Linux服务器多进程模型
http://blog.csdn.net/winlinvip/article/details/7764526
Linux多进程服务器真的很给力,赞一个!
Linux多进程一般是master负责侦听,worker接受和伺服client。
一个使用了以下技术的多进程模型:
1. sigset:安全信号,信号屏蔽和接受。
2. epoll:异步io模型。
master进程使用信号模型,侦听用户信号和程序信号,并和worker交流。它的主循环是sigsuspend。
worker进程使用事件模型,使用epoll_wait等待事件,同时他也接受信号(信号会中断epoll_wait)。
- // mpserver —— multiple processes server
- #include <stdio.h>
- #include <stdlib.h>
- #include <iostream>
- using namespace std;
- #include <unistd.h>
- #include <signal.h>
- #include <sys/types.h>
- #include <sys/socket.h>
- #include <netinet/in.h>
- #include <sys/wait.h>
- #include <sys/epoll.h>
- #include <string.h>
- #include <errno.h>
- #define err_exit(msg) cout << "[error] " << msg << endl; exit(1)
- struct UserOptions{
- int port;
- int num_processes;
- };
- void discovery_user_options(int argc, char** argv, UserOptions& options){
- if(argc <= 2){
- cout << "Usage: " << argv[0] << " <port> <num_processes>" << endl
- << "port: the port to listen" << endl
- << "num_processes: the num to start processes. if 0, use single process mode" << endl;
- exit(1);
- }
- options.port = atoi(argv[1]);
- options.num_processes = atoi(argv[2]);
- }
- int listen_server_socket(UserOptions& options){
- int serverfd = socket(AF_INET, SOCK_STREAM, 0);
- if(serverfd == -1){
- err_exit("init socket error!");
- }
- cout << "init socket success! #" << serverfd << endl;
- int reuse_socket = 1;
- if(setsockopt(serverfd, SOL_SOCKET, SO_REUSEADDR, &reuse_socket, sizeof(int)) == -1){
- err_exit("setsockopt reuse-addr error!");
- }
- cout << "setsockopt reuse-addr success!" << endl;
- sockaddr_in addr;
- addr.sin_family = AF_INET;
- addr.sin_port = htons(options.port);
- addr.sin_addr.s_addr = INADDR_ANY;
- if(bind(serverfd, (const sockaddr*)&addr, sizeof(sockaddr_in)) == -1){
- err_exit("bind socket error!");
- }
- cout << "bind socket success!" << endl;
- if(listen(serverfd, 10) == -1){
- err_exit("listen socket error!");
- }
- cout << "listen socket success! " << options.port << endl;
- return serverfd;
- }
- void signal_handler(int signo){
- cout << "#" << getpid() << " get a signal:";
- bool do_exit = false;
- switch(signo){
- case SIGCHLD:
- cout << "SIGCHLD";
- int status;
- while(waitpid(0, &status, WNOHANG) > 0){
- }
- break;
- case SIGALRM:
- cout << "SIGALRM";
- break;
- case SIGIO:
- cout << "SIGIO";
- break;
- case SIGINT:
- cout << "SIGINT";
- do_exit = true;
- break;
- case SIGHUP:
- cout << "SIGHUP";
- do_exit = true;
- break;
- case SIGTERM:
- cout << "SIGTERM";
- do_exit = true;
- break;
- case SIGQUIT:
- cout << "SIGQUIT";
- do_exit = true;
- break;
- case SIGUSR1:
- cout << "SIGUSR1";
- break;
- case SIGUSR2:
- cout << "SIGUSR2";
- break;
- }
- cout << "!" << endl;
- if(do_exit){
- exit(0);
- }
- }
- void register_signal_handler_imp(int signum, void (*handler)(int)){
- struct sigaction action;
- action.sa_handler = handler;
- sigemptyset(&action.sa_mask);
- //action.sa_flags = 0;
- if(sigaction(signum, &action, NULL) == -1){
- err_exit("register signal handler failed!");
- }
- }
- void register_signal_handler(){
- register_signal_handler_imp(SIGCHLD, signal_handler);
- register_signal_handler_imp(SIGALRM, signal_handler);
- register_signal_handler_imp(SIGIO, signal_handler);
- register_signal_handler_imp(SIGINT, signal_handler);
- register_signal_handler_imp(SIGHUP, signal_handler);
- register_signal_handler_imp(SIGTERM, signal_handler);
- register_signal_handler_imp(SIGQUIT, signal_handler);
- register_signal_handler_imp(SIGUSR1, signal_handler);
- register_signal_handler_imp(SIGUSR2, signal_handler);
- cout << "register signal handler success!" << endl;
- }
- void block_specified_signals(){
- sigset_t set;
- sigemptyset(&set);
- sigaddset(&set, SIGCHLD);
- sigaddset(&set, SIGALRM);
- sigaddset(&set, SIGIO);
- sigaddset(&set, SIGINT);
- sigaddset(&set, SIGHUP);
- sigaddset(&set, SIGTERM);
- sigaddset(&set, SIGQUIT);
- sigaddset(&set, SIGUSR1);
- sigaddset(&set, SIGUSR2);
- if(sigprocmask(SIG_BLOCK, &set, NULL) == -1){
- err_exit("sigprocmask block signal failed!");
- }
- cout << "sigprocmask block signal success!" << endl;
- }
- void unblock_all_signals(){
- sigset_t set;
- sigemptyset(&set);
- // the master process block all signals, we unblock all for we use epoll to wait events.
