《第5讲 相机与图像 》读书笔记
本文是《视觉SLAM十四讲》第5讲的个人读书笔记,为防止后期记忆遗忘写的。
本讲讨论的是“机器人如何观测外部世界”, 也就是观测方程部分。而在以相机为主的视觉 SLAM 中,观测主要是指相机成像的过程。
本节目标
- 总结针孔相机的模型、内参与径向畸变参数。
- 总结世界坐标-->相机坐标-->物理成像面坐标-->归一化成像坐标---->畸变纠正坐标 的变换。
- 学习并总结点云拼接程序。
5.1 相机模型
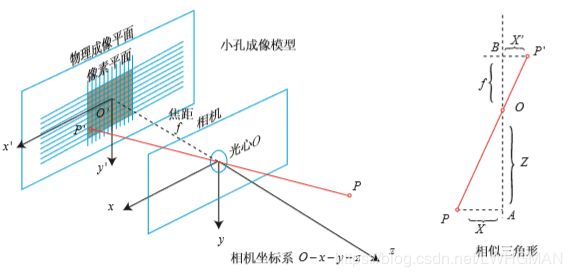
针孔模型描述相机将三维世界中的坐标点(单位为米)映射到二维图像平面(单位为像素)的过程 。由于 相机镜头上的透镜的存在,会使得光线投影到成像平面的过程中会产生畸变。因此,我们 使用针孔和畸变两个模型来描述整个投影过程。 这两个模型能够 把外部的三维点投影到相机内部成像平面,构成了相机的内参数。
在物理成像方面(讨论的是物理面):设 2观测坐标P(以自己的位姿为标准) 的坐标为 [X,Y,Z]T,P′ 为 [X′,Y ′,Z′]T。
 <=======>
<=======>
上式只是描述了点 P 和它的像之间的空间关系。不过,在相机中,我们最终获得的是 一个个的像素,这期间还将进行一些变化。
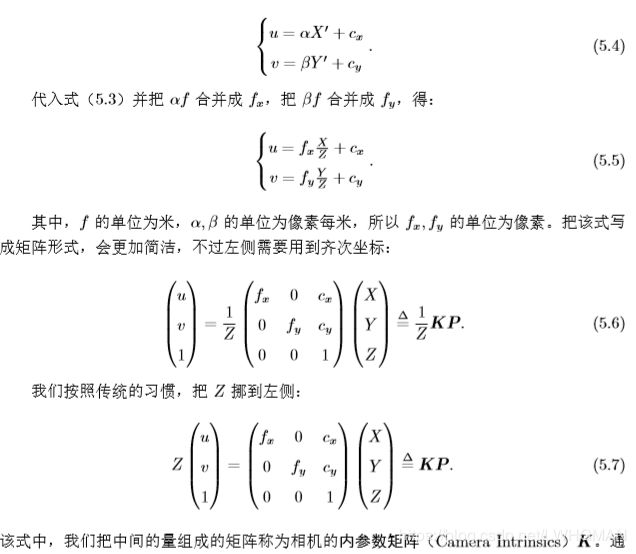
为了描述传感器将感受到的光 线转换成图像像素的过程,我们设在物理成像平面上固定着一个像素平面 o−u−v。我们在像素平面得到了 P′ 的 4像素坐标:[u,v]T。4像素坐标系与3成像平面坐标之间,相差了一个缩放和一个原点的平移。我 们设像素坐标在 u 轴上缩放了 α 倍,在 v 上缩放了 β 倍。同时,原点平移了 [cx,cy]T。那 么,3成像平面坐标P′ 的坐标与4像素坐标系坐标 [u,v]T 的关系为:
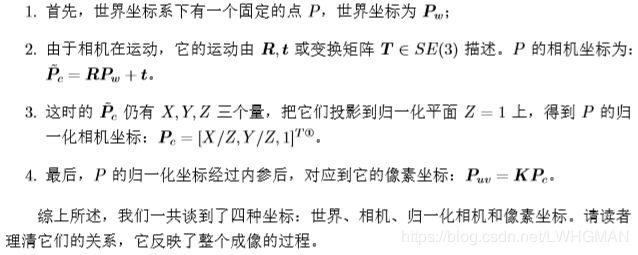
由于相机在运动,所以 2观测坐标P的相机坐标应该是它的1世界坐标(记为 Pw), 根据相机的当前位姿,变换到相机坐标系下的结果。相机的位姿由它的旋转矩阵 R 和平移向量 t 来描述。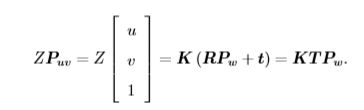 。相机的位姿 R,t 又称为相机的外参数 (CameraExtrinsics)。相比于不变的内参,外参会随着相机运动发生改变,同时也是 SLAM 中待估计的目标,代表着机器人的轨迹。 像素坐标 [u,v]T,看成对归一化平面上的点进行量化测量的结果。 从而给出了世界坐标到像素坐标的变化数学关系。
。相机的位姿 R,t 又称为相机的外参数 (CameraExtrinsics)。相比于不变的内参,外参会随着相机运动发生改变,同时也是 SLAM 中待估计的目标,代表着机器人的轨迹。 像素坐标 [u,v]T,看成对归一化平面上的点进行量化测量的结果。 从而给出了世界坐标到像素坐标的变化数学关系。
上式两侧都是齐次坐标。因为齐次坐标乘上非零常数后表达同样的含义,所以可以简 单地把 Z 去掉: 
但是,因为透镜等原因,相机成像会发生畸变。。径向畸变可看成 坐标点沿着长度方向发生了变化 δr, 也就是其距离原点的长度发生了变化。切向畸变可以 看成坐标点沿着切线方向发生了变化,也就是水平夹角发生了变化 δθ。
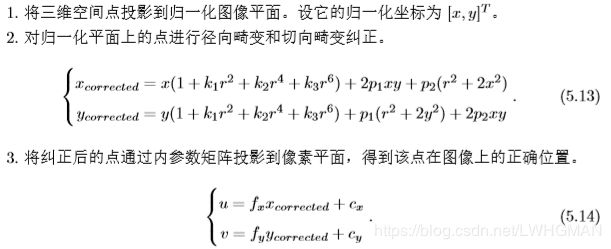
