如何让FPGA中的SPI与其他模块互动起来
在上一篇文章《FPGA的SPI从机模块实现》中,已经实现了SPI的从机模块,如何通过SPI总线与FPGA内部其他模块进行通信,是本文的主要讨论内容。
一. 新建FPGA内部DAC控制模块
这里由于手上项目需求,有两块单独DAC902核心板,其中一片DAC902的输出作为另一片DAC902的基准源输入,我们分别称它们为DACref和DACsin,顾名思义一片提供基准源电压,一片输出正弦信号或者扩展成DDS信号输出。
因此,此模块的RTL模型必须有与SPI模块通信端和外部控制DAC902的信号管脚。所以预设计这个模块为:
module dac_reg_rw_spi(clk, nrst, rec_flag, rec_data, send_flag, sending_flag, send_data, dac_clk, dacref_clk, dacref_fudu, dacsin_output);
input clk, nrst; //模块系统时钟、复位
//与spi模块交互引脚 input rec_flag; //spi字节接收标志 input[7:0] rec_data; //spi接收数据缓存寄存器 input sending_flag; //spi模块正在发送数据标志位
//与spi模块交互引脚 output send_flag; //dac控制模块存在需要发送数据标志位,主要负责触发spi发送 output[7:0] send_data; //spi需要发送的数据
//与外部dac通信引脚 output[11:0] dacref_fudu; //直接输出到dacref中 output[11:0] dacsin_output; output dac_clk; output dacref_clk;
这里假定先发送一个字节的命令,紧接着通过spi发送、接收dac控制模块所需的数据。所以定义命令字如下:
//指令代号 parameter read_dacref_fudukongzhizi=8'b00000001; //读取dacref的幅度控制字 parameter read_dacsin_xiangweikongzhizi=8'b00000010; //读取dacsin的相位控制字 parameter read_dacsin_pinlvkongzhizi=8'b00000011; //读取dacsin的频率控制字 parameter set_dacsin_pinlvkongzhizi=8'b00100001; //写入dacsin的频率控制字 parameter set_dacsin_xiangweikongzhizi=8'b00100010; //写入dacsin的相位控制字 parameter set_dacref_fudukongzhizi=8'b00100011; //写入dacref的幅度控制字 parameter set_dac_clk_pdf=8'b00100100; //设置dac时钟预分频 parameter reset_to_default=8'b11100000; //复位dac控制模块 parameter start_dac=8'b11100001; //开启dac模块 parameter stop_dac=8'b11100010; //停止dac模块
由于spi属于串行接收,一次以8位传输格式,而我们的DDS模块需要32位的频率控制字、10位的相位控制字、12位的基准源幅度控制字(具体DDS原理,由于篇幅有限,这里就不再详细介绍了),因此我们需要读取这几个寄存器或者写入这几个寄存器,需要输出、接收不等的字节长度,而dds模块处于实时运行中,所以这里需要影子寄存器的介入。
//dac配置的影子寄存器(dac运作依据的值) reg[11:0] dacref_fudukongzhizi_shadow; reg[31:0] dacsin_pinlvkongzhizi_shadow; reg[9:0] dacsin_xiangweikongzhizi_shadow; reg[3:0] dac_clk_pdf_shadow;
开始设计dac的模块吧:
reg[3:0] rw_reg_status; //处理spi接收发送数据状态机 reg[3:0] rw_reg_status_temp; ////处理spi接收发送数据状态机(影子寄存器) reg[7:0] rec_data_temp; //8位spi数据接收缓存 reg[3:0] delay_cnt; //发送数据延时计数器 //dac配置寄存器临时值 reg[31:0] dacsin_pinlvkongzhizi; reg[11:0] dacref_fudukongzhizi; reg[9:0] dacsin_xiangweikongzhizi; reg[7:0] send_data; //与myspi模块通信脚 reg send_flag; //与myspi模块通信脚 reg[2:0] byte_sended_cnt; //发送数据字节数计数器 reg[2:0] byte_received_cnt; //接收数据字节数计数器 reg dac_start_flag; //dac使能脚 reg dacref_clk; //spi通信处理状态机,需要注意的是,clk时钟频率必须为sck时钟频率约10倍以上,保证正确操作。 always @ (posedge clk or negedge nrst) begin if(~nrst) begin
//初始化上述寄存器
rw_reg_status <= 4'h0;