- if(sigprocmask(SIG_SETMASK, &set, NULL) == -1){
- err_exit("sigprocmask block signal failed!");
- }
- cout << "sigprocmask block signal success!" << endl;
- }
- void epoll_add_event(int ep, int fd){
- epoll_event ee;
- ee.events = EPOLLIN;
- ee.data.fd = fd;
- if(epoll_ctl(ep, EPOLL_CTL_ADD, fd, &ee) == -1){
- err_exit("epoll add event failed!");
- }
- cout << "epoll add fd success: #" << fd << endl;
- }
- void epoll_remove_event(int ep, int fd){
- if(epoll_ctl(ep, EPOLL_CTL_DEL, fd, NULL) == -1){
- err_exit("epoll remove event failed! fd=" << fd << ", errno=0x" << hex << errno << dec << " " << strerror(errno));
- }
- cout << "epoll remove fd success: #" << fd << endl;
- }
- void close_client(int ep, int fd){
- cout << "the client dead, remove it: #" << fd << endl;
- epoll_remove_event(ep, fd);
- close(fd);
- }
- void worker_get_event(int ep, int serverfd, epoll_event& active){
- int fd = active.data.fd;
- // server listening socket event.
- if(fd == serverfd){
- int client = accept(serverfd, NULL, 0);
- if(client == -1){
- err_exit("accept client socket error!");
- }
- cout << "get a client: #" << client << endl;
- epoll_add_event(ep, client);
- return;
- }
- // client event.
- if((active.events & EPOLLHUP) == EPOLLHUP || (active.events & EPOLLERR) == EPOLLERR){
- cout << "get a EPOLLHUP or EPOLLERR event from client #" << fd << endl;
- close_client(ep, fd);
- return;
- }
- if((active.events & EPOLLIN) == EPOLLIN){
- if(true){
- cout << "get a EPOLLIN event from client #" << fd << endl;
- char buf[1024];
- memset(buf, 0, sizeof(buf));
- if(recv(fd, buf, sizeof(buf), 0) <= 0){
- close_client(ep, fd);
- return;
- }
- cout << "recv from client: " << buf << endl;
- }
- if(true){
- char msg[] = "hello, server ping!";
- if(send(fd, msg, sizeof(msg), 0) <= 0){
- close_client(ep, fd);
- return;
- }
- }
- return;
- }
- }
- void worker_process_cycle(int serverfd){
- cout << "start worker process cycle" << endl;
- unblock_all_signals();
- int ep = epoll_create(1024);
- if(ep == -1){
- err_exit("epoll_create failed!");
- }
- cout << "epoll create success!" << endl;
- epoll_add_event(ep, serverfd);
- for(;;){
- epoll_event events[1024];
- int incoming = epoll_wait(ep, events, 1024, -1);
- if(incoming == -1){
- break;
- }
- for(int i = 0; i < incoming; i++){
- worker_get_event(ep, serverfd, events[i]);
- }
- }
- cout << "worker process exited" << endl;
- close(ep);
- }
- void start_worker_process(int serverfd){
- pid_t pid = fork();
- if(pid == -1){
- err_exit("fork process failed");
- }
- if(pid == 0){
- worker_process_cycle(serverfd);
- exit(0);
- }
- cout << "fork process success: #" << pid << endl;
- }
- int main(int argc, char** argv){
- register_signal_handler();
- block_specified_signals();
- //sleep(3);
- UserOptions options;
- discovery_user_options(argc, argv, options);
- int serverfd = listen_server_socket(options);
- for(int i = 0; i < options.num_processes; i++){
- start_worker_process(serverfd);
- }
- if(options.num_processes == 0){
- worker_process_cycle(serverfd);
- }
- sigset_t set;
- sigemptyset(&set);
- for(;;){
- sigsuspend(&set);
- }
- return 0;
- }
- // mpclient —— multiple processes client
- #include <stdio.h>
- #include <stdlib.h>
- #include <iostream>
- using namespace std;
- #include <unistd.h>
- #include <signal.h>
- #include <sys/types.h>
- #include <sys/socket.h>
- #include <netinet/in.h>
- #include <arpa/inet.h>
- #include <string.h>
- #define err_exit(msg) cout << "[error] " << msg << endl; exit(1)
- struct UserOptions{
- char* server_ip;
- int port;
- int num_processes;
- };
- void discovery_user_options(int argc, char** argv, UserOptions& options){
- if(argc <= 2){
- cout << "Usage: " << argv[0] << " <server_ip> <port> <num_processes>" << endl
- << "server_ip: the ip address of server" << endl
- << "port: the port to connect at" << endl
- << "num_processes: the num to start processes. if 0, use single process mode" << endl;
- exit(1);
- }
- options.server_ip = argv[1];
- options.port = atoi(argv[2]);
- options.num_processes = atoi(argv[3]);
- }
- int connect_server_socket(UserOptions& options){
- int clientfd = socket(AF_INET, SOCK_STREAM, 0);
- if(clientfd == -1){
- err_exit("init socket error!");
- }
- cout << "init socket success!" << endl;
- sockaddr_in addr;
- addr.sin_family = AF_INET;
- addr.sin_port = htons(options.port);
- addr.sin_addr.s_addr = inet_addr(options.server_ip);
- if(connect(clientfd, (const sockaddr*)&addr, sizeof(sockaddr_in)) == -1){
- err_exit("connect socket error!");
- }
- cout << "connect socket success!" << endl;
- return clientfd;
- }
- int main(int argc, char** argv){
- UserOptions options;
- discovery_user_options(argc, argv, options);
- int* fds = new int[options.num_processes];
- for(int i = 0; i < options.num_processes; i++){
- fds[i] = connect_server_socket(options);
- }
- bool do_loop = true;
- while(do_loop){
- for(int i = 0; i < options.num_processes; i++){
- int fd = fds[i];
- if(true){
- char msg[] = "hello, client ping!";
- if(send(fd, msg, sizeof(msg), 0) <= 0){
- close(fd);
- do_loop = false;
- break;
- }
- }
- if(true){
- char buf[1024];
- memset(buf, 0, sizeof(buf));
- if(recv(fd, buf, sizeof(buf), 0) <= 0){
- close(fd);
- do_loop = false;
- break;
- }
- cout << "recv from server: " << buf << endl;
- }
- sleep(3);
- }
- }
- delete[] fds;
- return 0;
- }
master启动的主要过程:
1. 注册信号处理函数:sigaction。
2. 屏蔽所有关心的信号,让内核暂时保留信号,不要发给程序,因为这时候程序不系统被打断。
3. 侦听端口。
4. 启动worker进程。
5. 等待信号的到来:sigsuspend。
worker启动的主要过程:
1. 取消信号的屏蔽。因为这时候worker拷贝的是master的内存结构,所以信号屏蔽也拷贝过来了。若不取消,则无法收到退出消息,只能重启服务器或它自己退出才能杀这个进程了。
2. 创建epoll。
3. 将侦听的server_socket_fd添加到epoll。
4. 等待epoll事件的到来:epoll_wait。或者信号也能中断这个epoll_wait:返回-1.
