网络最大流问题算法小结
通过 USACO 4.2.1 Ditch 学习一下最大流算法 。可惜它给的测试数据几乎没有任何杀伤力,后面测试时我们采用 DD_engi 写的程序生成的加强版数据。
总体上来说,最大流算法分为两大类:增广路 (Augmenting Path) 和预流推进重标号 (Push Relabel) 。也有算法同时借鉴了两者的长处,如 Improved SAP 。本篇主要介绍增广路类算法,思想、复杂度及实际运行效率比较,并试图从中选择一种兼顾代码复杂度和运行效率的较好方案。以下我们将会看到,有时理论分析的时间复杂度并不能很好的反映一种算法的实际效率。
1. Ford - Fulkerson 方法
所有增广路算法的基础都是 Ford - Fulkerson 方法。称之为方法而不是算法是因为 Ford - Fulkerson 只提供了一类思想,在此之上的具体操作可有不同的实现方案。
给定一个有向网络 G(V,E) 以及源点 s 终点 t ,FF 方法描述如下:
Ford-Fulkerson 方法 (G,s,t) 1 将各边上流量 f 初始化为 0 2 while 存在一条增广路径 p 3 do 沿路径 p 增广流量 f 4 return f
假设有向网络 G 中边 (i,j) 的容量为 c(i,j) ,当前流量为 f(i,j) ,则此边的剩余流量即为 r(i,j) = c(i,j) - f(i,j) ,其反向边的剩余流量为 r(j,i) = f(i,j) 。有向网中所有剩余流量 r(i,j) > 0 的边构成残量网络 Gf ,增广路径p即是残量网络中从源点 s 到终点 t 的路径。
沿路径 p 增广流量 f 的操作基本都是相同的,各算法的区别就在于寻找增广路径 p 的方法不同。例如可以寻找从 s 到 t 的最短路径,或者流量最大的路径。
2. Edmonds - Karp 算法
Shortest Augmenting Path (SAP) 是每次寻找最短增广路的一类算法,Edmonds - Karp 算法以及后来著名的 Dinic 算法都属于此。SAP 类算法可统一描述如下:
Shortest Augmenting Path 1 x <-- 0 2 while 在残量网络 Gx 中存在增广路 s ~> t 3 do 找一条最短的增广路径 P 4 delta <-- min{rij:(i,j) 属于 P} 5 沿 P 增广 delta 大小的流量 6 更新残量网络 Gx 7 return x
在无权边的有向图中寻找最短路,最简单的方法就是广度优先搜索 (BFS),E-K 算法就直接来源于此。每次用一遍 BFS 寻找从源点 s 到终点 t 的最短路作为增广路径,然后增广流量 f 并修改残量网络,直到不存在新的增广路径。
E-K 算法的时间复杂度为 O(VE2),由于 BFS 要搜索全部小于最短距离的分支路径之后才能找到终点,因此可以想象频繁的 BFS 效率是比较低的。实践中此算法使用的机会较少。
3. Dinic 算法
BFS 寻找终点太慢,而 DFS 又不能保证找到最短路径。1970年 Dinic 提出一种思想,结合了 BFS 与 DFS 的优势,采用构造分层网络的方法可以较快找到最短增广路,此算法又称为阻塞流算法 (Blocking Flow Algorithm)。
首先定义分层网络 AN(f)。在残量网络中从源点 s 起始进行 BFS,这样每个顶点在 BFS 树中会得到一个距源点 s 的距离 d,如 d(s) = 0,直接从 s 出发可到达的点距离为 1,下一层距离为2 ... 。称所有具有相同距离的顶点位于同一层,在分层网络中,只保留满足条件 d(i) + 1 = d(j) 的边,这样在分层网络中的任意路径就成为到达此顶点的最短路径。
Dinic 算法每次用一遍 BFS 构建分层网络 AN(f),然后在 AN(f) 中一遍 DFS 找到所有到终点 t 的路径增广;之后重新构造 AN(f),若终点 t 不在 AN(f) 中则算法结束。DFS 部分算法可描述如下:
1 p <-- s 2 while s 的出度 > 0 do 3 u <-- p.top 4 if u != t then 5 if u 的出度 > 0 then 6 设 (u,v) 为 AN(f) 中一条边 7 p <-- p, v 8 else 9 从 p 和 AN(f) 中删除点 u 以及和 u 连接的所有边 10 else 11 沿 p 增广 12 令 p.top 为从 s 沿 p 可到达的最后顶点 13 end while
实际代码中不必真的用一个图来存储分层网络,只需保存每个顶点的距离标号并在 DFS 时判断 dist[i] + 1 = dist[j] 即可。Dinic 的时间复杂度为 O(V2E)。由于较少的代码量和不错的运行效率,Dinic 在实践中比较常用。具体代码可参考 DD_engi 网络流算法评测包中的标程,这几天 dinic 算法的实现一共看过和比较过将近 10 个版本了,DD 写的那个在效率上是数一数二的,逻辑上也比较清晰。
