计算机视觉与模式识别(2)—— A4纸矫正
上次写了A4纸的边缘提取,发现我的代码还是存在着很多的问题,比如令人诟病的静态阈值,还有非结构化的编程风格。于是我重新整理了一下,把A4纸边缘提取的代码整合为一个类。不过那个该死的阈值啊,我暂时还没有找到完美的方法,使得适用于所有的图像_(:з」∠)_。
优化的方法倒是有一点,那就是降低标准,择优录取。也就是把阈值调得很低,但是峰值提取的结果只取最优的4个。当然啦,这种方法偶尔会取到奇怪的边缘,而且由于阈值的降低,导致的计算量也成倍增长,特别是Hough变换。但综合来看,鲁棒性还是增强了不少。
另外,大家可以搜下有关 “边缘提取动态阈值获取” 的论文。梯度阈值动态的一个简单方法,就是取所有像素点梯度的平均值,至于效果怎样,有待大家尝试哦~
那么,在上一节的基础上,我们还能做什么呢?
我们现在只是知道了A4纸的边缘和角点,每一张A4纸都处于不同的的角度、位置,甚至有着不同的形状。这些“畸形”的A4纸不利于我们进一步的图像处理,因此需要把它们矫正成统一的矩形。
输入图像:
普通A4打印纸,上面可能有手写笔记或者打印内容,但是拍照时可能角度不正。
输出图像:
已经矫正好的标准普通A4纸(210:297),并裁掉无用的其他内容,只保留完整的A4纸张。
实验中,我使用了两种方法,一种是Projective Transform(仿射变换),一种是Morphing(变形)。
两种方法各有优缺点,其中仿射变换处理速度快,矫正图片准确,但是涉及矩阵演算。Morphing的图像准确度没有仿射变换高,但是原理通俗易懂,不怎么需要演算。
方法一:Projective Transform
主要参考这篇博客:http://blog.csdn.net/xiaowei_cqu/article/details/26471527
但是有几个错误需要指出来,![]() 不为0时,应得到:
不为0时,应得到:
a11= x1 - x0 +a13* x1 a12= y1 - y0 +a13* y1 a13= 
a21 = x3 - x0 + a23 * x3 a22= y3 - y0 +a23* y3 a23=
a31 = x0 a32 = y0 a33 = 1
关键代码:
Matrix3x3 A4ShapeCorrect::squareToQuadrilateral(double x0, double y0, double x1, double y1, double x2,
double y2, double x3, double y3)
{
double dx3 = x0 - x1 + x2 - x3;
double dy3 = y0 - y1 + y2 - y3;
if (dx3 == 0.0f && dy3 == 0.0f)
{
Matrix3x3 result(x1 - x0, y1 - y0, 0,
x2 - x1, y2 - y1, 0,
x0, y0, 1);
return result;
}
else
{
double dx1 = x1 - x2;
double dx2 = x3 - x2;
double dy1 = y1 - y2;
double dy2 = y3 - y2;
double denominator = dx1 * dy2 - dx2 * dy1;
double a13 = (dx3 * dy2 - dx2 * dy3) / denominator;
double a23 = (dx1 * dy3 - dx3 * dy1) / denominator;
Matrix3x3 result(x1 - x0 + a13 * x1, y1 - y0 + a13*y1, a13,
x3 - x0 + a23*x3, y3 - y0 + a23*y3, a23,
x0, y0, 1);
return result;
}
} 计算出了变换矩阵的系数后,只需要应用到每个像素坐标就好了。
要注意方向:从目标像素映射到原像素,并且计算插值。
Matrix3x3 H = squareToQuadrilateral(dots[0]->x, dots[0]->y, dots[1]->x, dots[1]->y,
dots[2]->x, dots[2]->y, dots[3]->x, dots[3]->y);
/* Method 1: Projective Transforming */
cimg_forXY(*target, x, y)
{
double _x = (double)x / _width;
double _y = (double)y / _height;
double denominator = H.a13 * _x + H.a23 * _y + H.a33;
double tx = (H.a11 * _x + H.a21 * _y + H.a31) / denominator;
double ty = (H.a12 * _x + H.a22 * _y + H.a32) / denominator;
cimg_forC(*target, c)
(*target)(x, y, 0, c) = bilinear(img, tx, ty, 0, c);
}
方法二:Morphing
针对三角形进行Morph变换,思路类似双线性插值:
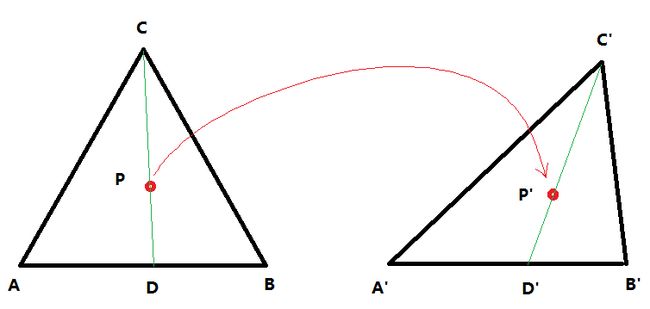
如何计算P'的坐标::DA / BA = D'A' / B'A' , PC / DC = P'C' / D'C', 其中ABC、A'B'C'和P坐标已知。