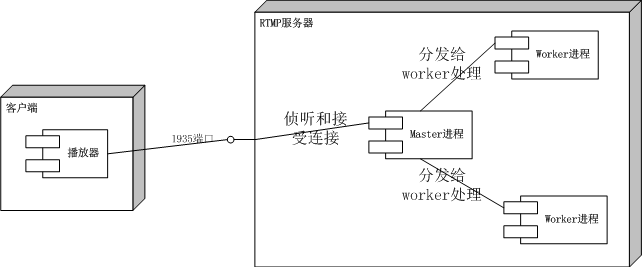
典型的多进程服务器模型如下图所示:
考虑一个RTMP服务器,假设和FMS类似以vhost为边界启动worker,但是client应该连接到指定的worker。所以这个典型的模型就需要修改了。
有一种方式是master接受连接,handshake,然后接收到clieint的connect请求后,知道连接的vhost是哪个,再把这个client fd转发给worker。如下图所示:
但这种方式master过于复杂,它实际上需要做worker要做的事情。多进程稳定的一个原因是进程的自然边界,worker进程崩溃不会影响其他worker和master,如果中心master崩溃,那么系统就完蛋了。所以master要尽量简单不能有过多的逻辑。另外,单进程和多进程切换的一个条件,就是worker能用一个函数表达,单进程时直接调用这个函数,而多进程时fork后调用这个函数;若master要混合worker的功能,单进程时也需要过多交互。
改进如下图:
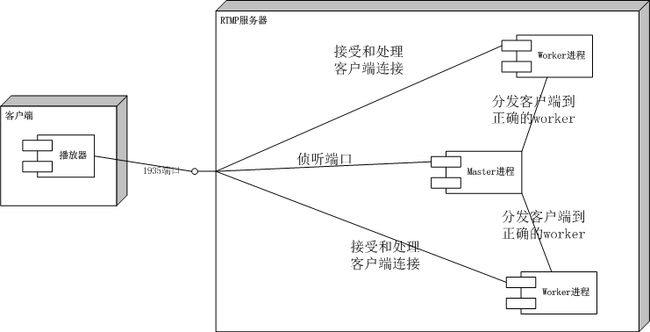
master变得简单,worker功能也单一了。worker发现不是自己的client时,将client发给给master,由master分发给特定的worker。单进程时没有分发这一步了;多进程时master也只需要分发fd,而不需要处理协议的逻辑。
在master和worker之间传递fd不是一个好办法,因为过多频繁的SIGIO可能导致“I/O possible”;google上找了一下说是由于信号SIGIO没有处理引起,但明显已经侦听了handler;有人说是signal queue overflow,恩,这个很像!
socketpaire有时还会引起“[write_channel] sendmsg error, ret=-1, errno=0xb Resource temporarily unavailable”错误。管道错误。一般发生在worker进程中,如果多个woker进程都向master发送数据,而master处理一个数据后sleep或者做其他的事情去了,就会造成这种情况(master的socketpaire缓冲区满了)。
master若需要和worker使用socketpair通信,master使用信号来实现异步,当worker的socketpair有SIGIO信号时,说明worker在发数据,如何判断是哪个worker发的呢?可以用select,当然不太好;可以使用F_SETSIG来更改默认的SIGIO,改为SIGRTMIN+fd,当worker有数据时,收到的信号就包含了fd了。
获取SIGIO的fd的另外一个方法,是使用siginfo_t取得fd。使用F_SETSIG可以设置的SIG较少,SIGRTMAX为64,所以最多可用32个自定义实时信号,一般用来对SIGIO分类。必须将SIGIO定义为实时信号,然后在sigaction时设置SA_SIGINFO和使用void (*handler)(int signo, siginfo_t* info, void* context),info->si_fd就是SIGIO的fd。
以下是一个糅合了多进程、信号、socketpair、passing fd的一个原型,较稳定的一个原型:
- // mpserver2 —— multiple processes server
- #include <stdio.h>
- #include <string.h>
- #include <stdlib.h>
- #include <iostream>
- #include <vector>
- using namespace std;
- #include <unistd.h>
- #include <signal.h>
- #include <sys/types.h>
- #include <sys/socket.h>
- #include <netinet/in.h>
- #include <sys/wait.h>
- #include <sys/epoll.h>
- #include <string.h>
- #include <errno.h>
- #include <fcntl.h>
- #include <sys/ioctl.h>
- #define info(msg) cout << "#" << getpid() << " " << msg
- #define err_exit(msg) info("[error] " << msg << ", errno=0x" << hex << errno << dec << " " << strerror(errno) << endl); exit(-1)
- // define the SIGIO to RTSig, the SIGIO now means rt-sig queue full.
- #define SIG_SOCKET_IO SIGRTMIN+1
- bool global_terminate = false;
- bool global_channel_msg = false;
- // when global_channel_msg is true, the current_active_io_fd set to the fd.