4. Improved SAP 算法
本次介绍的重头戏。通常的 SAP 类算法在寻找增广路时总要先进行 BFS,BFS 的最坏情况下复杂度为 O(E),这样使得普通 SAP 类算法最坏情况下时间复杂度达到了 O(VE2)。为了避免这种情况,Ahuja 和 Orlin 在1987年提出了Improved SAP 算法,它充分利用了距离标号的作用,每次发现顶点无出弧时不是像 Dinic 算法那样到最后进行 BFS,而是就地对顶点距离重标号,这样相当于在遍历的同时顺便构建了新的分层网络,每轮寻找之间不必再插入全图的 BFS 操作,极大提高了运行效率。国内一般把这个算法称为 SAP...显然这是不准确的,毕竟从字面意思上来看 E-K 和 Dinic 都属于 SAP,我还是习惯称为 ISAP 或改进的 SAP 算法。
与 Dinic 算法不同,ISAP 中的距离标号是每个顶点到达终点 t 的距离。同样也不需显式构造分层网络,只要保存每个顶点的距离标号即可。程序开始时用一个反向 BFS 初始化所有顶点的距离标号,之后从源点开始,进行如下三种操作:(1)当前顶点 i 为终点时增广 (2) 当前顶点有满足 dist[i] = dist[j] + 1 的出弧时前进 (3) 当前顶点无满足条件的出弧时重标号并回退一步。整个循环当源点 s 的距离标号 dist[s] >= n 时结束。对 i 点的重标号操作可概括为 dist[i] = 1 + min{dist[j] : (i,j)属于残量网络Gf}。具体算法描述如下:
algorithm Improved-Shortest-Augmenting-Path 1 f <-- 0 2 从终点 t 开始进行一遍反向 BFS 求得所有顶点的起始距离标号 d(i) 3 i <-- s 4 while d(s) < n do 5 if i = t then // 找到增广路 6 Augment 7 i <-- s // 从源点 s 开始下次寻找 8 if Gf 包含从 i 出发的一条允许弧 (i,j) 9 then Advance(i) 10 else Retreat(i) // 没有从 i 出发的允许弧则回退 11 return f procedure Advance(i) 1 设 (i,j) 为从 i 出发的一条允许弧 2 pi(j) <-- i // 保存一条反向路径,为回退时准备 3 i <-- j // 前进一步,使 j 成为当前结点 procedure Retreat(i) 1 d(i) <-- 1 + min{d(j):(i,j)属于残量网络Gf} // 称为重标号的操作 2 if i != s 3 then i <-- pi(i) // 回退一步 procedure Augment 1 pi 中记录为当前找到的增广路 P 2 delta <-- min{rij:(i,j)属于P} 3 沿路径 P 增广 delta 的流量 4 更新残量网络 Gf
算法中的允许弧是指在残量网络中满足 dist[i] = dist[j] + 1 的弧。Retreat 过程中若从 i 出发没有弧属于残量网络 Gf 则把顶点距离重标号为 n 。
虽然 ISAP 算法时间复杂度与 Dinic 相同都是 O(V2E),但在实际表现中要好得多。要提的一点是关于 ISAP 的一个所谓 GAP 优化。由于从 s 到 t 的一条最短路径的顶点距离标号单调递减,且相邻顶点标号差严格等于1,因此可以预见如果在当前网络中距离标号为 k (0 <= k < n) 的顶点数为 0,那么可以知道一定不存在一条从 s 到 t 的增广路径,此时可直接跳出主循环。在我的实测中,这个优化是绝对不能少的,一方面可以提高速度,另外可增强 ISAP 算法时间上的稳定性,不然某些情况下 ISAP 会出奇的费时,而且大大慢于 Dinic 算法。相对的,初始的一遍 BFS 却是可有可无,因为 ISAP 可在循环中自动建立起分层网络。实测加不加 BFS 运行时间差只有 5% 左右,代码量可节省 15~20 行。
5. 最大容量路径算法 (Maximum Capacity Path Algorithm)
1972年还是那个 E-K 组合提出的另一种最大流算法。每次寻找增广路径时不找最短路径,而找容量最大的。可以预见,此方法与 SAP 类算法相比可更快逼近最大流,从而降低增广操作的次数。实际算法也很简单,只用把前面 E-K 算法的 BFS 部分替换为一个类 Dijkstra 算法即可。USACO 4.2 节的说明详细介绍了此算法,这里就不详述了。
时间复杂度方面。BFS 是 O(E),简单 Dijkstra 是 O(V2),因此效果可想而知。但提到 Dijkstra 就不能不提那个 Heap 优化,虽然 USACO 的算法例子中没有用 Heap ,我自己还是实现了一个加 Heap 的版本,毕竟 STL 的优先队列太好用了不加白不加啊。效果也是非常明显的,但比起 Dinic 或 ISAP 仍然存在海量差距,这里就不再详细介绍了。
