hdu 4858 项目管理(图的分治)
项目管理
两个节点间可能有多条边,不过一条边的两端必然是不同的节点。
每个节点都有一个能量值。
现在我们要编写一个项目管理软件,这个软件呢有两个操作:
1.给某个项目的能量值加上一个特定值。
2.询问跟一个项目相邻的项目的能量值之和。(如果有多条边就算多次,比如a和b有2条边,那么询问a的时候b的权值算2次)。
然后对于每个测试数据,第一行有两个整数n(1 <= n <= 100000)和m(1 <= m <= n + 10),分别表示点数和边数。
然后m行,每行两个数a和b,表示a和b之间有一条边。
然后一个整数Q。
然后Q行,每行第一个数cmd表示操作类型。如果cmd为0,那么接下来两个数u v表示给项目u的能量值加上v(0 <= v <= 100)。
如果cmd为1,那么接下来一个数u表示询问u相邻的项目的能量值之和。
所有点从1到n标号。
1 3 2 1 2 1 3 6 0 1 15 0 3 4 1 1 1 3 0 2 33 1 2
4 15 15
共有m条边 设k=sqrt(m) 若一个点的度(即与之有边连接点的个数)小于k成为轻点,剩下的(大于等于k)称为重点
对点i来说degree[i]记录点的度
重点的个数 <=2*m/sqrt(m)=2*sqrt(m)
对于一个点i,A[i]记录这个点的值
对于重点i,sum[i]记录其答案,
对于轻点i,sum[i]无任何作用,轻点的答案通过对所有与轻点相连的点的值求和直接得到
题目可分为三个过程
1.构造图
对点i来说
如果i点是轻点,则记录所有与他相连的点到point[i]中
如果i点是重点,则记录所有与他相连的重点到point[i]中
2.更新图
对点i来说
如果i点是轻点,则更新point[i]中所有重点,即为更新所有与之相连的重点的sum值
如果i点是重点,则更新point[i]中所有点,也即为更新所有与之相连的重点的sum值
3.查询点
对点i来说
如果i点是轻点,则累加所有与之相连的点的值直接求出解
如果i点是重点,则直接输出sum[i],因为sum[i]的值已经更新过了(与重点相连的点有两种——轻点与重点,在2.更新图过程中都完成了更新)
稍微计算一下,就能发现此种方法在点多且密集的情况下,比基础方法快了很多
设轻点个数为N轻,重点个数为N重,轻点所相连点的个数为SIZE轻,重点所相连的个数为SIZE重,重点所相连的重点个数为SIZE重重(重点的个数 <=2*m/sqrt(m)=2*sqrt(m)=2*k=2*SIZE轻)
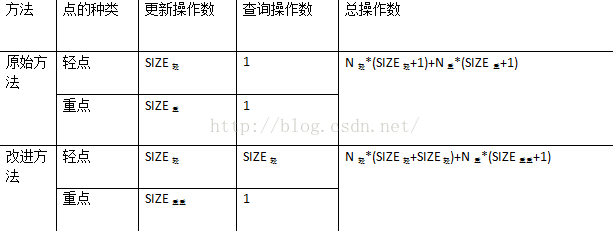
忽略N轻与N重
故比较SIZE重与SIZE轻+SIZE重重(SIZE重重<=2*k约等于2*SIZE轻)
左式=m 右式=3*sqrt(m)
在点多且边密集的图中,显然改进方法的速度有了很大的提升
#include<cmath>
#include<cstdio>
#include<cstring>
#include<vector>
using namespace std;
const int MAX=100105;
struct node
{
int u,v;
}edge[MAX];;
int k;
vector<int>point[MAX];
int A[MAX],sum[MAX],degree[MAX];
void update(int x,int d)
{
int i;
A[x]+=d;
for(i=0;i<point[x].size();i++)
if(degree[point[x][i]]>=k)
sum[point[x][i]]+=d;
}
int query(int x)
{
if(degree[x]<k)
{
int ans=0;
for(int i=0;i<point[x].size();i++)
ans+=A[point[x][i]];
return ans;
}
else
return sum[x];
}
int main()
{
int T,n,m,i,u,v,Q,cmd,a,b;
scanf("%d",&T);
while(T--)
{
scanf("%d%d",&n,&m);
memset(A,0,sizeof(A));
memset(degree,0,sizeof(degree));
memset(sum,0,sizeof(sum));
for(i=1;i<=n;i++)
point[i].clear();
for(i=1;i<=m;i++)
{
scanf("%d%d",&edge[i].u,&edge[i].v);
degree[edge[i].u]++;
degree[edge[i].v]++;
}
k=sqrt(m);
for(i=1;i<=m;i++)
{
u=edge[i].u;
v=edge[i].v;
if(degree[u]<k)
point[u].push_back(v);
else if(degree[v]>=k)
point[u].push_back(v);
if(degree[v]<k)
point[v].push_back(u);
else if(degree[u]>=k)
point[v].push_back(u);
}
scanf("%d",&Q);
while(Q--)
{
scanf("%d",&cmd);
if(cmd==0)
{
scanf("%d%d",&a,&b);
update(a,b);
}
else
{
scanf("%d",&a);
printf("%d\n",query(a));
}
}
}
return 0;
}
对点i来说,如果一个点是轻点,则记录所有与他相连的点到point[i]中
如果一个点是重点,则记录所有与他相连的重点到point[i]中