SDP(SemiDefinite Programing,半定规划)是凸优化(Convex Optimization)的一种,貌似近些年来比较热,反正这个东西常常出现在我看的论文中。论文里一般是把一个问题转化为SDP,然后极不负责任的扔了一句可以使用SeDuMi等工具箱解决就完事了,搞的本人非常迷茫,于是决定一探究竟,谁知还搞了个意外收获,那就是YALMIP工具箱。SeDuMi和YALMIP都是Matlab的工具箱,下载和安装请参见它们的主页。下面我就分别谈谈怎么样将两个工具箱应用于SDP求解吧。
SDP问题的对偶原型及求解步骤
下面就是一个典型的SDP问题:
目标函数是线性的,有一个等式约束,有一个不等式约束,最后一个是LMI(Linear Matrix Inequality,线性矩阵不等式)约束。使用SeDuMi来解决此类问题,我们就要自行构造调用SeDuMi的核心函数sedumi(Att,bt,ct,K)的四个参数。
等式约束的个数: K.f=size(A1,1)
不等式约束的个数: K.l=size(A2,1)
LMI中矩阵的阶数: K.s=size(F0,1)
这样,我们就可以调用 [x,y,info]=sedumi(Att,bt,ct,K) 来求解了,其中的y即为优化后得到的最优解。
一个典型的例子
这里举一个简单的例子,并给出Matlab的实际代码,以便能更好地理解运用上节的知识。SDP的一个最简单的应用就是最大化矩阵的特征值问题。如我们要找 y1,y2,y3 使矩阵 F=F0+y1F1+y2F2+y3F3 的特征值最大化,其中 F0,F1,F2,F3 分别为:
同时,我们对 y1,y2,y3 也给出一个不等式限制和一个等式限制:
那么这个问题可以描述成以下形式:
其中 y,A1,A2,b1,b2 的取值分别为:
下面我们就可以使用sedumi函数进行优化求解了,给出Matlab代码:
|
|
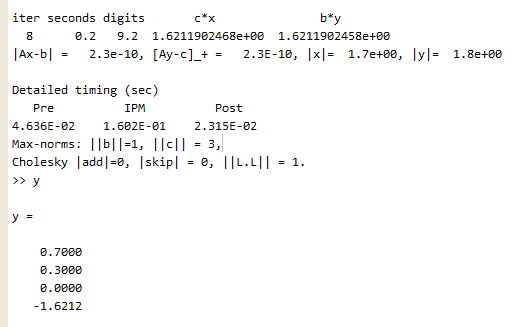
最后得到的y即为最优解,它的前三个分量就是我们想要的答案。如下图所示:
YALMIP一出,谁与争锋
我们从上面也可以看到,SeDuMi的求解过程还是比较复杂的,不仅需要将优化问题先化成SDP的标准形式,而且参数的配置也相当费功夫,很不直观!在搜索SeDuMi的过程中,我又发现了一个叫YALMIP的工具箱,它的命名挺有意思,Yet Another LMI Package,又一个LMI包,呵呵,不过它可不是徒有虚名啊!简单的说,它可以非常直观的将目标函数和约束条件赋给它的核心函数solvesdp(Constraint,Objective),下面我们就看看解决同样的问题YALMIP是怎么操作的,废话不说了,直接上Matlab代码:
|
|
结果如下图所示:

可以看到两者的结果基本是一致的,当然,我怀疑YALMIP在操作的过程中有调用SeDuMi的可能性,但是不管怎么说,YALMIP的代码则更直观,更容易理解,甚至连双向不等式都可以直接书写,这都是明显的,可见它的牛逼,所以必然果断抛弃其他一切优化工具箱,你的意见呢?嘿嘿~
P.S. 最近总是学术文章,我也有点受不鸟了~写这玩意累啊,歇着去了。。。
Posted by 马斯特 - 9月 11日 2010
如需转载,请注明: 本文来自 进击的马斯特