- int current_active_io_fd = -1;
- int current_client_num = 0;
- bool accepting = true;
- // the num of client for a proecess to serve.
- // 2+N
- // 2: the serverfd, the channelfd
- // N: clients.
- #define max_clients_per_process 2+1000
- // the physical max clients, if exceed this value, error!
- #define physical_max_clients 1024
- #define max_workers 100
- struct UserOptions{
- int port;
- int num_processes;
- };
- void discovery_user_options(int argc, char** argv, UserOptions& options){
- if(argc <= 2){
- cout << "Usage: " << argv[0] << " <port> <num_processes>" << endl
- << "port: the port to listen" << endl
- << "num_processes: the num to start processes. if 0, use single process mode" << endl
- << "for example: " << argv[0] << " 1990 20" << endl;
- exit(1);
- }
- options.port = atoi(argv[1]);
- options.num_processes = atoi(argv[2]);
- }
- #define CMD_FD 100
- #define CMD_INFO 200
- struct channel_msg{
- int command;
- int fd; // the fd, set to -1 if no fd.
- int total_client; // the total clients number of specified process.
- int param; // the param.
- };
- void write_channel(int sock, channel_msg* data, int size)
- {
- msghdr msg;
- // init msg_control
- if(data->fd == -1){
- msg.msg_control = NULL;
- msg.msg_controllen = 0;
- }
- else{
- union {
- struct cmsghdr cm;
- char space[CMSG_SPACE(sizeof(int))];
- } cmsg;
- memset(&cmsg, 0, sizeof(cmsg));
- cmsg.cm.cmsg_level = SOL_SOCKET;
- cmsg.cm.cmsg_type = SCM_RIGHTS; // we are sending fd.
- cmsg.cm.cmsg_len = CMSG_LEN(sizeof(int));
- msg.msg_control = (cmsghdr*)&cmsg;
- msg.msg_controllen = sizeof(cmsg);
- *(int *)CMSG_DATA(&cmsg.cm) = data->fd;
- }
- // init msg_iov
- iovec iov[1];
- iov[0].iov_base = data;
- iov[0].iov_len = size;
- msg.msg_iov = iov;
- msg.msg_iovlen = 1;
- // init msg_name
- msg.msg_name = NULL;
- msg.msg_namelen = 0;
- info("[write_channel][info] data fd=" << data->fd << ", command="
- << data->command << ", total_client=" << data->total_client
- << ", param=" << data->param << endl);
- while(true){
- ssize_t ret;
- if ((ret = sendmsg(sock, &msg, 0)) <= 0){
- // errno = 0xb Resource temporarily unavailable
- // donot retry, for it's no use, error infinite loop.
- err_exit("[write_channel] sendmsg error, ret=" << ret);
- }
- break;
- }
- }
- void read_channel(int sock, channel_msg* data, int size)
- {
- msghdr msg;
- // msg_iov
- iovec iov[1];
- iov[0].iov_base = data;
- iov[0].iov_len = size;
- msg.msg_iov = iov;
- msg.msg_iovlen = 1;
- // msg_name
- msg.msg_name = NULL;
- msg.msg_namelen = 0;
- // msg_control
- union { // union to create a 8B aligned memory.
- struct cmsghdr cm; // 16B = 8+4+4
- char space[CMSG_SPACE(sizeof(int))]; // 24B = 16+4+4
- } cmsg;
- memset(&cmsg, 0, sizeof(cmsg));
- msg.msg_control = (cmsghdr*)&cmsg;
- msg.msg_controllen = sizeof(cmsg);
- ssize_t ret;
- if ((ret = recvmsg(sock, &msg, 0)) == -1) {
- err_exit("[read_channel] recvmsg error");
- }
- if(ret == 0){
- info("[read_channel] connection closed" << endl);
- exit(0);
- }
- info("[read_channel][info] data fd=" << data->fd << ", command="
- << data->command << ", total_client=" << data->total_client
- << ", param=" << data->param << endl);
- if(data->command == CMD_FD){
- int fd = *(int *)CMSG_DATA(&cmsg.cm);
- if(fd == 0 || fd == 1){
- err_exit("[read_channel] recvmsg invalid fd=" << fd
- << ", data->fd=" << data->fd << ", command=" << data->command
- << ", ret=" << ret);
- }
- data->fd = fd;
- }
- else{
- data->fd = -1;
- }
- }
- void set_noblocking(int fd){
- int flag = 1;
- if(ioctl(fd, FIONBIO, &flag) == -1){
- err_exit("[master] ioctl failed!");
- }
- info("[master] server socket no-block flag set success" << endl);
- }
- int listen_server_socket(UserOptions& options){
- int serverfd = socket(AF_INET, SOCK_STREAM, 0);
- if(serverfd == -1){
- err_exit("[master] init socket error!");
- }
- info("[master] init socket success! #" << serverfd << endl);
- int reuse_socket = 1;
- if(setsockopt(serverfd, SOL_SOCKET, SO_REUSEADDR, &reuse_socket, sizeof(int)) == -1){
- err_exit("[master] setsockopt reuse-addr error!");
- }
- info("[master] setsockopt reuse-addr success!" << endl);
- set_noblocking(serverfd);
- sockaddr_in addr;
- addr.sin_family = AF_INET;
- addr.sin_port = htons(options.port);
- addr.sin_addr.s_addr = INADDR_ANY;
- if(bind(serverfd, (const sockaddr*)&addr, sizeof(sockaddr_in)) == -1){
- err_exit("[master] bind socket error!");
- }
- info("[master] bind socket success!" << endl);
- if(listen(serverfd, 10) == -1){
- err_exit("[master] listen socket error!");
- }
- info("[master] listen socket success! " << options.port << endl);
- return serverfd;
- }
- // both master and worker will invoke this handler.
