《动手学深度学习(PyTorch版)》笔记8.1
注:书中对代码的讲解并不详细,本文对很多细节做了详细注释。另外,书上的源代码是在Jupyter Notebook上运行的,较为分散,本文将代码集中起来,并加以完善,全部用vscode在python 3.9.18下测试通过,同时对于书上部分章节也做了整合。
Chapter8 Recurrent Neural Networks
8.1 Sequence Models
用 x t x_t xt表示在时间步(time step) t ∈ Z + t \in \mathbb{Z}^+ t∈Z+时观察到的股票价格 x t x_t xt。注意, t t t对于本文中的序列通常是离散的,并在整数或其子集上变化。假设一个交易员通过以下途径预测 x t x_t xt:
x t ∼ P ( x t ∣ x t − 1 , … , x 1 ) . x_t \sim P(x_t \mid x_{t-1}, \ldots, x_1). xt∼P(xt∣xt−1,…,x1).
8.1.1 Autoregressive Models
为了实现这个预测,交易员可以使用回归模型,但输入数量以及 x t − 1 , … , x 1 x_{t-1}, \ldots, x_1 xt−1,…,x1本身因 t t t而异,有效估计 P ( x t ∣ x t − 1 , … , x 1 ) P(x_t \mid x_{t-1}, \ldots, x_1) P(xt∣xt−1,…,x1)展开归结为以下两种策略。
第一种策略是,假设在现实情况下相当长的序列 x t − 1 , … , x 1 x_{t-1}, \ldots, x_1 xt−1,…,x1可能是不必要的,因此我们只需要满足某个长度为 τ \tau τ的时间跨度,即使用观测序列 x t − 1 , … , x t − τ x_{t-1}, \ldots, x_{t-\tau} xt−1,…,xt−τ,好处就是参数的数量总是不变的(至少在 t > τ t > \tau t>τ时如此),这种模型被称为自回归模型(autoregressive models),因为它们是对自己执行回归。
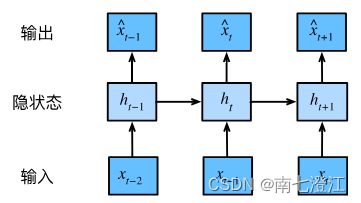
第二种策略如下图所示,指保留一些对过去观测的总结 h t h_t ht,并同时更新预测 x ^ t \hat{x}_t x^t和总结 h t h_t ht。这就产生了基于 x ^ t = P ( x t ∣ h t ) \hat{x}_t = P(x_t \mid h_{t}) x^t=P(xt∣ht)估计 x t x_t xt,以及公式 h t = g ( h t − 1 , x t − 1 ) h_t = g(h_{t-1}, x_{t-1}) ht=g(ht−1,xt−1)更新的模型。由于 h t h_t ht从未被观测到,这类模型也被称为隐变量自回归模型(latent autoregressive models)。
一个常见的假设是虽然特定值 x t x_t xt可能会改变,但是序列本身的动力不会改变。这样的假设是合理的,因为新的动力一定受新的数据影响,而我们不可能用目前所掌握的数据来预测新的动力。称不变的动力学静止的(stationary),因此整个序列的估计值都将通过以下的方式获得:
P ( x 1 , … , x T ) = ∏ t = 1 T P ( x t ∣ x t − 1 , … , x 1 ) . P(x_1, \ldots, x_T) = \prod_{t=1}^T P(x_t \mid x_{t-1}, \ldots, x_1). P(x1,…,xT)=t=1∏TP(xt∣xt−1,…,x1).