rw_reg_status_temp <= 4'h0; //处理spi接收发送数据状态机(影子寄存器)
rec_data_temp <= 8'h00;
dacsin_pinlvkongzhizi <= 32'h00412345;
dacsin_xiangweikongzhizi <= 10'h123;
dacref_fudukongzhizi <= 12'h800;
delay_cnt <= 4'b0000;
byte_sended_cnt <= 3'b000;
send_flag <= 1'b0;
byte_received_cnt <= 3'b000;
dac_start_flag <= 1'b0;
dacref_clk <= 1'b0;
dacref_fudukongzhizi_shadow <= 12'h800;
dacsin_pinlvkongzhizi_shadow <= 32'h00423456;
dacsin_xiangweikongzhizi_shadow <= 10'h200;
dac_clk_pdf_shadow <= 4'h1;
end
else
begin
case (rw_reg_status)
4'b0000: begin //从机接收指令
if(rec_flag)
begin
rec_data_temp <= rec_data;
rw_reg_status <= 4'b0001; //进入命令解析
end
end
4'b0001: begin //指令解析,跳转相应状态
case (rec_data_temp)
reset_to_default: begin
rw_reg_status <= 4'b1110;
end
read_dacref_fudukongzhizi: begin
rw_reg_status <= 4'b0011; //读dacref的幅度控制字
end
read_dacsin_xiangweikongzhizi: begin
rw_reg_status <= 4'b0010; //读dacsin的相位控制字
end
read_dacsin_pinlvkongzhizi: begin
rw_reg_status <= 4'b0110; //读dacsin的频率控制字
end
set_dacsin_pinlvkongzhizi: begin
rw_reg_status <= 4'b1101; //设置dacsin的频率控制字
rw_reg_status_temp <= 4'b0101;
end
set_dacsin_xiangweikongzhizi: begin //设置dacsin的相位控制字
rw_reg_status <= 4'b1101;
rw_reg_status_temp <= 4'b0100;
end
set_dacref_fudukongzhizi: begin //设置dacref的幅度控制字
rw_reg_status <= 4'b1101;
rw_reg_status_temp <= 4'b1100;
end
set_dac_clk_pdf: begin //设置dac时钟预分频值
rw_reg_status <= 4'b1101;
rw_reg_status_temp <= 4'b1001;
end
start_dac: begin
rw_reg_status <= 4'b1010;
//rw_reg_status_temp <= 4'b0000;
end
stop_dac: begin
rw_reg_status <= 4'b1011;
//rw_reg_status_temp <= 4'b0000;
end
default: begin
rw_reg_status <= 4'b1101;
rw_reg_status_temp <= 4'b0000;
end
endcase
end
//----------------------------------------------------
4'b0011: begin //先发送幅度控制字高八位字节然后发送低八位字节
if(~sending_flag) begin //判断spi是否处于发送状态
case (byte_sended_cnt)
3'b000: begin
send_data <= {4'b0000, dacref_fudukongzhizi_shadow[11:8]};
rw_reg_status_temp <= 4'b0011;
rw_reg_status <= 4'b0111;
end
3'b001: begin
send_data <= dacref_fudukongzhizi_shadow[7:0];
rw_reg_status_temp <= 4'b0011;
rw_reg_status <= 4'b0111;
end
default: begin
byte_sended_cnt <= 3'b000;
rw_reg_status_temp <= 4'b0000;
rw_reg_status <= 4'b0000; //发送完成
end
endcase
end
else begin
send_flag <= 1'b0;
end
end
//----------------------------------------------------
4'b0010: begin
if(~sending_flag) begin //判断spi是否处于发送状态
case (byte_sended_cnt)
3'b000: begin
send_data <= {6'b000000, dacsin_xiangweikongzhizi_shadow[9:8]};