- void signal_handler(int signo, siginfo_t* info, void* context){
- info("#" << getpid() << " get a signal:");
- if(signo == SIG_SOCKET_IO){
- cout << "SIG_SOCKET_IO!" << endl;
- global_channel_msg = true;
- current_active_io_fd = info->si_fd;
- info("[master] get SIGIO: fd=" << info->si_fd << endl);
- return;
- }
- switch(signo){
- case SIGCHLD:
- cout << "SIGCHLD";
- break;
- case SIGALRM:
- cout << "SIGALRM";
- break;
- case SIGIO:
- cout << "SIGIO";
- info("[master][warning] ignore the SIGIO: rt-sig queue is full!" << endl);
- break;
- case SIGINT:
- cout << "SIGINT";
- global_terminate = true;
- break;
- case SIGHUP:
- cout << "SIGHUP";
- global_terminate = true;
- break;
- case SIGTERM:
- cout << "SIGTERM";
- global_terminate = true;
- break;
- case SIGQUIT:
- cout << "SIGQUIT";
- global_terminate = true;
- break;
- case SIGUSR1:
- cout << "SIGUSR1";
- break;
- case SIGUSR2:
- cout << "SIGUSR2";
- break;
- }
- cout << "!" << endl;
- }
- void register_signal_handler_imp(int signum, void (*handler)(int, siginfo_t*, void*)){
- struct sigaction action;
- action.sa_flags = SA_SIGINFO;
- action.sa_sigaction = handler;
- sigemptyset(&action.sa_mask);
- //action.sa_flags = 0;
- if(sigaction(signum, &action, NULL) == -1){
- err_exit("[master] register signal handler failed!");
- }
- }
- void register_signal_handler(){
- register_signal_handler_imp(SIGCHLD, signal_handler);
- register_signal_handler_imp(SIGALRM, signal_handler);
- register_signal_handler_imp(SIGIO, signal_handler);
- register_signal_handler_imp(SIG_SOCKET_IO, signal_handler);
- register_signal_handler_imp(SIGINT, signal_handler);
- register_signal_handler_imp(SIGHUP, signal_handler);
- register_signal_handler_imp(SIGTERM, signal_handler);
- register_signal_handler_imp(SIGQUIT, signal_handler);
- register_signal_handler_imp(SIGUSR1, signal_handler);
- register_signal_handler_imp(SIGUSR2, signal_handler);
- info("[master] register signal handler success!" << endl);
- }
- void block_specified_signals(){
- sigset_t set;
- sigemptyset(&set);
- sigaddset(&set, SIGCHLD);
- sigaddset(&set, SIGALRM);
- sigaddset(&set, SIGIO);
- sigaddset(&set, SIG_SOCKET_IO);
- sigaddset(&set, SIGINT);
- sigaddset(&set, SIGHUP);
- sigaddset(&set, SIGTERM);
- sigaddset(&set, SIGQUIT);
- sigaddset(&set, SIGUSR1);
- sigaddset(&set, SIGUSR2);
- if(sigprocmask(SIG_BLOCK, &set, NULL) == -1){
- err_exit("[master] sigprocmask block signal failed!");
- }
- info("[master] sigprocmask block signal success!" << endl);
- }
- void unblock_all_signals(){
- sigset_t set;
- sigemptyset(&set);
- // the master process block all signals, we unblock all for we use epoll to wait events.
- if(sigprocmask(SIG_SETMASK, &set, NULL) == -1){
- err_exit("[worker] sigprocmask unblock signal failed!");
- }
- info("[worker] sigprocmask unblock signal success!" << endl);
- }
- void epoll_add_event(int ep, int fd){
- epoll_event ee;
- ee.events = EPOLLIN;
- ee.data.fd = fd;
- if(epoll_ctl(ep, EPOLL_CTL_ADD, fd, &ee) == -1){
- err_exit("[worker] epoll add event failed!");
- }
- current_client_num ++;
- info("[worker] epoll add fd success: #" << fd << ", current_client_num=" << current_client_num << endl);
- }
- void epoll_remove_event(int ep, int fd){
- if(epoll_ctl(ep, EPOLL_CTL_DEL, fd, NULL) == -1){
- err_exit("[worker] epoll remove event failed! fd=" << fd << ", errno=0x" << hex << errno << dec << " " << strerror(errno));
- }
- current_client_num --;
- info("[worker] epoll remove fd success: #" << fd << ", current_client_num=" << current_client_num << endl);
- }
- void close_client(int ep, int fd, int serverfd, int worker_channel, bool do_report = true){
- info("[worker] the client dead, remove it: #" << fd << endl);
- epoll_remove_event(ep, fd);
- close(fd);
- if(serverfd == fd){
- info("[worker] warning to close the server fd" << endl);
- }
- // start accept again.
- if(!accepting && current_client_num < max_clients_per_process){
- epoll_add_event(ep, serverfd);
- accepting = true;
- }
- // notice the master: worker can take more.
- if(do_report){
- channel_msg msg;
- msg.command = CMD_INFO;
- msg.total_client = current_client_num;
- msg.fd = -1;
- msg.param = 0;
- write_channel(worker_channel, &msg, sizeof(channel_msg));
- }
- }
- void worker_get_event(int ep, int serverfd, epoll_event& active, int worker_channel){
- info("[worker] process #" << getpid() << " current_client_num=" << current_client_num << ", worker_channel=" << worker_channel << endl);
- int fd = active.data.fd;
- // server listening socket event.
