,记做u1,u2,…,以MNIST为例,不同的笔画都是一个28×28的vector,把某几个vector加起来,就组成了一个28×28的digit
写成表达式就是:![]()
其中x代表某张digit image中的pixel,它等于k个component的加权和加上所有image的平均值。
比如7就是x=u1+u3+u5,我们可以用来[ c1 c2 c3 … ck]T 表示一张digit image,如果component的数目k远比pixel的数目要小,那这个描述就是比较有效的。

实际上我们并不知道u1~uk具体的值,因此我们要找这样k个vector,使得![]() 之间越接近越好。
之间越接近越好。
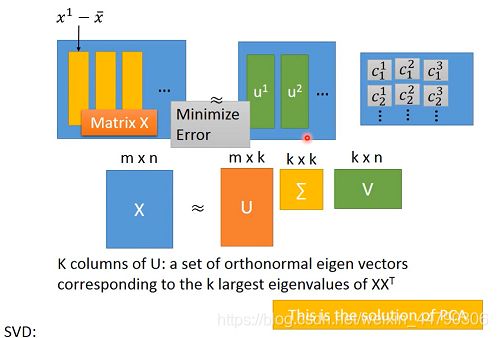
- 基本思想:将x^近似看成是由多个u组成的,然后求解最小化它们之间的error时的系数c和分量u。

- 矩阵形式,Matrix X就是x^,用下图中的矩阵相乘来表示,我们的目标是使等号两侧矩阵之间的差距越小越好。

- 为了求解c和u(component),可以将X做奇异值分解SVD,用分解后的U代替u,ΣxV代替系数c,得到的U矩阵就是协方差矩阵XXT的k个特征向量。
3.2.3 从NN角度理解PCA
由于w之间时互相正交的,CK,也就是说c可以表示成(下图中)这两者的乘。PCA相当于只含一层hidden layer的AutoEncode,即具有一层隐含层的神经网络(线性激活函数),即输入和输出之间的误差越小越好。
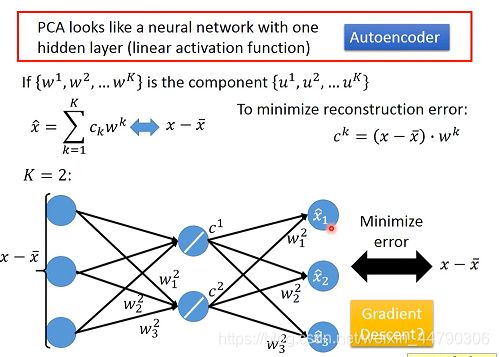
如果不是PCA的方法,只用neural network的解法不能够保证w之间是垂直的。但是如果用网络的话,可以用deep autoencode。(下一节会讲到)
3.2.4 Weakness of PCA
PCA有很明显的弱点:
- PCA是无监督的,不知道数据的标签,这样在降维映射之后可能会把两类数据混到一起。(考虑数据标签的方法LDA(Linear Discriminant Analysis)可以避免这一问题,但这属于监督学习)。
- PCA是线性的,把一个三维空间中的S形分布的数据做PCA之后的效果,就是把S形拍扁,而非展开。(对类似曲面空间的降维投影,需要用到non-linear transformation)

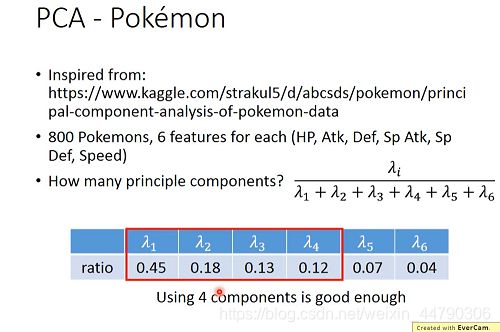
3.2.5 PCA for Pokemon(将PCA用于分析宝可梦的数据)
案例中800个宝可梦的cov(x)是6维,最多可以投影到6维空间,我们可以先找出6个特征向量和对应的特征值λi,其中λi表示第i个投影维度的variance有多大,计算6个特征值的ratio比重,舍去较小的(只取前四个特征值的特征向量作为新的特征,或者叫主成分PC)。(即特征值的意义是,PCA降维时,在相应维度的variance有多大。)
注意到新的维度本质上就是旧的维度的加权矢量和,下图给出了前4个维度的加权情况,从PC1到PC4这4个principle component都是6维度加权的vector,它们都可以被认为是某种组件,大多数的宝可梦都可以由这4种组件拼接而成,也就是用这4个6维的vector做linear combination的结果。
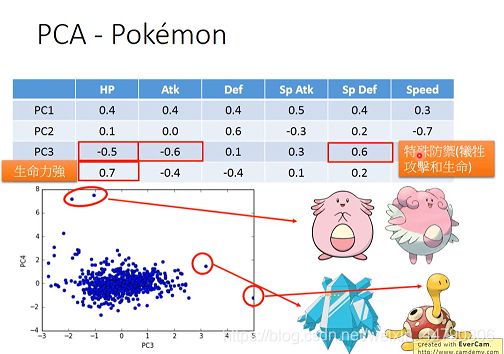
每个PC都是一个六维向量,分析它们在哪个维度是大的正值/负值,可以分析出这个PC所代表的意义。
3.2.6 PCA for MNIST
这个时候我们就可以熟练地把一张数字图像用多个组件(维度)表示出来了:
digit image = a1w1 + a2w2 + …,这里的wi就表示降维后的其中一个维度,同时也是一个组件,它是由原先28×28维进行加权求和的结果,因此wi也是一张28×28的图像,下图列出了通过PCA得到的前30个组件的形状:
在对MNIST和Face的PCA结果展示的时候,你可能会注意到我们找到的组件好像并不算是组件,比如MNIST找到的几乎是完整的数字雏形,而Face找到的也几乎是完整的人脸雏形,仔细思考了PCA的特性,就会发现得到这个结果是可能的,注意到linear combination的weight ai 可以是正的也可以是负的,因此我们可以通过把组件进行相加或相减来获得目标图像,这会导致你找出来的component不是基础的组件,但是通过这些组件的加加减减肯定可以获得基础的组件元素。
3.2.7 PCA和NMF比较
NMF:Non-negative Matrix Factorization,非负矩阵分解(这一节未细讲)
- NMF分解之后的component的系数都是正的,就拿image来说,也就是说分解之后的component像是原始image的一部分。
- PCA的系数可正可负,涉及到component的“加加减减”,而不是部分。
总结与展望
本章学习到了,无监督学习的种类,化繁为简型,包括聚类与降维,学习到了具体的聚类算法,K-means和HAC。HAC和K-means最大的区别在于如何决定cluster的数量,在K-means里,K的值是要你直接决定的;而在HAC里,你并不需要直接决定分多少cluster,而是去决定这一刀切在树的哪里。clustering的缺点是以偏概全,它强迫每个object都要属于某个cluster,我们应该用一个vector来描述该object,这个vector的每一维都代表object的某种属性,但有时候我们仅需要少量维度就可以表示是一个object。所以我们需要Dimension Reduction,我们可以使用feature selection和PCA等进行降维。其中PCA的应用更加广泛,但是PCA也有一些无法避免的缺陷。PCA与NMF有怎么样的区别与性能表现(自己去查阅补充)。下一节将会讲解降维算法(Dimension Reduction)的典型应用——词嵌入(word embedding),以及如何用vector来表示一个word等,及相关应用。