6. Capacity Scaling Algorithm
不知道怎么翻比较好,索性就这么放着吧。叫什么的都有,容量缩放算法、容量变尺度算法等,反正就那个意思。类似于二分查找的思想,寻找增广路时不必非要局限于寻找最大容量,而是找到一个可接受的较大值即可,一方面有效降低寻找增广路时的复杂度,另一方面增广操作次数也不会增加太多。时间复杂度 O(E2logU) 实际效率嘛大约稍好于最前面 BFS 的 E-K 算法,稀疏图时表现较优,但仍然不敌 Dinic 与 ISAP。
7. 算法效率实测!
重头戏之二,虽然引用比较多,哎~
首先引用此篇强文 《Maximum Flow: Augmenting Path Algorithms Comparison》
对以上算法在稀疏图、中等稠密图及稠密图上分别进行了对比测试。直接看结果吧:
稀疏图:
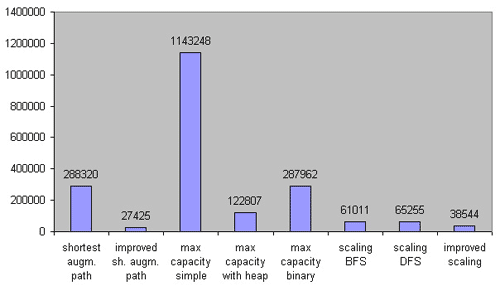
ISAP 轻松拿下第一的位置,图中最左边的 SAP 应该指的是 E-K 算法,这里没有比较 Dinic 算法是个小遗憾吧,他把 Dinic 与 SAP 归为一类了。最大流量路径的简单 Dijkstra 实现实在是太失败了 - -,好在 Heap 优化后还比较能接受……可以看到 Scaling 算法也有不错的表现。
中等稠密图:
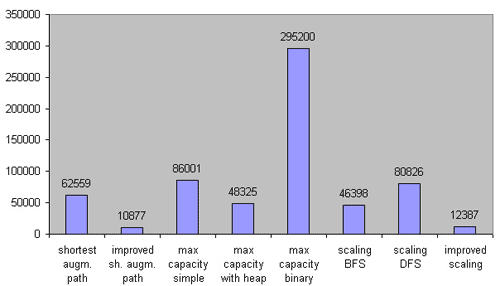
ISAP 依然领先。最大流量算法依然不太好过……几个 Scaling 类算法仍然可接受。
稠密图:

ISAP……你无敌了!这次可以看出 BFS 的 Scaling 比 DFS 实现好得多,而且几乎与 Improved Scaling 不相上下,代码量却差不少。看来除 ISAP 外 BFS Scaling 也是个不错的选择。
最后补个我自己实测的图,比较算法有很多是 DD 网络流算法评测包里的标程,评测系统用的 Cena,评测数据为 DD ditch 数据生成程序生成的加强版数据:

我一共写了 7 个版本的 ISAP ,Dinic 算法也写了几个递归版的但效率都不高,只放上来一个算了。从上图来看似乎 ISAP 全面超越了号称最大流最快速算法的 HLPP,但在另外一台机器上测试结果与此却不大相同,有时 ISAP 与 HLPP 基本持平,有时又稍稍慢一些。在这种差距非常小的情况下似乎编译器的效果也比较明显。那个 HLPP 是用 PASCAL 写的,我不知在 Win32 平台下编译代码效率如何,至少我的几个 ISAP 用 VC2008 + SP1 编译比用 g++ 要强不少,也可能是参数设置的问题。
不过这些都是小事,关键是见证了 ISAP 的实际效率。从上面可以看出不加 GAP 优化的 ISAP 有几个测试点干脆无法通过,而不加 BFS 却无甚大影响,递归与非递归相差在 7% 左右的样子。综合以上表现,推荐采用 ISAP 不加 BFS,非递归 + GAP 优化的写法,Ditch 这道题一共也才 80 行左右代码。要提的一点是 GAP 优化用递归来表现的话不如 while 循环来得直接。另外,看起来 HLPP 表现确实很优秀,有机会也好好研究一下吧,预流推进重标号算法也是一大类呢……
最后附上一个 ISAP + GAP + BFS 的非递归版本代码,网络采用邻接表 + 反向弧指针:
1 #include<cstdio> 2 #include<memory> 3 using namespace std; 4 5 const int maxnode = 1024; 6 const int infinity = 2100000000; 7 8 struct edge{ 9 int ver; // vertex 10 int cap; // capacity 11 int flow; // current flow in this arc 12 edge *next; // next arc 13 edge *rev; // reverse arc 14 edge(){} 15 edge(int Vertex, int Capacity, edge *Next) 16 :ver(Vertex), cap(Capacity), flow(0), next(Next), rev((edge*)NULL){} 17 void* operator new(size_t, void *p){ 18 return p; 19 } 20 }*Net[maxnode]; 21 int dist[maxnode]= {0}, numbs[maxnode] = {0}, src, des, n; 22 23 void rev_BFS(){ 24 int Q[maxnode], head = 0, tail = 0; 25 for(int i=1; i<=n; ++i){ 26 dist[i] = maxnode; 27 numbs[i] = 