基础排序算法
七个基础排序算法(均为内部排序):
直接插入排序
希尔排序
冒泡排序
简单选择排序
快速排序
堆排序
二路归并排序
排序算法稳定性:经过排序后,具有相同关键码的元素之间的相对次序保持不变,则称该排序方法是稳定的;否则不稳定。
直接插入排序:
void InsertSort(int a[],int n){ // index start at 1, a[0] is temp one
int i,j;
for(i=2;i<=n;i++){
if(a[i]<a[i-1]){
a[0]=a[i];
a[i]=a[i-1];
for(j=i-2;a[j]>a[0];j--){
a[j+1]=a[j];
}
a[j+1]=a[0];
}
}
}直接插入排序是一种稳定的排序,时间复杂度O(n^2),空间复杂度是O(1)
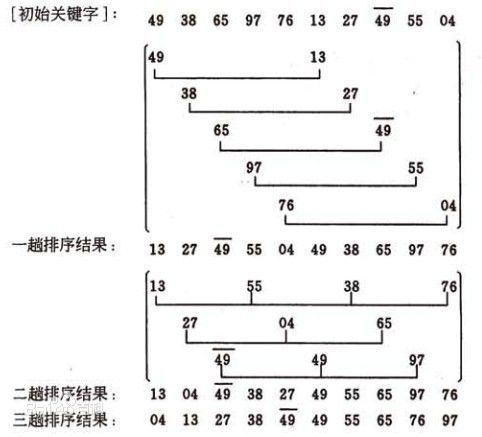
希尔排序:
按增量将元素分成不同的子集,对子集不断的进行插入排序。
void ShellSort(int a[],int n){ // index start at 1, a[0] is temp one
int d,i,j,k;
for(d=n/2;d>=1;d>>=1){
for(i=d+1;i<=n;i++){ // InsertSort
if(a[i]<a[i-d]){
a[0]=a[i];
a[i]=a[i-d];
for(j=i-2*d;j>0&&a[0]<a[j];j-=d){
a[j+d]=a[j];
}
a[j+d]=a[0];
}
}
}
}如果a[i]>a[i-d]始终成立,那么时间是O(nlogn), 但是在糟糕的情况下是O(n^2)。空间复杂度是O(1)
希尔排序是一种不稳定的排序方法
冒泡排序:
相邻元素如果反序两两交换,直到所有的位置统统确定下来。
void BubbleSort(int a[],int n){ // index start at 1, a[0] is temp one
int i,j,k;
for(i=1;i<=n;i++){
for(j=1;j<=n-i;j++){
if(a[j]>a[j+1]) {
a[j]=a[j]^a[j+1]; a[j+1]=a[j]^a[j+1]; a[j]=a[j]^a[j+1];
}
}
}
}这是稳定的排序方法,时间复杂度:O(n^2)
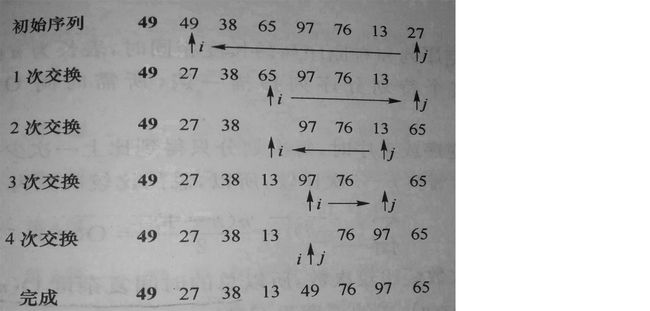
快速排序:
选择一个轴值,使得左边的元素的值小于它,右边的元素的值大于它。对于产生的分区重复上诉过程。该算法是对冒泡排序的改进。
int partion(int a[],int start,int end){
int i=start,j=end;
int temp=a[start];
while(i<j){
while(i<j && a[j]>=temp) j--;
a[i]=a[j]; // i are more
while(i<j && a[i]<=temp) i++;
a[j]=a[i]; // j are more
}
a[i]=temp; // at end , i=j
return i;
}
void Qsort(int a[],int start,int end){
if(start<end){
int d=partion(a,start,end);
Qsort(a,start,d);
