第一章:从3D到2D
本文是《从0开始图形学》的第一章内容。讲解如何将3D的模型“画”到2D的图形山。
概念解说
图形学渲染,就是将3D的东西“画”到2D的屏幕上,和拍照的效果是一样的,这也是为什么很多3D渲染引擎会有“相机”这个概念,这一节我们来看一下怎么把3D变成2D。
场景定义
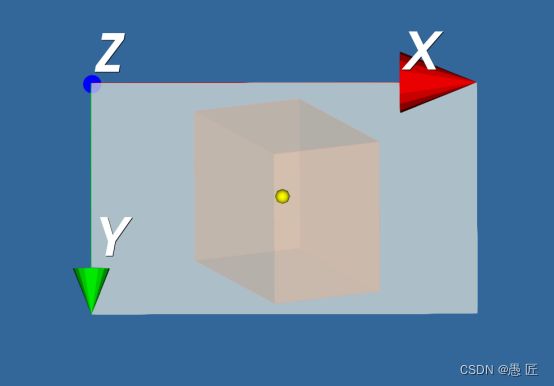
首先,我们定义一个渲染场:一个定义好的坐标系中某个3D的箱子,黄色的球体代表相机,如下图所示

我们的渲染结果就应该同相机视角看到的结果一样,如下图所示,透过半透明的“画布”,可以看到箱子在“画布”上的样子
问题提出
那么,如何实现上面效果呢?我们先从箱子的整体轮廓入手,很简单,只要将箱子的八个顶点坐标的Z轴分量去掉,找到图片上对应的[X,Y]就是对应顶点的渲染位置(图中红色的点),再将点和点之间用线连接起来,也就是箱子的8条边(图中黄色的线)

是不是马上就有点立体感了!那代码上要怎么实现呢,很简单!
C核心代码
首先,定义需要渲染的点,以及这些点的关系索引
// 定义渲染数据
float _points[8][3] = // 点的数据
{
{469.70839522142523, 181.86451044628149, 268.14698315693755}, // x, y, z
{741.60073227608791, 149.05001503297740, 390.61234945175556},
{741.60073227608791, 535.42034601093997, 494.13996576730500},
{469.70839522142523, 568.23484142424411, 371.67459947248699},
{258.39926772391209, 64.579653989059977, 705.86003423269506},
{530.29160477857477, 31.765158575755891, 828.32540052751301},
{530.29160477857477, 418.13548955371851, 931.85301684306251},
{258.39926772391209, 450.94998496702260, 809.38765054824444},
};
int _planes[6][4] = // 面的数据
{
{0, 1, 2, 3}, // 每个面4个角的顶点对应于索引值
{4, 5, 6, 7},
{1, 5, 6, 2},
{3, 2, 6, 7},
{0, 4, 7, 3},
{0, 1, 5, 4}
};第二步,根据上述的实现原理,将其画在结果图上,为方便,我们直接在ShowCGRst函数中对结果图进行修改,这里我们使用了OpenCV的画点函数cv::circle和画线函数cv::line
// 将_points画到结果上
int x, y, z;
for (int i = 0; i < 8; ++i)
{
x = _points[i][0];
y = _points[i][1];
z = _points[i][2];
cv::circle(cvRst, cv::Point(x, y), 5, cv::Scalar(0, 0, 255), -1); // 使用OpenCV的画点函数
}
// 将点之间的关系(即箱子的边缘线)画出来
int x1, y1, z1;
for (int i = 0; i < 6; ++i)
{
for (int j = 0; j < 3; ++j)
{
x = _points[_planes[i][j]][0];
y = _points[_planes[i][j]][1];
z = _points[_planes[i][j]][2];
x1 = _points[_planes[i][j + 1]][0];
y1 = _points[_planes[i][j + 1]][1];
z1 = _points[_planes[i][j + 1]][2];
cv::line(cvRst, cv::Point(x, y), cv::Point(x1, y1), cv::Scalar(0, 255, 255), 2);
}
x = _points[_planes[i][0]][0];
y = _points[_planes[i][0]][1];
z = _points[_planes[i][0]][2];
cv::line(cvRst, cv::Point(x, y), cv::Point(x1, y1), cv::Scalar(0, 255, 255), 2);
}完整代码见开头的下载资源,百度网盘下载处
这里已经画出了箱子的“骨”,下一步我们将绘制箱子的“皮”