梯度下降与随机梯度下降
梯度下降法先随机给出参数的一组值,然后更新参数,使每次更新后的结构都能够让损失函数变小,最终达到最小即可。在梯度下降法中,目标函数其实可以看做是参数的函数,因为给出了样本输入和输出值后,目标函数就只剩下参数部分了,这时可以把参数看做是自变量,则目标函数变成参数的函数了。梯度下降每次都是更新每个参数,且每个参数更新的形式是一样的,即用前一次该参数的值减掉学习率和目标函数对该参数的偏导数(如果只有1个参数的话,就是导数),为什么要这样做呢?通过取不同点处的参数可以看出,这样做恰好可以使原来的目标函数值变低,因此符合我们的要求(即求函数的最小值)。即使当学习速率固定(但不能太大),梯度下降法也是可以收敛到一个局部最小点的,因为梯度值会越来越小,它和固定的学习率相乘后的积也会越来越小。在线性回归问题中我们就可以用梯度下降法来求回归方程中的参数。有时候该方法也称为批量梯度下降法,这里的批量指的是每一时候参数的更新使用到了所有的训练样本。
首先我们来定义输出误差,即对于任意一组权值向量,那它得到的输出和我们预想的输出之间的误差值。定义误差的方法很多,不同的误差计算方法可以得到不同的权值更新法则,这里我们先用这样的定义:
上面公式中D代表了所有的输入实例,或者说是样本,d代表了一个样本实例,od表示感知器的输出,td代表我们预想的输出。
这样,我们的目标就明确了,就是想找到一组权值让这个误差的值最小,显然我们用误差对权值求导将是一个很好的选择,导数的意义是提供了一个方向,沿着这个方向改变权值,将会让总的误差变大,更形象的叫它为梯度。

既然梯度确定了E最陡峭的上升的方向,那么梯度下降的训练法则是:

梯度上升和梯度下降其实是一个思想,上式中权值更新的+号改为-号也就是梯度上升了。梯度上升用来求函数的最大值,梯度下降求最小值。
这样每次移动的方向确定了,但每次移动的距离却不知道。这个可以由步长(也称学习率)来确定,记为α。这样权值调整可表示为:
关于学习率
如果学习速率过大,这每次迭代就有可能出现超调的现象,会在极值点两侧不断发散,最终损失函数的值是越变越大,而不是越来越小。在损失函数值——迭代次数的曲线图中,可以看到,该曲线是向上递增的。当然了,当学习速率过大时,还可能出现该曲线不断震荡的情形。如果学习速率太小,这该曲线下降得很慢,甚至在很多次迭代处曲线值保持不变。那到底该选什么值呢?这个一般是根据经验来选取的,比如从…0.0001,0.001,.0.01,0.1,1.0…这些参数中选,看那个参数使得损失值和迭代次数之间的函数曲线下降速度最快。有定步长和可变步长两种策略。
Feature Scaling
随机梯度下降
普通的梯度下降算法在更新回归系数时要遍历整个数据集,是一种批处理方法,这样训练数据特别忙庞大时,可能出现如下问题:
1)收敛过程可能非常慢;
2)如果误差曲面上有多个局极小值,那么不能保证这个过程会找到全局最小值。
为了解决上面的问题,实际中我们应用的是梯度下降的一种变体被称为随机梯度下降。
上面公式中的误差是针对于所有训练样本而得到的,而随机梯度下降的思想是根据每个单独的训练样本来更新权值,这样我们上面的梯度公式就变成了:

经过推导后,我们就可以得到最终的权值更新的公式:
有了上面权重的更新公式后,我们就可以通过输入大量的实例样本,来根据我们预期的结果不断地调整权值,从而最终得到一组权值使得我们的算法能够对一个新的样本输入得到正确的或无限接近的结果。
这里做一个对比
设代价函数为
批量梯度下降
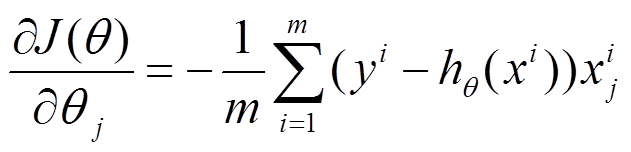
参数更新为:
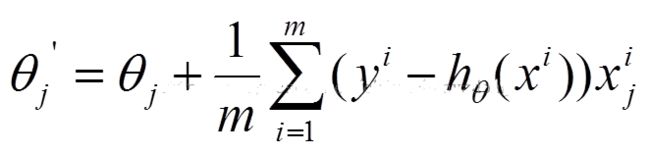
i是样本编号下标,j是样本维数下标,m为样例数目,n为特征数目。所以更新一个θj需要遍历整个样本集