rw_reg_status_temp <= 4'b0010; //4'b0110;
rw_reg_status <= 4'b0111;
end
3'b001: begin
send_data <= dacsin_xiangweikongzhizi_shadow[7:0];
rw_reg_status_temp <= 4'b0010; //4'b0110;
rw_reg_status <= 4'b0111;
end
default: begin
rw_reg_status <= 4'b0000; //发送完成
rw_reg_status_temp <= 4'b0000;
byte_sended_cnt <= 3'b000;
end
endcase
end
else begin
send_flag <= 1'b0;
end
end
//----------------------------------------------------
4'b0110: begin
if(~sending_flag) begin //判断spi模块是否处于发送状态
case (byte_sended_cnt)
3'b000: begin
send_data <= dacsin_pinlvkongzhizi_shadow[31:24];
rw_reg_status_temp <= 4'b0110;
rw_reg_status <= 4'b0111; //4'b0100;
end
3'b001: begin
send_data <= dacsin_pinlvkongzhizi_shadow[23:16];
rw_reg_status_temp <= 4'b0110;
rw_reg_status <= 4'b0111; //4'b0100;
end
3'b010: begin
send_data <= dacsin_pinlvkongzhizi_shadow[15:8];
rw_reg_status_temp <= 4'b0110;
rw_reg_status <= 4'b0111;
end
3'b011: begin
send_data <= dacsin_pinlvkongzhizi_shadow[7:0];
rw_reg_status_temp <= 4'b0110;
rw_reg_status <= 4'b0111;
end
default: begin
rw_reg_status <= 4'b0000; //发送完成
rw_reg_status_temp <= 4'b0000;
byte_sended_cnt <= 3'b000;
end
endcase
end
else begin
send_flag <= 1'b0;
end
end
//通用状态
4'b0111: begin
//dac控制模块向spi模块提出发送请求,即生成send_flag脉冲 send_flag <= 1'b1; if(delay_cnt == 4'b0011) begin delay_cnt <= 4'b0000; rw_reg_status <= rw_reg_status_temp; byte_sended_cnt <= byte_sended_cnt+1; end else begin delay_cnt <= delay_cnt+1; end end //---------------------------------------------------- 4'b0101: begin //if(rec_flag) begin case (byte_received_cnt) 3'b000: begin if(rec_flag) begin //spi字节接收完成标志位 dacsin_pinlvkongzhizi[31:24] <= rec_data; rw_reg_status <= 4'b1101; byte_received_cnt <= 3'b001; end end 3'b001: begin if(rec_flag) begin dacsin_pinlvkongzhizi[23:16] <= rec_data; rw_reg_status <= 4'b1101; byte_received_cnt <= 3'b010; end end 3'b010: begin if(rec_flag) begin dacsin_pinlvkongzhizi[15:8] <= rec_data; rw_reg_status <= 4'b1101; byte_received_cnt <= 3'b011; end end 3'b011: begin if(rec_flag) begin dacsin_pinlvkongzhizi[7:0] <= rec_data; rw_reg_status <= 4'b1101; byte_received_cnt <= 3'b100; end end 3'b100: begin dacsin_pinlvkongzhizi_shadow <= dacsin_pinlvkongzhizi; byte_received_cnt <= 3'b101; end 3'b101: begin rw_reg_status <= 4'b1101; rw_reg_status_temp <= 4'b0000; byte_received_cnt <= 3'b000; end endcase //end end //----------------------------------------------------
