ROS笔记二:launch
目录
launch
node标签
参数
参数服务器
节点分组
launch
launch文件是一种可以可实现多节点启动和参数配置的xml文件,launch文件用于启动和配置ROS节点、参数和其他相关组件。launch文件通常使用XML格式编写,其主要目的是方便地启动ROS节点和设置节点之间的连接关系。
launch常用标签:
标签:launch文件的根标签,表示这是一个launch文件。
标签:用于启动ROS节点。例如,表示启动名为my_node的ROS节点,该节点属于my_package软件包,并且节点的名称为node_name,output="screen"表示将节点输出重定向到屏幕。
标签:用于定义参数,可以在启动launch文件时传递给节点。例如,定义了一个名为my_arg的参数,并设置了默认值为default_value。
标签:用于设置ROS参数。例如,表示设置一个名为my_param的整数类型参数,其值为42。
标签:用于包含其他launch文件。这使得launch文件可以模块化并重用。例如,表示包含了my_package软件包中的other_launch_file.launch文件。或者
标签:用于将一组节点放入一个组中。例如,可以使用来指定一个命名空间,并且其中的所有节点都将位于这个命名空间下。...

node标签
ROS程序运行单位是是node即节点,运行单个node的指令是rosrun
rosrun 是 ROS 中用于直接运行已编译的节点程序的命令。使用 rosrun 命令可以方便地启动指定软件包中的节点,而无需指定软件包的路径。
语法为:rosrun
:指定要运行节点所属的软件包名称。:指定要运行的节点的名称要运行一个名为
my_node的节点,它属于my_package软件包:rosrun my_package my_node
rosrun命令会自动查找指定软件包,并在该软件包的目录下寻找对应的节点可执行文件并运行。使用
rosrun命令相对于直接使用可执行文件路径的好处是,它会自动设置 ROS 环境变量和节点名称空间,并提供了更方便的方式来启动节点。此外,rosrun命令还支持其他选项和参数,可以通过运行rosrun --help查看详细信息。
标签的一般结构和常用属性:
pkg: 指定ROS节点所属的软件包名称。type: 指定要启动的ROS节点类型(即可执行文件名)。name: 指定为ROS节点设置的名称。通常用于在ROS图中唯一标识该节点。args: 可选属性,用于传递参数给要启动的ROS节点。参数以空格分隔。output: 可选属性,用于指定如何处理节点的输出信息。常见的选项包括log(将输出信息记录到日志文件)、screen(将输出信息打印到屏幕)等。示例:
这个示例中,
标签会启动my_node节点,该节点属于my_package软件包,节点的名称为my_node,并且节点的输出信息会打印到屏幕上。
参数
,
标签: 标签用于在ROS的launch文件中设置节点参数的数值。通过 标签可以为特定节点设置参数值,这些参数值将会在节点启动时传递给该节点。
例如,可以使用以下方式在launch文件中设置参数值:
例如,可以使用以下方式在launch文件中加载参数文件:
例如,可以使用以下方式定义一个参数并传递给节点:
参数服务器
参数服务器是一个用于存储和检索参数值的全局参数数据库。它允许ROS节点在运行时动态地获取参数值,并且这些参数值可以在节点之间共享和调整。参数服务器为ROS系统提供了一种方便的方法来管理配置参数,使得节点之间可以共享和访问这些参数。
全局性: 参数服务器是全局性的,意味着所有的ROS节点都可以访问参数服务器上的参数值。
动态性: 节点可以在运行时动态地读取和更改参数服务器中的参数值。
命名空间: 参数服务器支持命名空间,因此可以对参数进行组织和分类,使得参数更加清晰和易于管理。
在ROS中,可以使用rosparam命令行工具或者在节点代码中使用ROS参数服务器 API来访问和设置参数服务器中的参数值。例如,可以使用rosparam set命令来设置参数的值,使用rosparam get命令来获取参数的值。
在节点代码中,可以使用ros::param(C++)或rospy.get_param(Python)等函数来访问和修改参数服务器中的参数值。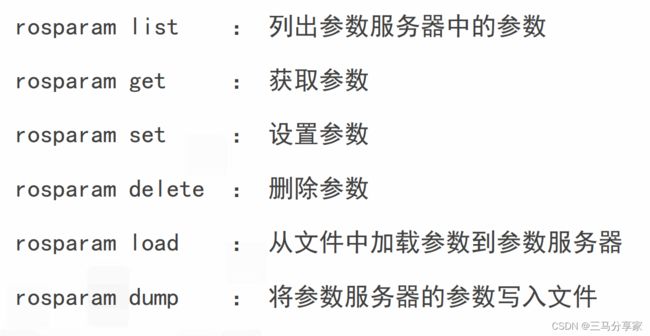
节点分组
节点分组是一种将相关节点组织在一起的方式,以便更好地管理和控制节点的行为。节点分组可以通过ROS的launch文件或者命令行进行设置和配置
通过launch文件进行节点分组:可以使用ROS的launch文件来将相关节点分组到一个launch文件中。在launch文件中,可以使用
e.g.
上述示例中,标签将node1和node2节点组合到一个命名空间为 "my_group" 的分组中。
标签用于创建一个节点分组,其中ns属性定义了这个分组的命名空间。在这个命名空间下启动的节点将会共享这个命名空间,这意味着它们的名称将会被加上这个命名空间前缀。例如,如果在
分组内启动了两个节点,一个叫做node1,另一个叫做node2,它们的完整名称将会是my_group/node1和my_group/node2。
重命名
在ROS中,可以使用
在ROS的launch文件中,
重命名节点的话题:
重命名节点的服务:
from)和目标(to)。这意味着节点内部将使用新的名称来订阅和发布消息,而不是原来的名称
注意: 标签只是在启动时进行动态的重命名,并不会真正修改节点的代码或定义。