- if(fd == serverfd){
- if(current_client_num < physical_max_clients){
- int client = accept(serverfd, NULL, 0);
- if(client == -1){
- // thundering herd
- // http://www.citi.umich.edu/projects/linux-scalability/reports/accept.html
- if(errno == EAGAIN || errno == EWOULDBLOCK){
- info("[worker][warning] get a thundering herd at #" << getpid() << endl);
- return;
- }
- err_exit("[worker] accept client socket error!");
- }
- int reuse_socket = 1;
- if(setsockopt(client, SOL_SOCKET, SO_REUSEADDR, &reuse_socket, sizeof(int)) == -1){
- err_exit("[worker] setsockopt reuse-addr error!");
- }
- info("[worker] setsockopt reuse-addr success!" << endl);
- info("[worker] process #" << getpid() << " get a client: #" << client << endl);
- epoll_add_event(ep, client);
- }
- else{
- epoll_remove_event(ep, fd); // donot accept.
- accepting = false;
- info("[worker] warning, the worker #" << getpid()
- << " exceed the max clients, current_client_num=" << current_client_num << endl);
- }
- return;
- }
- // channel event.
- if(fd == worker_channel){
- channel_msg msg;
- read_channel(worker_channel, &msg, sizeof(channel_msg));
- info("[worker] get a channel message. fd=" << msg.fd << ", command=" << msg.command
- << ", current_client_num=" << current_client_num << ", max_clients_per_process=" << max_clients_per_process
- << ", physical_max_clients=" << physical_max_clients << endl);
- if(msg.command == CMD_FD && msg.fd != -1){
- if(msg.fd == 0 || msg.fd == 1){
- info("[worker][warning] ignore the invalid passing fd=" << msg.fd << endl);
- return;
- }
- // accept all client from master, util the read overloaded.
- if(current_client_num < physical_max_clients){
- epoll_add_event(ep, msg.fd);
- info("[worker] get a dispatched client. #" << msg.fd << endl);
- }
- else{
- info("[worker][warning] worker overloaded, close the fd: " << msg.fd << endl);
- close(msg.fd);
- }
- }
- else{
- err_exit("[worker] get a invalid channel");
- }
- return;
- }
- // client event.
- if((active.events & EPOLLHUP) == EPOLLHUP || (active.events & EPOLLERR) == EPOLLERR){
- info("[worker] get a EPOLLHUP or EPOLLERR event from client #" << fd << endl);
- close_client(ep, fd, serverfd, worker_channel);
- return;
- }
- if((active.events & EPOLLIN) == EPOLLIN){
- if(true){
- info("[worker] get a EPOLLIN event from client #" << fd << endl);
- char ch_control; // we MUST not read more bytes, for the fd maybe passing to other process!
- if(recv(fd, &ch_control, sizeof(char), 0) <= 0){
- close_client(ep, fd, serverfd, worker_channel);
- return;
- }
- // check the first byte, if 'M' it's message, if 'C' it's control message.
- if(ch_control == 'C'){
- int client_required_id; //worker_channel
- if(recv(fd, &client_required_id, sizeof(int), 0) <= 0){
- close_client(ep, fd, serverfd, worker_channel);
- return;
- }
- pid_t pid = getpid();
- info("[worker] get client control message: client_required_id=" << client_required_id << endl);
- if((client_required_id % pid) == 0){
- info("[worker][verified] client exactly required this server" << endl);
- }
- else{
- // never send the follows:
- if(fd == 0 || fd == 1 || fd == serverfd || fd == worker_channel){
- info("[worker][warning] ignore invalid fd to passing: " << fd << endl);
- close_client(ep, fd, serverfd, worker_channel);
- return;
- }
- info("[worker] send to master to dispatch it" << endl);
- channel_msg msg;
- msg.fd = fd;
- msg.command = CMD_FD;
- msg.total_client = current_client_num;
- msg.param = client_required_id;
- write_channel(worker_channel, &msg, sizeof(channel_msg));
- // donot report to master, for the CMD_FD message has reported.
- close_client(ep, fd, serverfd, worker_channel, false);
- return;
- }
- }
- else{
- char buf[1024];
- if(recv(fd, buf, sizeof(buf), 0) <= 0){
- close_client(ep, fd, serverfd, worker_channel);
- return;
- }
- info("[worker] get client data message: " << buf << endl);
- }
- }
- if(true){
- char msg[] = "hello, server ping!";
- if(send(fd, msg, sizeof(msg), 0) <= 0){
- close_client(ep, fd, serverfd, worker_channel);
- return;
- }
- }
- return;
- }
- }
- void worker_process_cycle(int serverfd, int worker_channel){
- cout << "[worker] start worker process cycle. serverfd=" << serverfd
- << ", worker_channel=" << worker_channel
- << ((worker_channel == -1)? "(single process)" : "(multiple processes)")<< endl;
- unblock_all_signals();
- int ep = epoll_create(1024);
- if(ep == -1){
- err_exit("[worker] epoll_create failed!");
- }
- info("[worker] epoll create success!" << endl);
- epoll_add_event(ep, serverfd);
- epoll_add_event(ep, worker_channel);
- // worker use epoll event, the signal handler will break the epoll_wait to return -1.
- for(;;){
- epoll_event events[1024];
- int incoming = epoll_wait(ep, events, 1024, -1);
- // get a event or error.
- if(incoming == -1){
- if(global_terminate){
- close(worker_channel);
- close(serverfd);
- info("[worker] worker process exit" << endl);
- exit(0);
- }
- break;
- }
- for(int i = 0; i < incoming; i++){
- worker_get_event(ep, serverfd, events[i], worker_channel);
- }
- }
- info("[worker] worker process exited" << endl);
- close(ep);
- }
- struct WorkerProcess{
- pid_t pid;
- int channel;
- int num_clients;
- };
- void start_worker_process(int serverfd, WorkerProcess& worker_process){
- // master/worker use domain socket to communicate.