在spi接收到命令字时,下一个系统时钟clk上跳沿则进入此状态,此时rec_flag可能仍然是有效,所以会先进入4'b1101模块等待rec_flag标志位复位后再接收数据,其他状态其实大同小异,这里不一一描述。 4'b0100: begin //if(rec_flag) begin case (byte_received_cnt) 3'b000: begin if(rec_flag) begin dacsin_xiangweikongzhizi[9:8] <= rec_data[1:0]; rw_reg_status <= 4'b1101; byte_received_cnt <= 3'b001; end end 3'b001: begin if(rec_flag) begin dacsin_xiangweikongzhizi[7:0] <= rec_data; rw_reg_status <= 4'b1101; byte_received_cnt <= 3'b010; end end 3'b010: begin dacsin_xiangweikongzhizi_shadow <= dacsin_xiangweikongzhizi; byte_received_cnt <= 3'b011; end 3'b011: begin rw_reg_status <= 4'b1101; //4'b0000; rw_reg_status_temp <= 4'b0000; byte_received_cnt <= 3'b000; end endcase //end end //---------------------------------------------------- 4'b1100: begin //if(rec_flag) begin case (byte_received_cnt) 3'b000: begin if(rec_flag) begin dacref_fudukongzhizi[11:8] <= rec_data[3:0]; rw_reg_status <= 4'b1101; byte_received_cnt <= 3'b001; end end 3'b001: begin if(rec_flag) begin dacref_fudukongzhizi[7:0] <= rec_data; rw_reg_status <= 4'b1101; byte_received_cnt <= 3'b010; end end 3'b010: begin dacref_fudukongzhizi_shadow <= dacref_fudukongzhizi; byte_received_cnt <= 3'b011; end 3'b011: begin dacref_clk <= 1'b1; if(delay_cnt == 4'b0011) begin delay_cnt <= 4'b0000; byte_received_cnt <= 3'b111; end else begin delay_cnt <= delay_cnt+1; end end 3'b111: begin dacref_clk <= 1'b0; rw_reg_status <= 4'b1101; rw_reg_status_temp <= 4'b0000; byte_received_cnt <= 3'b000; end endcase //end end 4'b1101: begin if(~rec_flag) begin //字节接收完成标志位复位等待 rw_reg_status <= rw_reg_status_temp; end end //---------------------------------------------------- 4'b1110: begin dacsin_pinlvkongzhizi <= 32'h00454321; dacsin_xiangweikongzhizi <= 10'h234; dacref_fudukongzhizi <= 12'h321; rw_reg_status_temp <= 4'b0000; rw_reg_status <= 4'b1101; end 4'b1111: begin if(delay_cnt == 4'b0011) begin delay_cnt <= 4'b0000; rw_reg_status <= 4'b0000; end else begin delay_cnt <= delay_cnt+1; end end //---------------------------------------------------- 4'b1010: begin dac_start_flag <= 1'b1; rw_reg_status <= 4'b1101; rw_reg_status_temp <= 4'b0000; end //---------------------------------------------------- 4'b1011: begin dac_start_flag <= 1'b0; rw_reg_status <= 4'b1101; rw_reg_status_temp <= 4'b0000; end //---------------------------------------------------- 4'b1001: begin if(rec_flag) begin dac_clk_pdf_shadow <= rec_data[3:0]; rw_reg_status <= 4'b1101; rw_reg_status_temp <= 4'b0000; end end endcase end end
