硬核干货|揭示波士顿动力机器人背后的专利技术(上)
来源:超凡知识产权,机器人大讲堂整理发布
摘要:如果说在腿足机器人领域里,有一个让人闻之色变的变态企业,那就非波士顿动力莫属了。深耕几十年的技术积累加上“不谙世事”的科研态度,使得BD一直保持在腿足机器人科研领域遥遥领先的地位。因而为了探寻BD背后的技术,机器人大讲堂邀请超凡专利的相关人员,为我们汇总了有关BD四足机器人的相关专利,下面就让我们一起寻迹BD背后的技术。
波士顿机器人是一个千变万化的风情万种的适应力极强的美男子~时而沉静的像一头牛,时而疯狂的像脱缰野马,真的是上天遁地,无所不能— —不要觉得小编夸张,夸张不足以展示波士顿动力机器人的全部风姿。
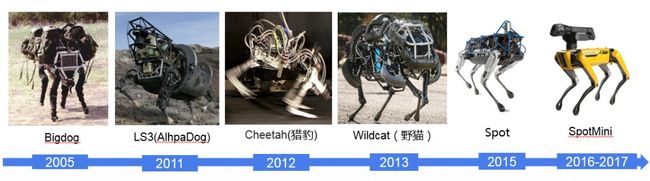
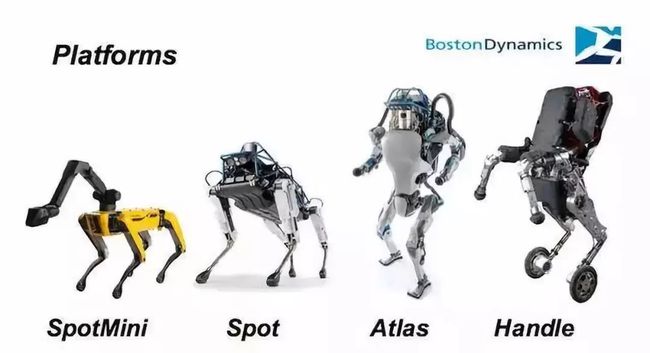
波士顿动力四足机器人的发展历程(前世今身)
相比于轮式或履带机器人,波士顿足式机器人具有更强的地形适应能力,身体十分灵活,可以在各种崎岖不平的地面行走(野外生存能力极强)。
奔跑性能极强的Wildcat
平衡力极强的Spot
不惧摔倒的SpotMini
欢乐起舞的新版SpotMini
经过一年年的技术迭代,波士顿动力的四足机器人不在仅仅是应对军方的大狗机器人,而越来越变得小巧灵活,适应力极强。
为了探索其背后的技术路线,我们对波士顿动力申请的专利进行了检索分析:
波士顿专利布局情况
对小波的主要申请人Boston Dynamics进行检索,检索截止日期为2019年1月,其中涉及机器人的专利文献共有72篇,对其进行简单统计,可以得到如下结果:
波士顿动力的专利申请态势图
可以看出:从2001~2011年,波士顿共申请了4件有关足式机器人的专利,这十年是足式机器人技术的探索阶段,即专利布局的早期阶段;从2014年开始,波士顿动力在足式机器人的不同技术维度开始进行专利布局,直至2017年都保持了较高的申请量,这期间不断推出了足式机器人的改进版,于2016-2017年推出的SpotMini是更新换代的产品(爬楼梯的SpotMini),为其商业化应用奠定了基础。
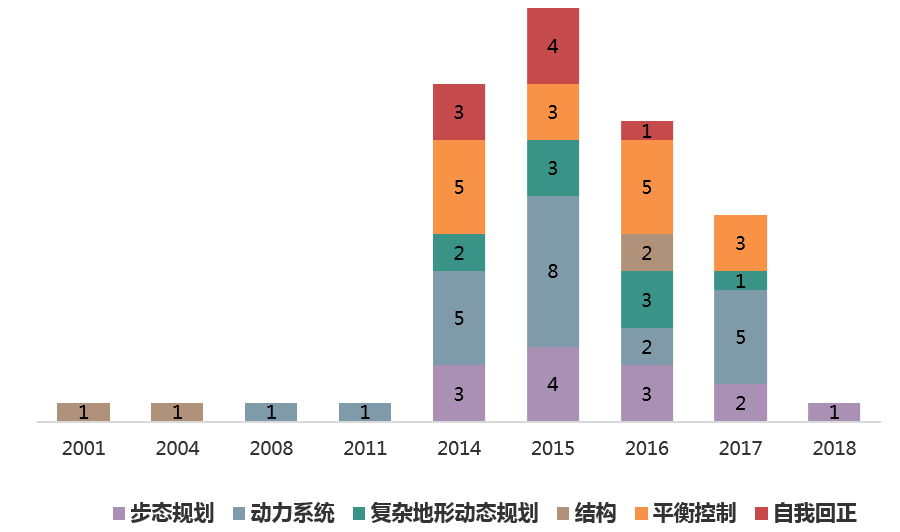