对于径向畸变的纠正,其中 [x,y]T 是未纠正的点的坐标,[xcorrected,ycorrected]T 是纠正后的点的坐标,注意它们 都是归一化平面上的点,而不是像素平面上的点。 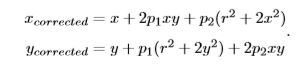
对于切向畸变,可以使用另外的两个参数 p1,p2 来进行纠正: 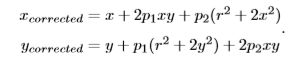
所以,对于相机坐标系中的一点 P(X,Y,Z),我们能够通过五个畸变系数找到这个点在像素平面上的正确位置。
归一平面是对物理成像平面进行除以Z进行归一化的3成像平面坐标。
最后,我们小结一下单目相机的成像过程:
第3步和第4步间还得插入一个相机畸变纠正的变化过程。
双目相机模型
仅根据一个像素,我们是无法确定 这个空间点的具体位置的。这是因为,从相机光心到归一化平面连线上的所有点,都可以 投影至该像素上。只有当 P 的深度确定时(比如通过双目或 RGB-D 相机),我们才能确 切地知道它的空间位置。
在左右双目的相机中,我们可以把两个相机都看 作针孔相机。它们是水平放置的,意味两个相机的光圈中心都位于 x 轴上。它们的距离称 为双目相机的基线(Baseline, 记作 b),是双目的重要参数。
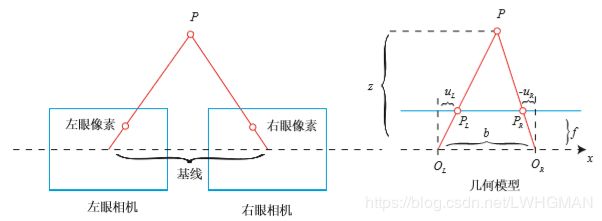
。根据三角形 P−PL−PR 和 P−OL−OR 的相似关系,有: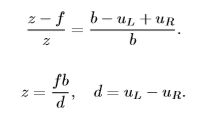 。
。
RGB-D 相机模型
RGB-D 相机的做法更为“主动”一些,它 能够主动测量每个像素的深度。目前的 RGB-D 相机按原理可分为两大类:通过红外结构光、通过飞行时间法。无论是结构光还是 ToF,RGB-D 相机都需要向探测目标发射一束光线(通常是红外 光)。
在测量深度之后,RGB-D 相机通常按照生产时的各个相机摆放位置,自己完成深度 与彩色图像素之间的配对,输出一一对应的彩色图和深度图。我们可以在同一个图像位置, 读取到色彩信息和距离信息,计算像素的 3D 相机坐标,生成点云(Point Cloud)。
但是,由于这种发射-接受的测量方 式,使得它使用范围比较受限。用红外进行深度值测量的 RGB-D 相机,容易受到日光或 其他传感器发射的红外光干扰,因此不能在室外使用,同时使用多个时也会相互干扰。对 于透射材质的物体,因为接受不到反射光,所以无法测量这些点的位置。此外,RGB-D 相 机在成本、功耗方面,都有一些劣势。
5.2 图像
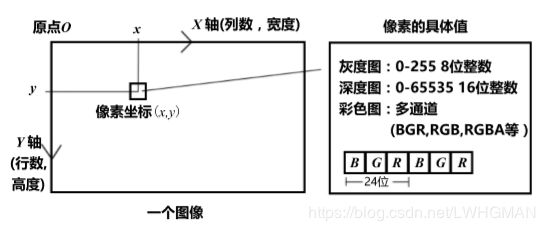
我们平时说的图 像的宽度和列数,对应着 X 轴;而图像的行数或高度,则对应着它的 Y 轴。 unsigned char pixel = image[y][x];
5.4 实践:拼接点云
本节程序提供了五张 RGB-D 图像,并且知道了每个图像的内参和外参。根据 RGB-D 图像和相机内参,我们可以计算任何一个像素在相机坐标系下的位置。同时,根据相机位姿,又能计算这些像素在世界坐标系下的 位置。如果把所有像素的空间坐标都求出来,相当于构建一张类似于地图的东西。
在 color/下有 1.png 到 5.png 五张 RGB 图,而在 depth/下有五张对应的深度图。同时,pose.txt 文件给出了五张图像 的相机位姿(以 Twc 形式)。位姿记录的形式是平移向量加旋转四元数:[x,y,z,qx,qy,qz,qw]。