Qsort(a,d+1,end);
}
}快速排序不是一种稳定的排序算法。平均来说,Qsort的时间复杂度是O(nlogn)
简单选择排序:
思想:第i趟将待排序记录r[i……n]中最小的元素和r[i]交换
void SelectSort(int a[],int n){
for(int i=1;i<n;i++){
int dex=i;
for(int j=i+1;j<=n;j++){
if(a[dex]>a[j]) dex=j; // use the index to compare and find min one
}
if(dex!=i) {
a[dex]=a[dex]^a[i]; a[i]=a[dex]^a[i]; a[dex]=a[dex]^a[i];
}
}
}堆排序:
堆分为大根堆和小根堆。父节点比左右孩子大或者小。
维护堆的性质:
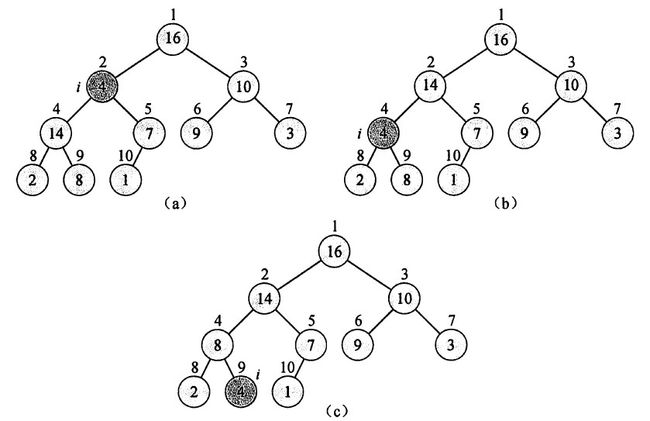
堆排序思路:先建堆,自下而上建堆。然后将根节点取出并输出,再把最后的元素放在根节点上,维护堆。重复上面的过程。
void Sift(int a[],int s,int n){
int i=s,j=2*s;
while(j<=n) {
//if(j<n && a[j]>a[j+1]) j=j+1; // small heap get big --> small
//if(a[i]<=a[j]) break;
if(j<n && a[j]<a[j+1]) j=j+1; // big heap get small --> big
if(a[i]>=a[j]) break;
else {
swap(a[i],a[j]);
i=j; j=2*j;
}
}
}
void HeapSort(int a[],int s,int n){
for(int i=n/2;i>=1;i--) Sift(a,i,n); // 建堆自下而上
show(a,n);
for(int i=n;i>1;i--){
swap(a[1],a[i]);
Sift(a,1,i-1);
}
}堆排序的时间复杂度为O(nlogn),是不稳定的排序算法
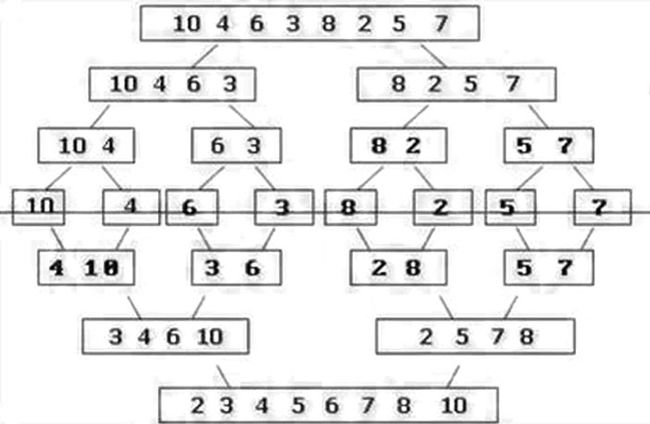
二路归并排序:
最开始是相邻元素排序,递归进行,比较相邻子集的序列,最后完成进行排序。
const int N=1e3;
int b[N];
void merge(int a[],int sdex,int mdex,int edex){
int i=sdex,j=mdex+1,k=sdex;
while(i<=mdex&&j<=edex){
if(a[i]<a[j]) b[k++]=a[i++];
else b[k++]=a[j++];
}
while(i!=mdex+1) b[k++]=a[i++];
while(j!=edex+1) b[k++]=a[j++];
for(i=sdex;i<=edex;i++) a[i]=b[i];
}
void MergeSort(int a[],int sdex,int edex){
int mdex;
if(sdex<edex){
mdex=(sdex+edex)/2;
MergeSort(a,sdex,mdex);
MergeSort(a,mdex+1,edex);
merge(a,sdex,mdex,edex);
}
}