Attach Gripper to Robot
本教程介绍了怎样从现有的机器人零件,如移动基体,简单手臂和手抓等,来生成一个复杂的机器人。
Robot Components
启动gazebo,并且确保你可以从以前的教程中导入模型
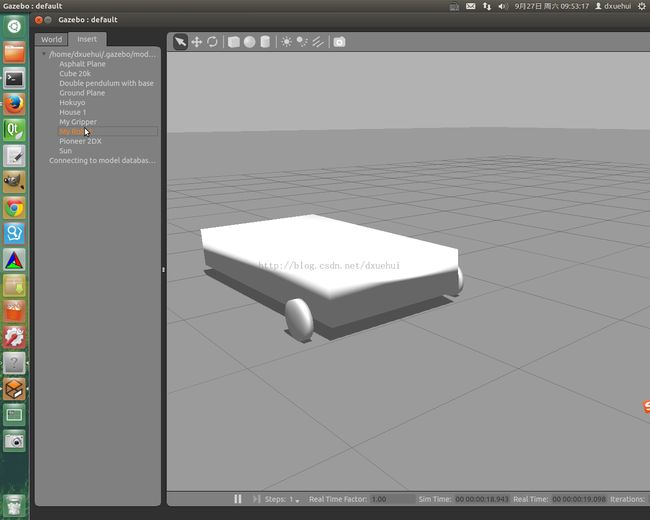
Mobile Base
在教程Mobile Robot tutorial中,你将有你自己的移动机器人。
1.在本教程中,修改~/.gazebo/models/my_robot/model.sdf来确保模型足够的大,以便模型足够大,可以完成抓取。
gedit ~/.gazebo/models/my_robot/model.sdf
更新内容,来确保模型体足够大,并且重新定位相应的车轮。
<?xml version='1.0'?>
<sdf version='1.4'>
<model name="mobile_base">
<link name='chassis'>
<pose>0 0 .25 0 0 0</pose>
<inertial>
<mass>20.0</mass>
<pose>-0.1 0 -0.1 0 0 0</pose>
<inertia>
<ixx>0.5</ixx>
<iyy>1.0</iyy>
<izz>0.1</izz>
</inertia>
</inertial>
<collision name='collision'>
<geometry>
<box>
<size>2 1 0.3</size>
</box>
</geometry>
</collision>
<visual name='visual'>
<geometry>
<box>
<size>2 1 0.3</size>
</box>
</geometry>
</visual>
<collision name='caster_collision'>
<pose>-0.8 0 -0.125 0 0 0</pose>
<geometry>
<sphere>
<radius>.125</radius>
</sphere>
</geometry>
<surface>
<friction>
<ode>
<mu>0</mu>
<mu2>0</mu2>
</ode>
</friction>
</surface>
</collision>
<visual name='caster_visual'>
<pose>-0.8 0 -0.125 0 0 0</pose>
<geometry>
<sphere>
<radius>.125</radius>
</sphere>
</geometry>
</visual>
</link>
<link name="left_wheel">
<pose>0.8 0.6 0.125 0 1.5707 1.5707</pose>
<collision name="collision">
<geometry>
<cylinder>
<radius>.125</radius>
<length>.05</length>
</cylinder>
</geometry>
</collision>
<visual name="visual">
<geometry>
<cylinder>
<radius>.125</radius>
<length>.05</length>
</cylinder>
</geometry>
</visual>
</link>
<link name="right_wheel">
<pose>0.8 -0.6 0.125 0 1.5707 1.5707</pose>
<collision name="collision">
<geometry>
<cylinder>
<radius>.125</radius>
<length>.05</length>
</cylinder>
</geometry>
</collision>
<visual name="visual">
<geometry>
<cylinder>
<radius>.125</radius>
<length>.05</length>
</cylinder>
</geometry>
</visual>
</link>
<joint type="revolute" name="left_wheel_hinge">
<pose>0 0 -0.03 0 0 0</pose>
<child>left_wheel</child>
<parent>chassis</parent>
<axis>
<xyz>0 1 0</xyz>
</axis>
</joint>
<joint type="revolute" name="right_wheel_hinge">
<pose>0 0 0.03 0 0 0</pose>
<child>right_wheel</child>
<parent>chassis</parent>
<axis>
<xyz>0 1 0</xyz>
</axis>
</joint>
</model>
</sdf>
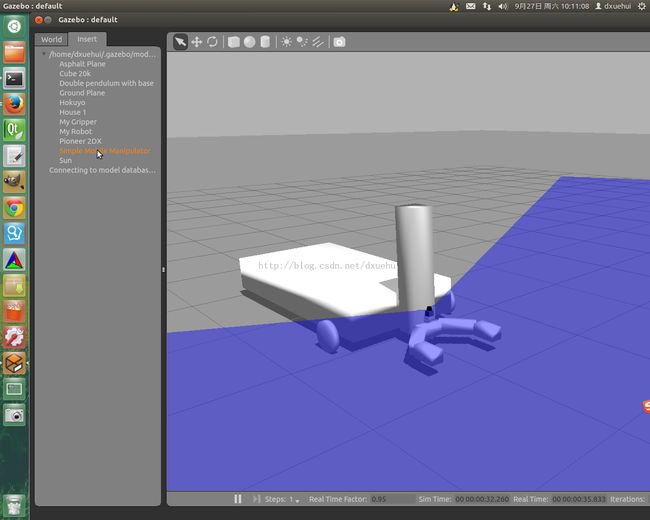
Assembling a Composite Robot
1.用一个简单的抓手安装在移动机器人上,生成一个新的模型目录。mkdir ~/.gazebo/models/simple_mobile_manipulator
并且编辑配置文件
gedit ~/.gazebo/models/simple_mobile_manipulator/model.config
将下文复制进去
<?xml version="1.0"?>
<model>
<name>Simple Mobile Manipulator</name>
<version>1.0</version>
<sdf version='1.4'>manipulator.sdf</sdf>
<author>
<name>My Name</name>
<email>[email protected]</email>
</author>
<description>
My simple mobile manipulator
</description>
</model>
2.生成模型的SDF文件
gedit ~/.gazebo/models/simple_mobile_manipulator/manipulator.sdf
将下文复制进去
<?xml version="1.0" ?>
<sdf version="1.3">
<model name="simple_mobile_manipulator">
<include>
<uri>model://my_gripper</uri>
<pose>1.3 0 0.1 0 0 0</pose>
</include>
<include>
<uri>model://my_robot</uri>
<pose>0 0 0 0 0 0</pose>
</include>
<joint name="arm_gripper_joint" type="revolute">
<parent>mobile_base::chassis</parent>
<child>simple_gripper::riser</child>
<axis>
<limit>
<lower>0</lower>
<upper>0</upper>
</limit>
<xyz>0 0 1</xyz>
</axis>
</joint>
<!-- attach sensor to the gripper -->
<include>
<uri>model://hokuyo</uri>
<pose>1.3 0 0.3 0 0 0</pose>
</include>
<joint name="hokuyo_joint" type="revolute">
<child>hokuyo::link</child>
<parent>simple_gripper::palm</parent>
<axis>
<xyz>0 0 1</xyz>
<limit>
<upper>0</upper>
<lower>0</lower>
</limit>
</axis>
</joint>
</model>
</sdf>
3.确保model.config和manipulator.sdf文件被保存,启动gazebo,在 insert tab中添加模型 Simple Mobile Manipulator。