0; 28 } 29 30 Q[tail++] = des; 31 dist[des] = 0; 32 numbs[0] = 1; 33 while(head != tail){ 34 int v = Q[head++]; 35 for(edge *e = Net[v]; e; e = e->next){ 36 if(e->rev->cap == 0 || dist[e->ver] < maxnode)continue; 37 dist[e->ver] = dist[v] + 1; 38 ++numbs[dist[e->ver]]; 39 Q[tail++] = e->ver; 40 } 41 } 42 } 43 44 int maxflow(){ 45 int u, totalflow = 0; 46 edge *CurEdge[maxnode], *revpath[maxnode]; 47 for(int i=1; i<=n; ++i)CurEdge[i] = Net[i]; 48 u = src; 49 while(dist[src] < n){ 50 if(u == des){ // find an augmenting path 51 int augflow = infinity; 52 for(int i = src; i != des; i = CurEdge[i]->ver) 53 augflow = min(augflow, CurEdge[i]->cap); 54 for(int i = src; i != des; i = CurEdge[i]->ver){ 55 CurEdge[i]->cap -= augflow; 56 CurEdge[i]->rev->cap += augflow; 57 CurEdge[i]->flow += augflow; 58 CurEdge[i]->rev->flow -= augflow; 59 } 60 totalflow += augflow; 61 u = src; 62 } 63 64 edge *e; 65 for(e = CurEdge[u]; e; e = e->next) 66 if(e->cap > 0 && dist[u] == dist[e->ver] + 1)break; 67 if(e){ // find an admissible arc, then Advance 68 CurEdge[u] = e; 69 revpath[e->ver] = e->rev; 70 u = e->ver; 71 } else { // no admissible arc, then relabel this vertex 72 if(0 == (--numbs[dist[u]]))break; // GAP cut, Important! 73 CurEdge[u] = Net[u]; 74 int mindist = n; 75 for(edge *te = Net[u]; te; te = te->next) 76 if(te->cap > 0)mindist = min(mindist, dist[te->ver]); 77 dist[u] = mindist + 1; 78 ++numbs[dist[u]]; 79 if(u != src) 80 u = revpath[u]->ver; // Backtrack 81 } 82 } 83 return totalflow; 84 } 85 86 int main(){ 87 int m, u, v, w; 88 freopen("ditch.in", "r", stdin); 89 freopen("ditch.out", "w", stdout); 90 while(scanf("%d%d", &m, &n) != EOF){ // POJ 1273 need this while loop 91 edge *buffer = new edge[2*m]; 92 edge *data = buffer; 93 src = 1; des = n; 94 while(m--){ 95 scanf("%d%d%d", &u, &v, &w); 96 Net[u] = new((void*) data++) edge(v, w, Net[u]); 97 Net[v] = new((void*) data++) edge(u, 0, Net[v]); 98 Net[u]->rev = Net[v]; 99 Net[v]->rev = Net[u]; 100 } 101 rev_BFS(); 102 printf("%d\n", maxflow()); 103 delete [] buffer; 104 } 105 return 0; 106 }
[转] http://dantvt.is-programmer.com/posts/7974.html