既然dac控制模块的spi接收和发送设计好了,dds模块当然不能少,这部分就相对简单些。
//dac时钟分频模块
reg dac_clk;
reg[3:0] dac_clk_cnt; //分频,后面可以对dac_clk_cnt进行预分频处理
reg[3:0] dac_clk_pdf; //预分频
always @ (posedge clk or negedge nrst)
begin
if(~nrst)
begin
dac_clk <= 1'b0;
dac_clk_cnt <= 4'b0;
dac_clk_pdf <= 4'h1;
end
else begin
if(dac_start_flag) begin
if(dac_clk_cnt == dac_clk_pdf) begin
dac_clk_cnt <= 4'b0;
dac_clk <= ~dac_clk;
dac_clk_pdf <= dac_clk_pdf_shadow;
end
else begin
dac_clk_cnt <= dac_clk_cnt+1;
end
end
end
end
//dac输出模块
assign dacref_fudu = dacref_fudukongzhizi_shadow; //直接输出到dacref中
//reg[11:0] dacsin_output;
reg[31:0] leijiazi;
reg[9:0] dac_rom_addr;
//assign dacsin_enable = nrst&dac_start_flag;
always @ (posedge clk or negedge nrst)
begin
if(~nrst) //dacsin失能
begin
leijiazi <= {dacsin_xiangweikongzhizi_shadow, 22'h000000}; //累加字存储器
dac_rom_addr <= 10'h000;
end
else //dacsin使能
begin
if(dac_start_flag) begin
leijiazi <= leijiazi+dacsin_pinlvkongzhizi_shadow;
dac_rom_addr <= leijiazi[31:22];
end
else begin
dac_rom_addr <= 10'h000;
end
end
end
sin_table U3(
.clka(clk),
.addra(dac_rom_addr),
.douta(dacsin_output)
); 这里用到了名为sin_table的ROM软核,使用Block RAM组合成12位数据输出,10位数据深度(即1024个存储空间)的ROM,空间为12bits*1024。
题外话:既然提到了核,那么想当然联想到他们的分类:软核、固核和硬核三种。
软核:属于综合之前的RTL模型,只经过功能仿真,最后需要进行综合及布线后才能使用。但是不同的布线环境对其效果是不一样的,存在发送错误的可能性。
固核:带有局部规划信息的网表,对时序有一定约束后的产物,只需要通过布线工具就可以使用。
硬核:就是经过验证的设计版图,其物理版图不允许再进行修改,模块时序要求非常严格,可靠性相当高。
二. 修改spi从机模块
根据上面的dac控制模块,我们需要对先前的spi从机模块进行适当修改。
module myspi(nrst, clk, ncs, mosi, miso, sck, rec_flag, rec_data, send_flag, sending_flag, send_data); //miso主入从出,mosi主出从入 input clk, nrst; input ncs, mosi, sck; input send_flag; input[7:0] send_data; output[7:0] rec_data; output miso; output sending_flag; output rec_flag;这样,spi模块就加入与dac控制模块的通信线路了,是不是很方便。
三. 生成顶层模块
这个主要是考虑fpga最终IO口输出情况,有点像将模块打包成一个模块,在外看FPGA内部模块相当于一个黑匣子,我们操作的时候则只关心FPGA留给我们的通信管脚就可以了。
module dac_top(clk, nrst, ncs, mosi, miso, sck, dac_clk, dacref_fudu, dacsin_output, dacref_clk); input clk, nrst, ncs; input mosi, sck; output miso; output dac_clk; output dacref_clk; output[11:0] dacref_fudu; output[11:0] dacsin_output; wire send_flag, rec_flag, sending_flag; wire[7:0] rec_data; wire[7:0] send_data; myspi U1( .clk(clk), .nrst(nrst), .ncs(ncs), .mosi(mosi), .miso(miso), .sck(sck), .rec_flag(rec_flag), .rec_data(rec_data), .send_flag(send_flag), .sending_flag(sending_flag), .send_data(send_data) ); dac_reg_rw_spi U2( .clk(clk), .nrst(nrst), .rec_flag(rec_flag), .rec_data(rec_data), .send_flag(send_flag), .sending_flag(sending_flag), .send_data(send_data), .dac_clk(dac_clk), .dacref_fudu(dacref_fudu), .dacsin_output(dacsin_output), .dacref_clk(dacref_clk) ); endmodule