- int fds[2];
- if(socketpair(AF_UNIX, SOCK_STREAM, 0, fds) == -1){
- err_exit("[master] sockpair create domain socket failed");
- }
- info("[master] sockpair create domain socket success! [" << fds[0] << ", " << fds[1] << "]" << endl);
- // master process, use the fds[0].
- worker_process.num_clients = 0;
- worker_process.channel = fds[0];
- /**
- * SIGIO (http://www.lindevdoc.org/wiki/SIGIO)
- * The SIGIO signal is sent to a process to notify it about some event on a file descriptor, namely:
- * the file descriptor is ready to receive data (previous write has finished).
- * the file descriptor has new data to read
- * an error has occurred
- * This signal is not sent by default; it must be enabled by specifying the O_ASYNC flag to the descriptor
- *
- * O_ASYNC (http://www.lindevdoc.org/wiki/O_ASYNC)
- * The O_ASYNC flag specifies that the process that owns a data stream (by default the process that opened it,
- * but can be changed with fcntl() with the F_SETOWN command) will receive a signal (SIGIO by default, but can
- * be changed with fcntl() with the F_SETSIG command) when the file is ready for reading or writing.
- */
- // set the socket owner to master, to get a SIGIO signal.
- if(fcntl(worker_process.channel, F_SETOWN, getpid()) == -1){
- err_exit("[master] fcntl F_SETOWN to master failed");
- }
- info("[master] fcntl F_SETOWN to master success" << endl);
- // set socket to async to singal SIGIO when data coming.
- int on = 1;
- if(ioctl(worker_process.channel, FIOASYNC, &on) == -1){
- err_exit("[master] ioctl set FIOASYNC failed");
- }
- info("[master] ioctl set FIOASYNC success" << endl);
- /** F_SETSIG
- * if donot use set_sig, we must use select to find which fd is read.
- * http://ajaxxx.livejournal.com/62378.html
- * Linux has the additional feature of fcntl(F_SETSIG), which lets you get the file descriptor that generated the
- * signal back as part of the signal information. So I implemented this, with the obvious semantics: receiving a
- * SIGIO would call the handler for just that file descriptor and then return.
- * remark: the SIGRTMIN=34, SIGRTMAX=62, so only 28 fd cannbe discoveried. so it's used for category signal,
- * and we use SA_SIGINFO for sigaction to get the fd of SIGIO.
- */
- if(fcntl(worker_process.channel, F_SETSIG, SIG_SOCKET_IO) == -1){
- err_exit("[master] fcntl set rtsig failed: F_SETSIG.");
- }
- info("[master] fcntl set rtsig success" << endl);
- // set to unblocking.
- set_noblocking(worker_process.channel);
- set_noblocking(fds[1]);
- // start process by fork.
- pid_t pid = fork();
- if(pid == -1){
- err_exit("[master] fork process failed");
- }
- // worker process, use the fds[1].
- if(pid == 0){
- close(fds[0]);
- worker_process_cycle(serverfd, fds[1]);
- exit(0);
- }
- // master process.
- worker_process.pid = pid;
- close(fds[1]);
- info("[master] fork process success: #" << pid << ", channel=" << worker_process.channel << endl);
- }
- int find_the_required_worker(int serverfd, vector<WorkerProcess>& workers, int client_required_id, int pre_pid){
- // find the exactly worker.
- WorkerProcess* target = NULL;
- int channel = -1;
- for(vector<WorkerProcess>::iterator ite = workers.begin(); ite != workers.end(); ++ite){
- WorkerProcess& worker = *ite;
- if((client_required_id % worker.pid) == 0){
- target = &worker;
- break;
- }
- }
- // find the most idling worker.
- int pre_num = 0;
- for(vector<WorkerProcess>::iterator ite = workers.begin(); ite != workers.end(); ++ite){
- WorkerProcess& worker = *ite;
- if(worker.num_clients < max_clients_per_process && worker.pid != pre_pid){
- if(pre_num == 0 || worker.num_clients < pre_num){
- target = &worker;
- pre_num = worker.num_clients;
- }
- }
- }
- if(target == NULL){
- if(workers.size() < max_workers){
- // start a new worker
- WorkerProcess worker;
- start_worker_process(serverfd, worker);
- workers.push_back(worker);
- return find_the_required_worker(serverfd, workers, client_required_id, pre_pid);
- }
- else{
- err_exit("[master] all " << workers.size() << " workers overloaded!");
- }
- }
- info("[master] find a target to passing fd, pid=" << target->pid << ", num_clients=" << target->num_clients << endl);
- target->num_clients ++;
- return target->channel;
- }
- void on_channel_message(int serverfd, WorkerProcess& host, vector<WorkerProcess>& workers){
- int sock = host.channel;
- channel_msg msg;
- read_channel(sock, &msg, sizeof(channel_msg));
- host.num_clients = msg.total_client;
- cout << "[master] get a channel msg, pid=#" << host.pid << ", fd=" << msg.fd
- << ", total_client=" << msg.total_client
- << ", param=" << msg.param << ", command=" << msg.command << endl;
- if(msg.command == CMD_FD){
- // dispatch and re-dispatch fd
- int channel = find_the_required_worker(serverfd, workers, msg.param, host.pid);
- msg.command = CMD_FD;
- if(msg.fd == 0 || msg.fd == 1){
- info("[master][warning] ignore invalid fd to passing: " << msg.fd << endl);
- return;
- }
- write_channel(channel, &msg, sizeof(channel_msg));
- // direct close the fd, the target worker MUST take it or close it.