8.1.2 Markov Models
当 P ( x t ∣ x t − 1 , … , x 1 ) = P ( x t ∣ x t − τ , … , x t − 1 ) P(x_t \mid x_{t-1}, \ldots, x_1)=P(x_t \mid x_{t-\tau}, \ldots, x_{t-1}) P(xt∣xt−1,…,x1)=P(xt∣xt−τ,…,xt−1)时,称序列满足马尔可夫条件(Markov condition)。特别地,如果 τ = 1 \tau = 1 τ=1,得到一阶马尔可夫模型(first-order Markov model),
P ( x 1 , … , x T ) = ∏ t = 1 T P ( x t ∣ x t − 1 ) , P ( x 1 ∣ x 0 ) = P ( x 1 ) . P(x_1, \ldots, x_T) = \prod_{t=1}^T P(x_t \mid x_{t-1}) \text{ , } P(x_1 \mid x_0) = P(x_1). P(x1,…,xT)=t=1∏TP(xt∣xt−1) , P(x1∣x0)=P(x1).
当假设 x t x_t xt仅是离散值时,使用动态规划可以沿着马尔可夫链精确地计算结果。例如,利用 P ( x t + 1 ∣ x t , x t − 1 ) = P ( x t + 1 ∣ x t ) P(x_{t+1} \mid x_t, x_{t-1}) = P(x_{t+1} \mid x_t) P(xt+1∣xt,xt−1)=P(xt+1∣xt)可以高效地计算 P ( x t + 1 ∣ x t − 1 ) P(x_{t+1} \mid x_{t-1}) P(xt+1∣xt−1):
P ( x t + 1 ∣ x t − 1 ) = ∑ x t P ( x t + 1 , x t , x t − 1 ) P ( x t − 1 ) = ∑ x t P ( x t + 1 ∣ x t , x t − 1 ) P ( x t , x t − 1 ) P ( x t − 1 ) = ∑ x t P ( x t + 1 ∣ x t ) P ( x t ∣ x t − 1 ) \begin{aligned} P(x_{t+1} \mid x_{t-1}) &= \frac{\sum_{x_t} P(x_{t+1}, x_t, x_{t-1})}{P(x_{t-1})}\\ &= \frac{\sum_{x_t} P(x_{t+1} \mid x_t, x_{t-1}) P(x_t, x_{t-1})}{P(x_{t-1})}\\ &= \sum_{x_t} P(x_{t+1} \mid x_t) P(x_t \mid x_{t-1}) \end{aligned} P(xt+1∣xt−1)=P(xt−1)∑xtP(xt+1,xt,xt−1)=P(xt−1)∑xtP(xt+1∣xt,xt−1)P(xt,xt−1)=xt∑P(xt+1∣xt)P(xt∣xt−1)
原则上,将 P ( x 1 , … , x T ) P(x_1, \ldots, x_T) P(x1,…,xT)倒序展开也没什么问题,因为基于条件概率公式有:
P ( x 1 , … , x T ) = ∏ t = T 1 P ( x t ∣ x t + 1 , … , x T ) . P(x_1, \ldots, x_T) = \prod_{t=T}^1 P(x_t \mid x_{t+1}, \ldots, x_T). P(x1,…,xT)=t=T∏1P(xt∣xt+1,…,xT).
然而,在许多情况下,数据在时间上是前进的,显然未来的事件不能影响过去。在某些情况下,对于某些可加性噪声 ϵ \epsilon ϵ,我们可以找到 x t + 1 = f ( x t ) + ϵ x_{t+1} = f(x_t) + \epsilon xt+1=f(xt)+ϵ,反之则不行。
import torch
from torch import nn
from d2l import torch as d2l
import matplotlib.pyplot as plt
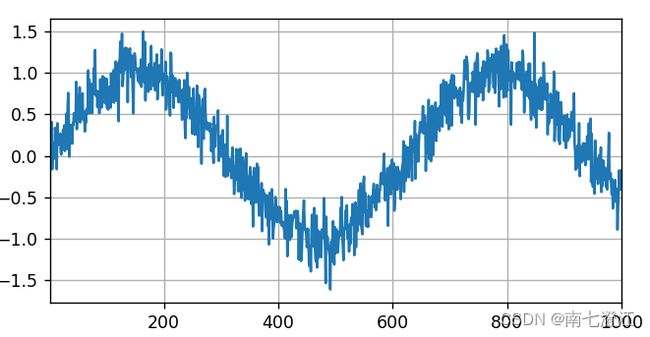
T = 1000 # 总共产生1000个点