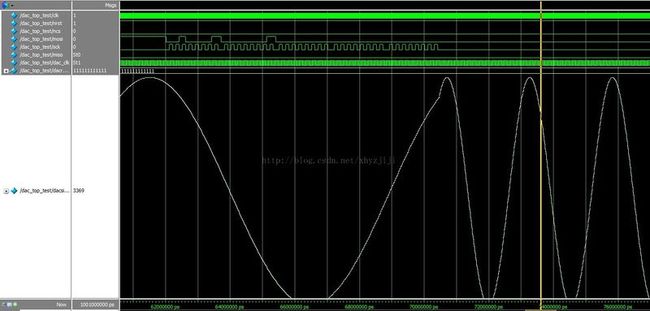
四. ModelSim的功能验证
module dac_top_test;
// Inputs
reg clk;
reg nrst;
reg ncs;
reg mosi;
reg sck;
// Outputs
wire miso;
wire dac_clk;
wire[11:0] dacref_fudu;
wire[11:0] dacsin_output;
// Instantiate the Unit Under Test (UUT)
dac_top uut (
.clk(clk),
.nrst(nrst),
.ncs(ncs),
.mosi(mosi),
.miso(miso),
.sck(sck),
.dac_clk(dac_clk),
.dacref_fudu(dacref_fudu),
.dacsin_output(dacsin_output)
);
initial begin
// Initialize Inputs
clk = 0;
nrst = 0;
ncs = 1;
mosi = 0;
sck = 0;
// Wait 100 ns for global reset to finish
#100;
nrst = 1;
#20;
ncs = 0;
#100; mosi = 0; //先发送高位 00100011 写入频率控制字
#100; sck = 1;
#100; sck = 0; mosi = 0;
#100; sck = 1;
#100; sck = 0; mosi = 1;
#100; sck = 1;
#100; sck = 0; mosi = 0;
#100; sck = 1;
#100; sck = 0; mosi = 0;
#100; sck = 1;
#100; sck = 0; mosi = 0;
#100; sck = 1;
#100; sck = 0; mosi = 1;
#100; sck = 1;
#100; sck = 0; mosi = 1;
#100; sck = 1;
#100; sck = 0;
//
#100; mosi = 0; //发送 00001111
#100; sck = 1;
#100; sck = 0; mosi = 0;
#100; sck = 1;
#100; sck = 0; mosi = 0;
#100; sck = 1;
#100; sck = 0; mosi = 0;
#100; sck = 1;
#100; sck = 0; mosi = 1;
#100; sck = 1;
#100; sck = 0; mosi = 1;
#100; sck = 1;
#100; sck = 0; mosi = 1;
#100; sck = 1;
#100; sck = 0; mosi = 1;
#100; sck = 1;
#100; sck = 0;
//
#100; mosi = 1; //发送 11111110
#100; sck = 1;
#100; sck = 0; mosi = 1;
#100; sck = 1;
#100; sck = 0; mosi = 1;
#100; sck = 1;
#100; sck = 0; mosi = 1;
#100; sck = 1;
#100; sck = 0; mosi = 1;
#100; sck = 1;
#100; sck = 0; mosi = 1;
#100; sck = 1;
#100; sck = 0; mosi = 1;
#100; sck = 1;
#100; sck = 0; mosi = 1;
#100; sck = 1;
#100; sck = 0;
//
#100; mosi = 0; //发送 00000001
#100; sck = 1;
#100; sck = 0; mosi = 0;
#100; sck = 1;
#100; sck = 0; mosi = 0;
#100; sck = 1;
#100; sck = 0; mosi = 0;
#100; sck = 1;
#100; sck = 0; mosi = 0;
#100; sck = 1;
#100; sck = 0; mosi = 0;
#100; sck = 1;
#100; sck = 0; mosi = 0;
#100; sck = 1;
#100; sck = 0; mosi = 1;
#100; sck = 1;
#100; sck = 0;
//
#100;
#100 sck = 1; #100 sck = 0;
#100 sck = 1; #100 sck = 0;
#100 sck = 1; #100 sck = 0;
#100 sck = 1; #100 sck = 0;
#100 sck = 1; #100 sck = 0;
