这里推荐两种方法,第一种是用鼠标滑动,第二种是用手机的陀螺仪进行全景查看
第一种:
1、新建一Sphere,然后为其赋予材质,注意材质的Shader类型为:Mobile/particles/Alpha Blended,然后将做好的全景图贴上去
2、在摄像机上附加以下脚本:代码来源参考自
1 using UnityEngine;
2 using System.Collections;
3 using UnityEngine.UI;
4
5 public class GyroController_01 : MonoBehaviour
6 {
7 public float moveSpeed = 1;//物体旋转速度
8 public GameObject target;
9
10 private Vector2 oldPosition;
11 private Vector2 oldPosition1;
12 private Vector2 oldPosition2;
13
14
15 private float distance = 0;
16 private bool flag = false;
17 //摄像头的位置
18 private float x = 0f;
19 private float y = 0f;
20 //左右滑动移动速度
21 public float xSpeed = 250f;
22 public float ySpeed = 120f;
23 //缩放限制系数
24 public float yMinLimit = -360;
25 public float yMaxLimit = 360;
26 //是否旋转
27 private bool isRotate = true;
28 //计数器
29 private float count = 0;
30
31 //初始化游戏信息设置
32 void Start()
33 {
34 Vector3 angles = transform.eulerAngles;
35 x = angles.y;
36 y = angles.x;
37 if (GetComponent())
38 GetComponent().freezeRotation = true;
39 }
40
41
42
43 // Update is called once per frame
44 void Update()
45 {
46
47 if (isRotate)
48 {
49
50 target.transform.Rotate(Vector3.down, Time.deltaTime * moveSpeed, Space.World);
51
52 }
53 if (!isRotate)
54 {
55 count += Time.deltaTime;
56 if (count > 5)
57 {
58 count = 0;
59 isRotate = true;
60 }
61 }
62
63 //触摸类型为移动触摸
64 if (Input.GetMouseButton(0))
65 {
66 //根据触摸点计算X与Y位置
67 x += Input.GetAxis("Mouse X") * xSpeed * Time.deltaTime;
68 y -= Input.GetAxis("Mouse Y") * ySpeed * Time.deltaTime;
69 isRotate = false;
70 }
71 //判断鼠标滑轮是否输入
72 float temp = Input.GetAxis("Mouse ScrollWheel");
73 if (temp != 0)
74 {
75 if (temp > 0)
76 {
77 // 这里的数据是根据我项目中的模型而调节的,大家可以自己任意修改
78 if (distance > -15)
79 {
80 distance -= 0.5f;
81 }
82 }
83 if (temp < 0)
84 {
85 // 这里的数据是根据我项目中的模型而调节的,大家可以自己任意修改
86 if (distance < 20)
87 {
88 distance += 0.5f;
89 }
90 }
91 }
92
93 }
94
95 //计算距离,判断放大还是缩小。放大返回true,缩小返回false
96 bool IsEnlarge(Vector2 oP1, Vector2 oP2, Vector2 nP1, Vector2 nP2)
97 {
98 //old distance
99 float oldDistance = Mathf.Sqrt((oP1.x - oP2.x) * (oP1.x - oP2.x) + (oP1.y - oP2.y) * (oP1.y - oP2.y));
100 //new distance
101 float newDistance = Mathf.Sqrt((nP1.x - nP2.x) * (nP1.x - nP2.x) + (nP1.y - nP2.y) * (nP1.y - nP2.y));
102
103 if (oldDistance < newDistance)
104 {
105 //zoom+
106 return true;
107 }
108 else
109 {
110 //zoom-
111 return false;
112 }
113 }
114
115 //每帧执行,在Update后
116 void LateUpdate()
117 {
118 if (target)
119 {
120 //重置摄像机的位置
121 y = ClampAngle(y, yMinLimit, yMaxLimit);
122 var rotation = Quaternion.Euler(y, x, 0);
123 var position = rotation * (new Vector3(0.0f, 0.0f, -distance)) + target.transform.position;
124
125 transform.rotation = rotation;
126 transform.position = position;
127 }
128 }
129 float ClampAngle(float angle, float min, float max)
130 {
131 if (angle < -360)
132 angle += 360;
133 if (angle > 360)
134 angle -= 360;
135 return Mathf.Clamp(angle, min, max);
136
137 }
138
139 }
3、然后在游戏运行的时候左右、上下滑动鼠标即可,也可以滚动鼠标滚轮
第二种:目前我没有测试,手上没有安卓机,有条件的可以进行测试一下。
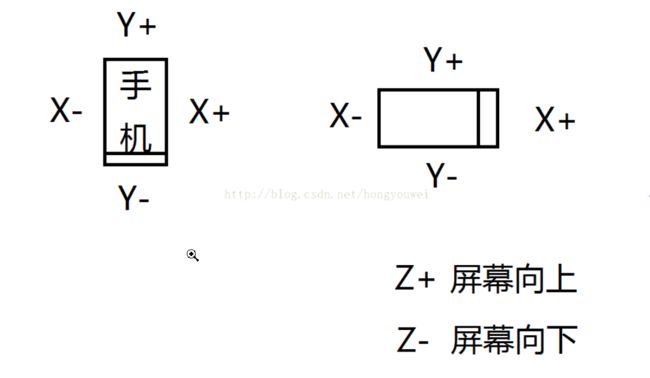
1、首先我们先了解移动端手机陀螺仪的向量方向。
Unity中重力感应的取值范围时 -1.0~1.0
X轴:home按键在下手机面朝天
向右旋转90度重力分量为1.0
向左旋转90度重力分量为-1.0
Y轴:Home按键在上手机背面朝自己重力分量为1.0
Home按键在下手机面朝自己重力分量为-1.0
Z轴:手机面朝地面重力分量为1.0
手机面朝天空重力分量为1.0
2、新建一Sphere,然后为其赋予材质,注意材质的Shader类型为:Mobile/particles/Alpha Blended,然后将做好的全景图贴上去
3、在摄像机上附加以下脚本,并将相机作为Sphere的子物体即可 代码来源参考自
1 // ***********************************************************
2 // Written by Heyworks Unity Studio http://unity.heyworks.com/
3 // ***********************************************************
4 using UnityEngine;
5
6 ///