time = torch.arange(1, T + 1, dtype=torch.float32)
x = torch.sin(0.01 * time) + torch.normal(0, 0.2, (T,))
d2l.plot(time, [x], 'time', 'x', xlim=[1, 1000], figsize=(6, 3))
plt.show()
#将这个序列转换为模型的特征-标签(feature-label)对
tau = 4
features = torch.zeros((T - tau, tau))#这比提供的样本少了tau个,因为没有足够的历史记录来描述前tau个样本。
for i in range(tau):
features[:, i] = x[i: T - tau + i]
labels = x[tau:].reshape((-1, 1))
batch_size, n_train = 16, 600
# 只有前n_train个样本用于训练
train_iter = d2l.load_array((features[:n_train], labels[:n_train]),
batch_size, is_train=True)
# 初始化网络权重的函数
def init_weights(m):
if type(m) == nn.Linear:
nn.init.xavier_uniform_(m.weight)
# 一个简单的多层感知机
def get_net():
net = nn.Sequential(nn.Linear(4, 10),
nn.ReLU(),
nn.Linear(10, 1))
net.apply(init_weights)
return net
# 平方损失。注意:MSELoss计算平方误差时不带系数1/2
loss = nn.MSELoss(reduction='none')
def train(net, train_iter, loss, epochs, lr):
trainer = torch.optim.Adam(net.parameters(), lr)
for epoch in range(epochs):
for X, y in train_iter:
trainer.zero_grad()
l = loss(net(X), y)
l.sum().backward()
trainer.step()
print(f'epoch {epoch + 1}, '
f'loss: {d2l.evaluate_loss(net, train_iter, loss):f}')
net = get_net()
train(net, train_iter, loss, 5, 0.01)
#单步预测
onestep_preds = net(features)
d2l.plot([time, time[tau:]],
[x.detach().numpy(), onestep_preds.detach().numpy()], 'time',
'x', legend=['data', '1-step preds'], xlim=[1, 1000],
figsize=(6, 3))
plt.show()
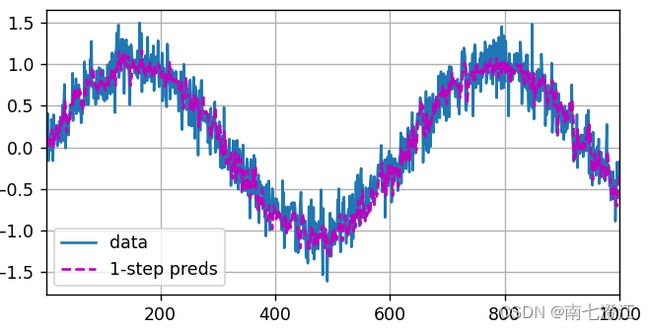
即使预测的时间步超过了 600 + 4 600+4 600+4(n_train + tau),单步预测效果不错,但如果数据观察序列的时间步只到 604 604 604,我们需要一步一步地向前迈进:
x ^ 605 = f ( x 601 , x 602 , x 603 , x 604 ) , x ^ 606 = f ( x 602 , x 603 , x 604 , x ^ 605 ) , x ^ 607 = f ( x 603 , x 604 , x ^ 605 , x ^ 606 ) , x ^ 608 = f ( x 604 , x ^ 605 , x ^ 606 , x ^ 607 ) , x ^ 609 = f ( x ^ 605 , x ^ 606 , x ^ 607 , x ^ 608 ) , … \hat{x}_{605} = f(x_{601}, x_{602}, x_{603}, x_{604}), \\ \hat{x}_{606} = f(x_{602}, x_{603}, x_{604}, \hat{x}_{605}), \\ \hat{x}_{607} = f(x_{603}, x_{604}, \hat{x}_{605}, \hat{x}_{606}),\\ \hat{x}_{608} = f(x_{604}, \hat{x}_{605}, \hat{x}_{606}, \hat{x}_{607}),\\ \hat{x}_{609} = f(\hat{x}_{605}, \hat{x}_{606}, \hat{x}_{607}, \hat{x}_{608}),\\ \ldots x^605=f(x601,x602,x603,x604),x^606=f(x602,x603,x604,x^605),x^607=f(x603,x604,x^605,x^606),x^608=f(x604,x^605,x^606,x^607),x^609=f(x^605,x^606,x^607,x^608),…
通常,对于直到 x t x_t xt的观测序列,其在时间步 t + k t+k t+k处的预测输出 x ^ t + k \hat{x}_{t+k} x^t+k称为 k k k步预测( k k k-step-ahead-prediction)。
#多步预测
multistep_preds = torch.zeros(T)
multistep_preds[: n_train + tau] = x[: n_train + tau]
for i in range(n_train + tau, T):
multistep_preds[i] = net(multistep_preds[i - tau:i].reshape((1, -1)))
d2l.plot([time, time[tau:], time[n_train + tau:]],
[x.detach().numpy(), onestep_preds.detach().numpy(),
multistep_preds[n_train + tau:].detach().numpy()], 'time',
'x', legend=['data', '1-step preds', 'multistep preds'],
xlim=[1, 1000], figsize=(6, 3))
plt.show()
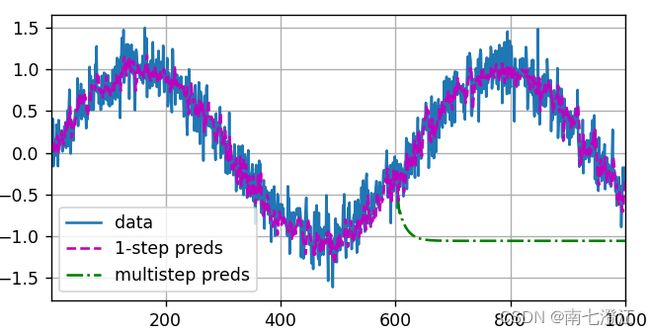
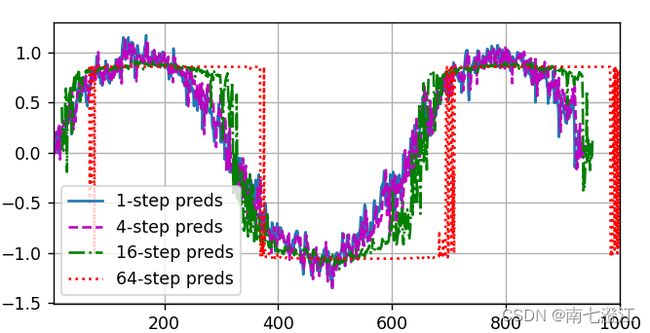
如上面例子所示,绿线的预测经过几个步骤之后就会衰减到一个常数,原因在于错误的累积:假设在步骤 1 1 1之后,我们积累了一些错误 ϵ 1 = ϵ ˉ \epsilon_1 = \bar\epsilon ϵ1=ϵˉ。于是,步骤 2 2 2的输入被扰动了 ϵ 1 \epsilon_1 ϵ1,结果积累的误差是 ϵ 2 = ϵ ˉ + c ϵ 1 \epsilon_2 = \bar\epsilon + c \epsilon_1 ϵ2=ϵˉ+cϵ1( c c c为常数),后面依此类推。基于 k = 1 , 4 , 16 , 64 k = 1, 4, 16, 64 k=1,4,16,64,通过对整个序列预测的计算,让我们更仔细地看一下 k k k步预测的困难。
max_steps = 64
features = torch.zeros((T - tau - max_steps + 1, tau + max_steps))
# 列i(i=tau)是来自(i-tau+1)步的预测,其时间步从(i)到(i+T-tau-max_steps+1)
for i in range(tau, tau + max_steps):
features[:, i] = net(features[:, i - tau:i]).reshape(-1)
steps = (1, 4, 16, 64)
d2l.plot([time[tau + i - 1: T - max_steps + i] for i in steps],
[features[:, tau + i - 1].detach().numpy() for i in steps], 'time', 'x',
legend=[f'{i}-step preds' for i in steps], xlim=[5, 1000],
figsize=(6, 3))
plt.show()