说说单应性矩阵(homography)在拼接全景图中的应用
请移步至
https://jah10527.github.io/articles/homography.html
说说单应性矩阵(homography)在拼接全景图中的应用
单应性矩阵为一3x3矩阵,描述了射影几何中平面到平面的映射关系,其自由度为8,由九个元素组成,通常令最后一个元素为1或者使其F范数为1,该矩阵可将无穷远点投射于有限处,即空间中平行线在图像上相交于有限处。
(1) s [ x ’ y ’ 1 ] = H [ x y 1 ] = [ h 11 h 12 h 13 h 21 h 22 h 23 h 31 h 32 h 33 ] [ x y 1 ] s \begin{bmatrix} x’ \\ y’ \\ 1 \end{bmatrix} = H \begin{bmatrix} x \\ y \\ 1 \end{bmatrix} = \begin{bmatrix} h_{11} & h_{12} & h_{13} \\ h_{21} & h_{22} & h_{23} \\ h_{31} & h_{32} & h_{33} \end{bmatrix} \begin{bmatrix} x \\ y \\ 1 \end{bmatrix} \tag{1} s⎣⎡x’y’1⎦⎤=H⎣⎡xy1⎦⎤=⎣⎡h11h21h31h12h22h32h13h23h33⎦⎤⎣⎡xy1⎦⎤(1)
若最后一行为 ( 0 0 1 ) \left( \begin{matrix} 0 & 0 & 1 \end{matrix} \right) (001),则不能将无穷远点投射于有限处,称为仿射变换(Affine),自由度为6,如下:
(2) A = [ ∗ ∗ ∗ ∗ ∗ ∗ 0 0 1 ] A= \begin{bmatrix} * & * & * \\ * & * & * \\0 & 0 & 1 \end{bmatrix} \tag{2} A=⎣⎡∗∗0∗∗0∗∗1⎦⎤(2)
此外还有4自由度的相似变换和3自由度的等距变换.。
- 全景图拼接
理论上要求用于拼接的图片拍摄时其相机光心需要重合。
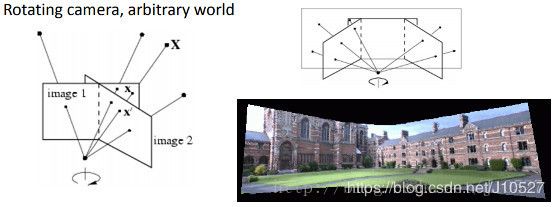
通常用于拼接全景图的照片都是拍摄的大场景,可以近似认为其拍摄相机光心重合,若各照片拍摄时光心偏离越大拼接效果就会越差。
获取匹配点对过程略。
- 由匹配点对估计变换矩阵
图像对之间的运动假设只存在三维旋转,则变换为:
(3) s i [ u i ′ v i ′ 1 ] = H [ u i v i 1 ] = K ′ R K − 1 [ u i v i 1 ] s_{i}\begin{bmatrix} u'_{i} \\ v'_{i} \\ 1 \end{bmatrix}=H\begin{bmatrix} u_{i} \\ v_{i} \\ 1 \end{bmatrix}=K'RK^{-1} \begin{bmatrix} u_{i} \\ v_{i} \\ 1 \end{bmatrix} \tag{3} si⎣⎡ui′vi′1⎦⎤=H⎣⎡uivi1⎦⎤=K′RK−1⎣⎡uivi1⎦⎤(3)
其中 K K K和 K ′ K' K′为相机内参数矩阵, R R R为旋转矩阵, H H H为变换矩阵。若已知内参数矩阵,使用umeyama绝对定向方法只需要两个匹配点对即可估计出变换矩阵 H H H。下面的代码展示了由两组匹配点对在相机坐标系下的齐次坐标,计算三维旋转的过程。
/*
* in: q1, q2 n-by-2 matrix, correspondance represented in the camera coordinate system, not in the image coordinate system
* out: R 3-by-3 rotation matrix
* author: Antonio Fan
* date: Jan. 17th. 2018.
* email: [email protected]
* referance: "Least-squares estimation of transformation parameters between two point patterns", Shinji Umeyama, PAMI 1991, DOI: 10.1109/34.88573
*/
void umeyama(cv::Mat &q1, cv::Mat &q2, cv::Mat &R)
{
auto p1 = q1.ptr<cv::Point2f>();
auto p2 = q2.ptr<cv::Point2f>();
cv::Matx33d A = cv::Matx33d::zeros();
A(2, 2) = q1.rows;
for (int i = 0; i < q1.rows; ++i)
{
A(0, 0) += p1[i].x*p2[i].x;
A(0, 1) += p1[i].y*p2[i].x;
A(0, 2) += p2[i].x;
A(1, 0) += p1[i].x*p2[i].y;
A(1, 1) += p1[i].y*p2[i].y;
A(1, 2) += p2[i].y;
A(2, 0) += p1[i].x;
A(2, 1) += p1[i].y;
}
cv::Mat w, u, vt;
cv::SVD::compute(A, w, u, vt);
w.at<double>(0) = 1;
w.at<double>(1) = 1;
w.at<double>(2) = cv::determinant(u)*cv::determinant(vt);
R = u*cv::Mat::diag(w)*vt;
}
int main()
{
cv::RNG rnger(cv::getTickCount());
int num = 2;
cv::Mat pts3D(num, 3, CV_32FC1);
rnger.fill(pts3D, cv::RNG::UNIFORM, cv::Scalar::all(-1.f), cv::Scalar::all(1.f));
pts3D.col(2) += 2;
cv::Mat R;
cv::Matx31f rvec;
rvec(0) = .1;
rvec(1) = .01;
rvec(2) = .01;
cv::Rodrigues(rvec, R);
std::cout << "R: " << R << std::endl;
cv::Mat pts1, pts2;
cv::convertPointsFromHomogeneous(pts3D, pts1);
//std::cout << pts1 << std::endl;
pts3D = R*pts3D.t();
pts3D = pts3D.t();
cv::convertPointsFromHomogeneous(pts3D, pts2);
//std::cout << pts2 << std::endl;
cv::Mat Restimated;
umeyama(pts1, pts2, Restimated);
std::cout << "Restimated: " << Restimated << std::endl;
return 0;
}
该方法即是根据相机纯旋转情况下拍摄的图片来估计旋转的方法。如果既有旋转又有平移量,则应该使用本质矩阵(Essential matrix)来估计运动,但是如果空间中的点分布在一个平面上的话,需使用单应性矩阵来求取旋转和平移。
opencv中全景图的处理方法
opencv中的stitching module的H估计过程是,使用findHomography获取变换矩阵 H H H作为初值进行光束平差。其中findHomography使用RANSAC与四个匹配点对最小二乘搭配求解 H H H,获取初值后再进行全局重投影优化获取最终的变换矩阵系列。