poj2966(有问题)
仍然是多边形与线段求交(不规范),然后加最短路。
边权:如果相交则inf,如果不相交则其直线距离。
不知道为什么错,想出了几个脑残图形,都对了。
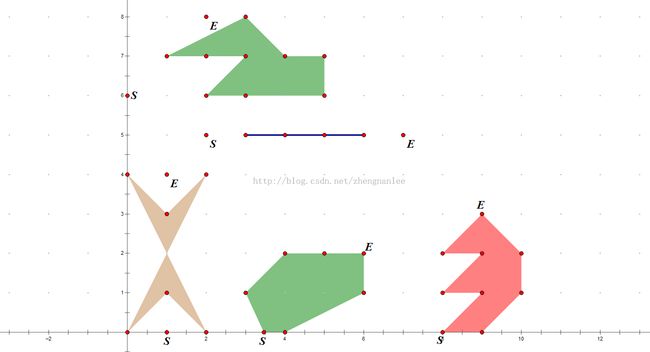
对应的测试数据:
1 0 1 4 6 0 0 1 1 2 0 2 4 1 3 0 4 0 0 5 4 7 1 0 5 2 5 4 3 4 1 4 -2 2 -1 0 0 0 2 6 8 2 0 4 2 4 4 2 6 0 4 2 4 0 2 2 2 0 0 5 0 4 1 0 2 0 3 0 4 0 0 0 2 2 9 2 0 3 0 5 0 5 1 4 1 3 2 1 1 2 1 3 1
非凸包版本(我认为对了)
#include <iostream>
#include <math.h>
#include <stdio.h>
#include <stdlib.h>
#define MAXN 1000
#define offset 10000
#define eps 1e-8
#define zero(x) (((x)>0?(x):-(x))<eps)
#define _sign(x) ((x)>eps?1:((x)<-eps?2:0))
#define MAXMAT 200
#define inf 1<<30
#define elem_t double
using namespace std;
struct point
{
double x, y;
};
struct line
{
point a, b;
};
double xmult(point p1, point p2, point p0)
{
return (p1.x - p0.x)*(p2.y - p0.y) - (p2.x - p0.x)*(p1.y - p0.y);
}
double distance_(point p1, point p2)
{
return sqrt((p1.x - p2.x)*(p1.x - p2.x) + (p1.y - p2.y)*(p1.y - p2.y));
}
bool opposite_side(point p1, point p2, line l)
{
return xmult(l.a, p1, l.b)*xmult(l.a, p2, l.b) < -eps;
}
bool intersect_ex(line u, line v)
{
return opposite_side(u.a, u.b, v) && opposite_side(v.a, v.b, u);
}
int insidepoly(int n, point *p, point a, point b)
{
for (int i = 0; i <= n; i++)
{
for (int j = 0; j <= n; j++)
{
line temp, temp2;
temp.a = p[i], temp.b = p[j];
temp2.a = a, temp2.b = b;
if (intersect_ex(temp, temp2))
{
return 1;
}
}
}
return 0;
}
int bellman_ford(int n, elem_t mat [][MAXMAT], int s, elem_t* min, int* pre){
int v[MAXMAT], i, j, k, tag;
for (i = 0; i < n; i++)
min[i] = inf, v[i] = 0, pre[i] = -1;
for (min[s] = 0, j = 0; j < n; j++){
for (k = -1, i = 0; i < n; i++)
if (!v[i] && (k == -1 || min[i] < min[k]))
k = i;
for (v[k] = 1, i = 0; i < n; i++)
if (!v[i] && mat[k][i] >= 0 && min[k] + mat[k][i] < min[i])
min[i] = min[k] + mat[pre[i] = k][i];
}
for (tag = 1, j = 0; tag && j <= n; j++)
for (tag = i = 0; i < n; i++)
for (k = 0; k < n; k++)
if (min[k] + mat[k][i] < min[i])
min[i] = min[k] + mat[pre[i] = k][i], tag = 1;
return j <= n;
}
int main()
{
point a, b;
cin >> a.x >> a.y >> b.x >> b.y;
int n;
cin >> n;
point p[110];
p[0] = a;
for (int i = 1; i <= n; i++)
{
cin >> p[i].x >> p[i].y;
}
p[++n] = b;
//for (int i = 0; i <= n; i++)
{
//cout << "No " << i << " point is " << p[i].x << ' ' << p[i].y << endl;
}
elem_t mat[MAXMAT][MAXMAT];
for (int i = 0; i <= n; i++)
{
for (int j = 0; j <= n; j++)
{
if (insidepoly(n, p, p[i], p[j]))
{
mat[i][j] = inf;
//cout << i << ' ' << j << ' ' << mat[i][j] << endl;
}
else
{
mat[i][j] = distance_(p[i], p[j]);