- close(msg.fd);
- host.num_clients--;
- }
- else if(msg.command == CMD_INFO){
- return;
- }
- else{
- err_exit("[master] invalid response!");
- }
- }
- int main(int argc, char** argv){
- info("[master] SIGRTMIN=0x" << hex << SIGRTMIN
- << ", SIGRTMAX=0x" << hex << SIGRTMAX << dec
- << ", SIGIO=0x" << hex << SIGIO << dec
- << ", SIGPOLL=0x" << hex << SIGPOLL << dec
- << endl);
- register_signal_handler();
- block_specified_signals();
- //sleep(3);
- UserOptions options;
- discovery_user_options(argc, argv, options);
- int serverfd = listen_server_socket(options);
- // single process mode
- if(options.num_processes == 0){
- worker_process_cycle(serverfd, -1);
- }
- // multiple processes mode
- else{
- vector<WorkerProcess> workers;
- for(int i = 0; i < options.num_processes; i++){
- WorkerProcess worker;
- start_worker_process(serverfd, worker);
- workers.push_back(worker);
- }
- // the empty set for sigsuspend
- sigset_t set;
- sigemptyset(&set);
- // master process use signal only.
- for(;;){
- sigsuspend(&set);
- if(global_terminate){
- // kill all workers.
- for(vector<WorkerProcess>::iterator ite = workers.begin(); ite != workers.end(); ++ite){
- WorkerProcess& worker = *ite;
- kill(worker.pid, SIGTERM);
- }
- // wait for workers to exit.
- for(vector<WorkerProcess>::iterator ite = workers.begin(); ite != workers.end(); ++ite){
- WorkerProcess& worker = *ite;
- int status;
- waitpid(worker.pid, &status, 0);
- }
- info("[master] all worker terminated, master exit" << endl);
- exit(0);
- }
- if(global_channel_msg){
- int active_fd = current_active_io_fd;
- current_active_io_fd = -1;
- global_channel_msg = false;
- // read each channel.
- for(vector<WorkerProcess>::iterator ite = workers.begin(); ite != workers.end(); ++ite){
- WorkerProcess& worker = *ite;
- if(worker.channel == active_fd){
- on_channel_message(serverfd, worker, workers);
- break;
- }
- }
- }
- }
- }
- return 0;
- }
- // mpclient2 —— multiple processes client
- #include <stdio.h>
- #include <stdlib.h>
- #include <iostream>
- using namespace std;
- #include <unistd.h>
- #include <signal.h>
- #include <sys/types.h>
- #include <sys/socket.h>
- #include <netinet/in.h>
- #include <arpa/inet.h>
- #include <string.h>
- #define err_exit(msg) cout << "[error] " << msg << endl; exit(1)
- struct UserOptions{
- char* server_ip;
- int port;
- int num_clients;
- int sleep_ms;
- };
- void discovery_user_options(int argc, char** argv, UserOptions& options){
- if(argc <= 4){
- cout << "Usage: " << argv[0] << " <server_ip> <port> <num_clients> <sleep_ms>" << endl
- << "server_ip: the ip address of server" << endl
- << "port: the port to connect at" << endl
- << "num_clients: the num to start client." << endl
- << "sleep_ms: the time to sleep in ms." << endl
- << "for example: " << argv[0] << " 127.0.0.1 1990 1000 500" << endl;
- exit(1);
- }
- options.server_ip = argv[1];
- options.port = atoi(argv[2]);
- options.num_clients = atoi(argv[3]);
- options.sleep_ms = atoi(argv[4]);
- if(options.num_clients <= 0){
- err_exit("num_clients must > 0.");
- }
- }
- int connect_server_socket(UserOptions& options){
- int clientfd = socket(AF_INET, SOCK_STREAM, 0);
- if(clientfd == -1){
- err_exit("init socket error!");
- }
- cout << "init socket success!" << endl;
- sockaddr_in addr;
- addr.sin_family = AF_INET;
- addr.sin_port = htons(options.port);
- addr.sin_addr.s_addr = inet_addr(options.server_ip);
- if(connect(clientfd, (const sockaddr*)&addr, sizeof(sockaddr_in)) == -1){
- err_exit("connect socket error!");
- }
- cout << "connect socket success!" << endl;
- return clientfd;
- }
- int main(int argc, char** argv){
- srand(0);
- UserOptions options;
- discovery_user_options(argc, argv, options);
- int* fds = new int[options.num_clients];
- for(int i = 0; i < options.num_clients; i++){
- fds[i] = connect_server_socket(options);
- usleep(10 * 1000); // to prevent the SIGIO error: maybe signal queue overflow!
- }
- for(int i = 0; i < options.num_clients; i++){
- int fd = fds[i];
- if(true){
- char c = 'C'; // control message
- if(send(fd, &c, sizeof(char), 0) <= 0){
- close(fd);
- err_exit("send message failed!");
- }
- int required_id = rand();
- if(send(fd, &required_id, sizeof(int), 0) <= 0){
- close(fd);
- err_exit("send message failed!");
- }
- }
- }
- bool do_loop = true;
- while(do_loop){
- int ret = 0;
- for(int i = 0; i < options.num_clients; i++){
- int fd = fds[i];
- if(true){
- char c = 'M'; // data message
- ret = send(fd, &c, sizeof(char), 0);
- if(ret <= 0){
- cout << "send control message to server error" << endl;
- close(fd);
- do_loop = false;
- break;
- }
- char msg[] = "client, ping message!";
- ret = send(fd, msg, sizeof(msg), 0);
- if(ret <= 0){
- cout << "send control value to server error" << endl;
- close(fd);
- do_loop = false;
- break;
- }
- memset(&msg, 0, sizeof(msg));
- }
- if(true){
- char buf[1024];
- memset(buf, 0, sizeof(buf));
- ret = recv(fd, buf, sizeof(buf), 0);
- if(ret <= 0){
- cout << "recv from server error" << endl;
- close(fd);
- do_loop = false;
- break;
- }
- cout << "recv from server: " << buf << endl;
- }
- usleep(options.sleep_ms * 1000);
- }
- }
- delete[] fds;
- return 0;
- }