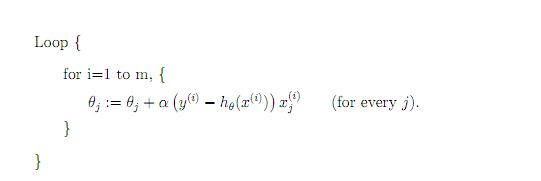
随机梯度下降
参数更新为:

i是样本编号下标,j是样本维数下标,m为样例数目,n为特征数目。所以更新一个θj只需要一个样本就可以。
Batch Gradient Descent: You need to run over every training example before doing an update, which means that if you have a large dataset, you might spend much time on getting something that works.
Stochastic gradient descent, on the other hand, does updates every time it finds a training example, however, since it only uses one update, it may never converge, although you can still be pretty close to the minimum.
随机梯度下降的样本学习顺序可以这样来:
第一次打乱样本集D原来的顺序,得到D1,然后按顺序在D1上一个一个学习,所有样本学习完之后,再打乱D的顺序,得到D2,然后按顺序在D1上一个一个学习。。。
还有一种mini-batch gradient descent,比如batch是50,总样本是1000个,那么每50个样本就更新一次参数,跑完一遍总样本可以更新20次参数。
普通梯度下降
这里的error和h是向量,m、n分别是样本数量、样本维数
<span style="font-size:18px;">def gradAscent(dataMatIn, classLabels):
dataMatrix = mat(dataMatIn) #convert to NumPy matrix
labelMat = mat(classLabels).transpose() #convert to NumPy matrix
m,n = shape(dataMatrix)
alpha = 0.001
maxCycles = 500
weights = ones((n,1))
for k in range(maxCycles): #heavy on matrix operations
h = sigmoid(dataMatrix*weights) #matrix mult
error = (labelMat - h) #vector subtraction
weights = weights + alpha * dataMatrix.transpose()* error #matrix mult
return weights</span>
<span style="font-size:18px;">def stocGradAscent0(dataMatrix, classLabels):
m,n = shape(dataMatrix)
alpha = 0.01
weights = ones(n) #initialize to all ones
for i in range(m):
h = sigmoid(sum(dataMatrix[i]*weights))
error = classLabels[i] - h
weights = weights + alpha * error * dataMatrix[i]
return weights</span>
改进的随机梯度下降,m、n分别是样本数量、样本维数
<span style="font-size:18px;">def stocGradAscent1(dataMatrix, classLabels, numIter=150):
m,n = shape(dataMatrix)
weights = ones(n) #initialize to all ones
for j in range(numIter):
dataIndex = range(m)
for i in range(m):
alpha = 4/(1.0+j+i)+0.0001 #apha decreases with iteration, does not
randIndex = int(random.uniform(0,len(dataIndex)))#随机选取样本
h = sigmoid(sum(dataMatrix[randIndex]*weights))
error = classLabels[randIndex] - h
weights = weights + alpha * error * dataMatrix[randIndex]
del(dataIndex[randIndex])#删除所选的样本
return weights</span>
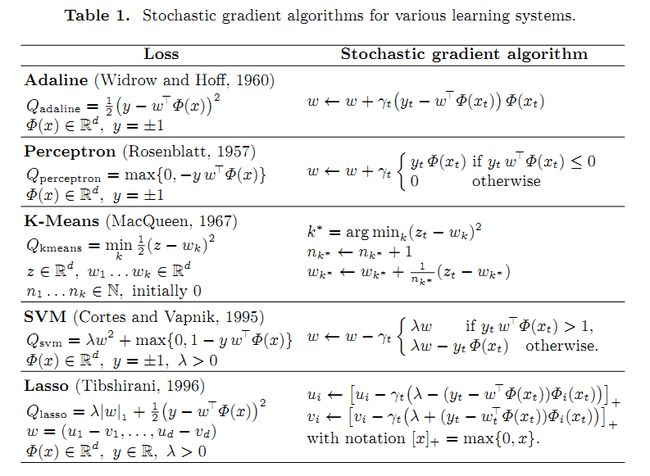
下面是一些机器学习算法的随机梯度下降求解模型
与牛顿法的比较
梯度下降法是用来求函数值最小处的参数值,而牛顿法是用来求函数值为0处的参数值,这两者的目的初看是感觉有所不同,但是再仔细观察下牛顿法是求函数值为0时的情况,如果此时的函数是某个函数A的导数,则牛顿法也算是求函数A的最小值(当然也有可能是最大值)了,因此这两者方法目的还是具有相同性的。牛顿法的参数求解也可以用矢量的形式表示,表达式中有hession矩阵和一元导函数向量。
首先的不同之处在于梯度法中需要选择学习速率,而牛顿法不需要选择任何参数。第二个不同之处在于梯度法需要大量的迭代次数才能找到最小值,而牛顿法只需要少量的次数便可完成。但是梯度法中的每一次迭代的代价要小,其复杂度为O(n),而牛顿法的每一次迭代的代价要大,为O(n^3)。因此当特征的数量n比较小时适合选择牛顿法,当特征数n比较大时,最好选梯度法。这里的大小以n等于1000为界来计算。
总结
梯度下降与随机梯度下降是很多机器学习算法求解的基石,可以说是非常重要的。要求弄懂其中的数学原理,随手推导出公式,并能应用。
http://www.cnblogs.com/murongxixi/p/3467365.html
http://www.cnblogs.com/murongxixi/p/4254788.html
Stochastic Gradient Descent Training for L1-regularized Log-linear Models with Cumulative Penalty