//cout << i << ' ' << j << ' ' << mat[i][j] << endl;
}
}
}
elem_t min[MAXMAT];
int pre[MAXMAT];
bellman_ford(n+1, mat, 0, min, pre);
/*for (int i = 0; i <= n; i++)
{
cout << i << ' ' << min[i] << endl;
}*/
printf("%.4lf\n", min[n]);
//system("pause");
}
凸包版本
#include <iostream>
#include <stdio.h>
#include <math.h>
#include <stdlib.h>
#define MAXN 1000
#define offset 10000
#define eps 1e-8
#define zero(x) (((x)>0?(x):-(x))<eps)
#define _sign(x) ((x)>eps?1:((x)<-eps?2:0))
#define MAXMAT 200
#define inf 1000000000
typedef double elem_t;
struct point{ double x, y; };
struct line{ point a, b; };
double xmult(point p1, point p2, point p0){
return (p1.x - p0.x)*(p2.y - p0.y) - (p2.x - p0.x)*(p1.y - p0.y);
}
double distance_(point p1, point p2)
{
return sqrt((p1.x - p2.x)*(p1.x - p2.x) + (p1.y - p2.y)*(p1.y - p2.y));
}
bool opposite_side(point p1, point p2, line l)
{
return xmult(l.a, p1, l.b)*xmult(l.a, p2, l.b) < -eps;
}
bool intersect_ex(line u, line v)
{
return opposite_side(u.a, u.b, v) && opposite_side(v.a, v.b, u);
}
int insidepoly(int n, point *p, point a, point b)
{
for (int i = 0; i < n; i++)
{
for (int j = 0; j < n; j++)
{
line temp, temp2;
temp.a = p[i], temp.b = p[j];
temp2.a = a, temp2.b = b;
if (intersect_ex(temp, temp2))
{
return 1;
}
}
}
return 0;
}
//graham算法顺时针构造包含所有共线点的凸包,O(nlogn)
point p1, p2;
int graham_cp(const void* a, const void* b){
double ret = xmult(*((point*) a), *((point*) b), p1);
return zero(ret) ? (xmult(*((point*) a), *((point*) b), p2) > 0 ? 1 : -1) : (ret > 0 ? 1 : -1);
}
void _graham(int n, point* p, int& s, point* ch){
int i, k = 0;
for (p1 = p2 = p[0], i = 1; i<n; p2.x += p[i].x, p2.y += p[i].y, i++)
if (p1.y - p[i].y>eps || (zero(p1.y - p[i].y) && p1.x > p[i].x))
p1 = p[k = i];
p2.x /= n, p2.y /= n;
p[k] = p[0], p[0] = p1;
qsort(p + 1, n - 1, sizeof(point), graham_cp);
for (ch[0] = p[0], ch[1] = p[1], ch[2] = p[2], s = i = 3; i < n; ch[s++] = p[i++])
for (; s>2 && xmult(ch[s - 2], p[i], ch[s - 1]) < -eps; s--);
}
int wipesame_cp(const void *a, const void *b)
{
if ((*(point *) a).y < (*(point *) b).y - eps) return -1;
else if ((*(point *) a).y > (*(point *) b).y + eps) return 1;
else if ((*(point *) a).x < (*(point *) b).x - eps) return -1;
else if ((*(point *) a).x > (*(point *) b).x + eps) return 1;
else return 0;
}
int _wipesame(point * p, int n)
{
int i, k;
qsort(p, n, sizeof(point), wipesame_cp);
for (k = i = 1; i < n; i++)
if (wipesame_cp(p + i, p + i - 1) != 0) p[k++] = p[i];
return k;
}
//构造凸包接口函数,传入原始点集大小n,点集p(p原有顺序被打乱!)