#100 sck = 1; #100 sck = 0;
#100 sck = 1; #100 sck = 0;
#100 sck = 1; #100 sck = 0;
//
#100;
#100 sck = 1; #100 sck = 0;
#100 sck = 1; #100 sck = 0;
#100 sck = 1; #100 sck = 0;
#100 sck = 1; #100 sck = 0;
#100 sck = 1; #100 sck = 0;
#100 sck = 1; #100 sck = 0;
#100 sck = 1; #100 sck = 0;
#100 sck = 1; #100 sck = 0;
//
#100; mosi = 1; //发送 11100001 启动dac控制模块
#100; sck = 1;
#100; sck = 0; mosi = 1;
#100; sck = 1;
#100; sck = 0; mosi = 1;
#100; sck = 1;
#100; sck = 0; mosi = 0;
#100; sck = 1;
#100; sck = 0; mosi = 0;
#100; sck = 1;
#100; sck = 0; mosi = 0;
#100; sck = 1;
#100; sck = 0; mosi = 0;
#100; sck = 1;
#100; sck = 0; mosi = 1;
#100; sck = 1;
#100; sck = 0;
//
#50000; mosi = 0; //延时50000个时间单元后再次修改频率控制字
#100; sck = 1;
#100; sck = 0; mosi = 0;
#100; sck = 1;
#100; sck = 0; mosi = 1;
#100; sck = 1;
#100; sck = 0; mosi = 0;
#100; sck = 1;
#100; sck = 0; mosi = 0;
#100; sck = 1;
#100; sck = 0; mosi = 0;
#100; sck = 1;
#100; sck = 0; mosi = 0;
#100; sck = 1;
#100; sck = 0; mosi = 1;
#100; sck = 1;
#100; sck = 0;
//
#100; mosi = 0;
#100; sck = 1;
#100; sck = 0; mosi = 0;
#100; sck = 1;
#100; sck = 0; mosi = 0;
#100; sck = 1;
#100; sck = 0; mosi = 0;
#100; sck = 1;
#100; sck = 0; mosi = 0;
#100; sck = 1;
#100; sck = 0; mosi = 0;
#100; sck = 1;
#100; sck = 0; mosi = 0;
#100; sck = 1;
#100; sck = 0; mosi = 1;
#100; sck = 1;
#100; sck = 0;
//
#100; mosi = 0;
#100; sck = 1;
#100; sck = 0; mosi = 0;
#100; sck = 1;
#100; sck = 0; mosi = 0;
#100; sck = 1;
#100; sck = 0; mosi = 0;
#100; sck = 1;
#100; sck = 0; mosi = 0;
#100; sck = 1;
#100; sck = 0; mosi = 0;
#100; sck = 1;
#100; sck = 0; mosi = 0;
#100; sck = 1;
#100; sck = 0; mosi = 0;
#100; sck = 1;
#100; sck = 0;
//
#100; mosi = 0;
#100; sck = 1;
#100; sck = 0; mosi = 0;
#100; sck = 1;
#100; sck = 0; mosi = 0;
#100; sck = 1;
#100; sck = 0; mosi = 0;
#100; sck = 1;
#100; sck = 0; mosi = 0;
#100; sck = 1;
#100; sck = 0; mosi = 0;
#100; sck = 1;
#100; sck = 0; mosi = 0;
#100; sck = 1;
#100; sck = 0; mosi = 0;
#100; sck = 1;
#100; sck = 0;
//
#100; mosi = 0;
#100; sck = 1;
#100; sck = 0; mosi = 0;
#100; sck = 1;
#100; sck = 0; mosi = 0;
#100; sck = 1;
#100; sck = 0; mosi = 0;
#100; sck = 1;
#100; sck = 0; mosi = 0;
#100; sck = 1;
#100; sck = 0; mosi = 0;
#100; sck = 1;
#100; sck = 0; mosi = 0;
#100; sck = 1;
#100; sck = 0; mosi = 0;
#100; sck = 1;
#100; sck = 0;
end
always #5 clk=~clk; //sck必须为clk的频率的十分之一或低于十分之一
endmodule