#include
#include
#include // for formating strings
#include
#include
#include
#include
#include
#include
using namespace std;
int main( int argc, char** argv )
{
vector colorImgs, depthImgs; // 彩色图和深度图.
vector poses; // 相机位姿,Isometry3d实质上是4*4的矩阵.
ifstream fin("./pose.txt");
if (!fin)
{
cerr<<"请在有pose.txt的目录下运行此程序"<>d;
Eigen::Quaterniond q( data[6], data[3], data[4], data[5] ); //Quaterniond,四元数,(qw,qx,qy,qz)
Eigen::Isometry3d T(q);
T.pretranslate( Eigen::Vector3d( data[0], data[1], data[2] )); //生成变换矩阵
poses.push_back( T );
}
// 计算点云并拼接
// 相机内参 U=fx*Xcorrected+cx V=fy*Ycorrected+cy
double cx = 325.5;
double cy = 253.5;
double fx = 518.0;
double fy = 519.0;
double depthScale = 1000.0;
cout<<"正在将图像转换为点云..."< PointCloud;
// 新建一个点云
PointCloud::Ptr pointCloud( new PointCloud );
for ( int i=0; i<5; i++ )
{
cout<<"转换图像中: "< ( v )[u]; // 深度值
if ( d==0 ) continue; // 为0表示没有测量到
Eigen::Vector3d point;
//U=fx*Xcorrected+cx V=fy*Ycorrected+cy fx= α*f fy= β*f
//求相机坐标系坐标point,并转换成世界坐标系坐标pointWorld
point[2] = double(d)/depthScale;
point[0] = (u-cx)*point[2]/fx;
point[1] = (v-cy)*point[2]/fy;
Eigen::Vector3d pointWorld = T*point;
//绘制点云
PointT p ;
p.x = pointWorld[0];
p.y = pointWorld[1];
p.z = pointWorld[2];
p.b = color.data[ v*color.step+u*color.channels() ];
p.g = color.data[ v*color.step+u*color.channels()+1 ];
p.r = color.data[ v*color.step+u*color.channels()+2 ];
pointCloud->points.push_back( p );
}
}
pointCloud->is_dense = false;
cout<<"点云共有"<size()<<"个点."<