//返回凸包大小,凸包的点在convex中
//参数maxsize为1包含共线点,为0不包含共线点,缺省为1
//参数clockwise为1顺时针构造,为0逆时针构造,缺省为1
//在输入仅有若干共线点时算法不稳定,可能有此类情况请另行处理!
int graham(int n, point* p, point* convex, int maxsize = 1, int dir = 1)
{
point* temp = new point[n];
int s, i;
n = _wipesame(p, n);
_graham(n, p, s, temp);
for (convex[0] = temp[0], n = 1, i = (dir ? 1 : (s - 1)); dir ? (i < s) : i; i += (dir ? 1 : -1))
if (maxsize || !zero(xmult(temp[i - 1], temp[i], temp[(i + 1)%s])))
convex[n++] = temp[i];
delete []temp;
return n;
}
int bellman_ford(int n, elem_t mat [][MAXMAT], int s, elem_t* min, int* pre){
int v[MAXMAT], i, j, k, tag;
for (i = 0; i < n; i++)
min[i] = inf, v[i] = 0, pre[i] = -1;
for (min[s] = 0, j = 0; j < n; j++){
for (k = -1, i = 0; i < n; i++)
if (!v[i] && (k == -1 || min[i] < min[k]))
k = i;
for (v[k] = 1, i = 0; i < n; i++)
if (!v[i] && mat[k][i] >= 0 && min[k] + mat[k][i] < min[i])
min[i] = min[k] + mat[pre[i] = k][i];
}
for (tag = 1, j = 0; tag && j <= n; j++)
for (tag = i = 0; i < n; i++)
for (k = 0; k < n; k++)
if (min[k] + mat[k][i] < min[i])
min[i] = min[k] + mat[pre[i] = k][i], tag = 1;
return j <= n;
}
int main()
{
point a, b;
std::cin >> a.x >> a.y >> b.x >> b.y;
int n;
std::cin >> n;
point p[MAXMAT];
p[0] = a;
for (int i = 1; i <= n; i++)
{
std::cin >> p[i].x >> p[i].y;
}
p[++n] = b;
point convex[MAXMAT];
int convexsize = graham(n+1, p, convex, 1, 0);
convex[convexsize++] = b;
/*for (int i = 0; i < convexsize; i++)
{
std::cout <<"no." <<i << " point is "<<convex[i].x << ' ' << convex[i].y << std::endl;
}
for (int i = 0; i <= n; i++)
{
std::cout << "no." << i << " point is " << p[i].x << ' ' << p[i].y << std::endl;
}
std::cout << convexsize << std::endl;
std::cout << n << std::endl;*/
elem_t mat[MAXMAT][MAXMAT];
for (int i = 0; i < convexsize; i++)
{
for (int j = 0; j < convexsize; j++)
{
if (insidepoly(convexsize, convex, convex[i], convex[j]))
{
mat[i][j] = inf;
///std::cout << i << ' ' << j << ' ' << mat[i][j] << std::endl;
}
else if (i == j)
{
mat[i][j] = 0.0;
///std::cout << i << ' ' << j << ' ' << mat[i][j] << std::endl;
}
else
{
mat[i][j] = distance_(convex[i], convex[j]);
///std::cout << i << ' ' << j << ' ' << mat[i][j] << std::endl;
}
}
}
/*
for (int i = 0; i < convexsize; i++)
{
for (int j = 0; j < convexsize; j++)
{
std::cout << i << ' ' << j << ' ' << mat[i][j] << std::endl;
}
}*/
elem_t min[MAXN];
int pre[MAXN];
int iii = bellman_ford(convexsize, mat, 0, min, pre);
/*for (int i = 0; i < convexsize; i++)
{
std::cout << min[i] << std::endl;
}
for (int i = 1; i < 10; i++)
{
std::cout << pre[i] << '\t';
}
printf("\n");*/
printf("%.4f\n", min[convexsize - 1]);
//system("pause");
}