有了计算变换三角形位置的方法,我们就可以把原A4纸延对角线切割成两个三角形,把目标图形也延对角线切割成两个三角形,然后分别对这两个三角形内的像素点坐标做Morph变换即可。
其中还要解决的问题是如何判断一个点在三角形内,参考博客:http://www.cnblogs.com/graphics/archive/2010/08/05/1793393.html
我采用了第3种方法。
关键代码:
Dot* A4ShapeCorrect::morph(Triangle source, Triangle target, Dot p)
{
Dot a = source.a, b = source.b, c = source.c;
Dot at = target.a, bt = target.b, ct = target.c;
if (p == a) return new Dot(at.x, at.y);
if (p == b) return new Dot(bt.x, bt.y);
if (p == c) return new Dot(ct.x, ct.y);
Line cp(c, p);
Line ab(a, b);
Dot* d = cp.intersect(ab);
// DA / BA
double ABrate = (b.x - a.x != 0) ? (d->x - a.x) / (b.x - a.x) : (d->y - a.y) / (b.y - a.y);
// PC / DC
double CDrate = (d->x - c.x != 0) ? (p.x - c.x) / (d->x - c.x) : (p.y - c.y) / (d->y - c.y);
double dtx = ABrate*(bt.x - at.x) + at.x;
double dty = ABrate*(bt.y - at.y) + at.y;
double ptx = CDrate*(dtx - ct.x) + ct.x;
double pty = CDrate*(dty - ct.y) + ct.y;
return new Dot(ptx, pty);
}
同样要注意方向:从目标像素映射到原像素,并且计算插值。
/* Method 2: Morphing */
Dot At(0, 0);
Dot Bt(target->width() - 1, 0);
Dot Ct(target->width() - 1, target->height() - 1);
Dot Dt(0, target->height() - 1);
Dot A(dots[0]->x, dots[0]->y);
Dot B(dots[1]->x, dots[1]->y);
Dot C(dots[2]->x, dots[2]->y);
Dot D(dots[3]->x, dots[3]->y);
cimg_forXY(*target, x, y)
{
Dot P(x, y), *p = NULL;
if (pointInTriangle(Triangle(At, Bt, Ct), P))
p = morph(Triangle(At, Bt, Ct), Triangle(A, B, C), P);
else if (pointInTriangle(Triangle(At, Ct, Dt), P))
p = morph(Triangle(At, Ct, Dt), Triangle(A, C, D), P);
if (p != NULL)
{
cimg_forC(*target, c)
(*target)(x, y, 0, c) = bilinear(img, p->x, p->y, 0, c);
}
}
对于以上两种方法,都涉及一个前提:我们找到的原图A4纸角点必须按顺序ABCD排列,或者我们至少知道各角点对应的A4纸方位。
我的方法是4个点先按y轴排序,y最小的不是A点就是B点,然后找跟这点最近的点,找到后这两个点就分别是A和B(事实上并不一定,比如扁菱形)。接着判断矩形是横的还是竖的,然后准确判断AB位置,最后准确判断CD位置。只能说So far so good!
void A4ShapeCorrect::reorderDots(std::vector<Dot*>& dots)
{
std::sort(dots.begin(), dots.end(), [](const Dot* a, const Dot* b) { return a->y < b->y; });
double min = DBL_MAX;
int temp;
for (int i = 1; i < dots.size(); ++i)
{
double dis = dots[0]->distance(*dots[i]);
if (min > dis)
{
min = dis;
temp = i;
}
}
std::swap(dots[1], dots[temp]);
if (dots[1]->y > dots[2]->y || dots[1]->y > dots[3]->y)
{
std::swap(dots[0], dots[1]);
if (dots[2]->y > dots[3]->y)
{
std::swap(dots[2], dots[3]);
}
}
else
{
if (dots[0]->x > dots[1]->x)
{
std::swap(dots[0], dots[1]);
}
if (dots[2]->x < dots[3]->x)
{
std::swap(dots[2], dots[3]);
}
}
}