如下图所示,通过对上述72篇专利进行分类标引,波士顿动力四足机器人的技术领域主要涉及液压驱动和电液混合驱动,上述技术保证了机器人具有较强的运动能力,而步态规划、平衡控制、复杂地形动态规划以及自我回正属于机器人的运动控制,同时也是波士顿的核心技术,上述技术使机器人更好的适应环境,维持动态平衡,实现智能移动。
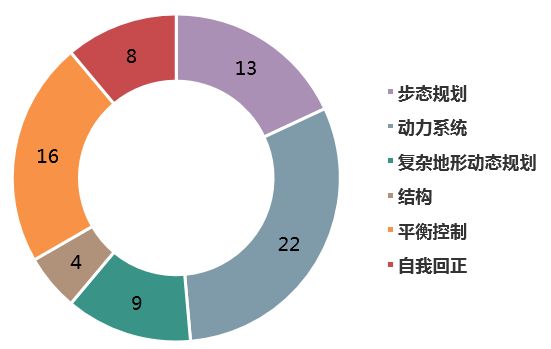
波士顿动力的专利技术分布图
下图为波士顿动力足式机器人专利技术路线图。
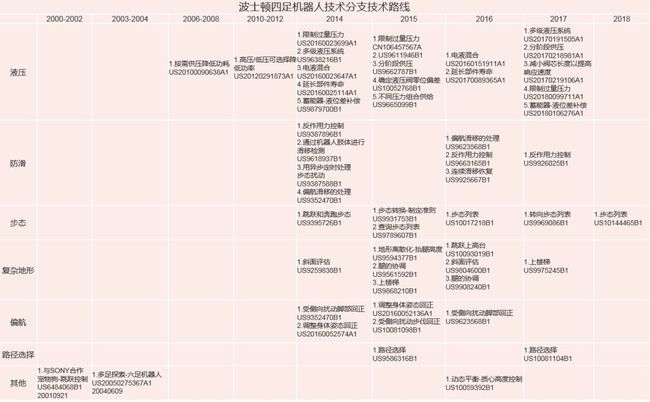
波士顿四足机器人技术路线图
1、波士顿动力早期专利
通过分析波士顿动力的专利申请趋势可发现,波士顿动力虽然成立于1992年,然而早期的专利申请多是关于离合器、轴承、医疗器械等,直至2001年9月21日才与SONY公司联合申请一种仿生宠物狗机器人专利(US6484068B1),该专利主要解决的是宠物狗机器人的跳跃控制,如下图。
US6484068B1附图
专利中将跳跃划分为两个控制阶段,第一阶段控制机器人的四个脚同时跳离地面,第二阶段控制前腿先落地后腿后落地,通过改变腿的落地角度和延迟角度实现落地。
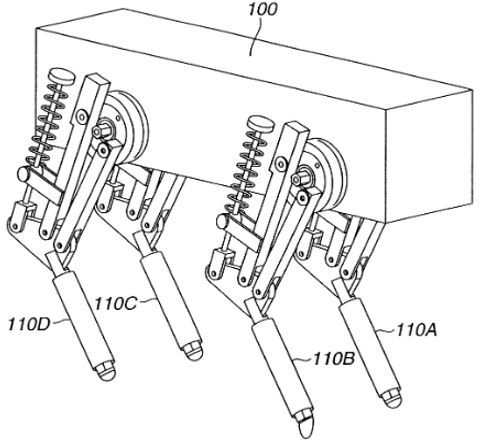
而在2004年6月9日波士顿动力独立申请了一份可以行走或爬行的多足机器人的专利US20050275367A1,设置在机身上的12个电机通过锥齿轮机构驱动六个腿的运动,如下图所示。通过这种锥齿轮机构还可实现机器人身体高度的调整。
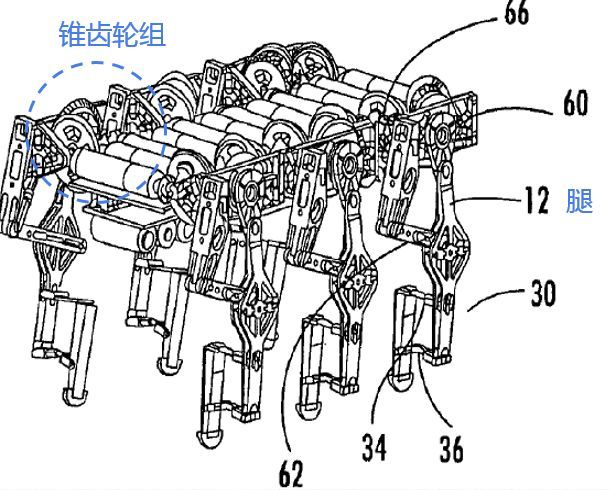
US20050275367A1附图
US20050275367A1附图
经过了前期在多足机器人领域的探索,波士顿动力在多足机器人的发展上持续改进,并将其成果进行专利布局。
2、四足机器人动力系统分析
动力问题是机器人的核心问题,关系着机器人能否动起来,工作时间的长短。波士顿动力早期的机器人主要是电机通过齿轮驱动连杆机构,对于没有载荷要求的机器人而言是足够的,对如Bigdog这类以内燃机为动力且需搭载较大负荷的机器人则显得力不从心,为此,波士顿动力在液压驱动方面布局了较多专利,如下图的液压控制技术发展路线。
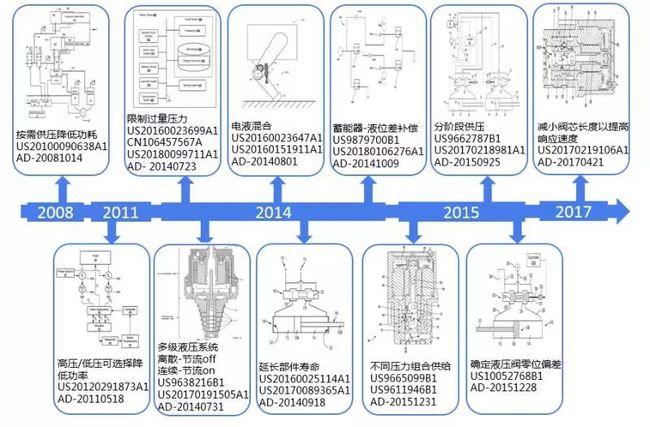
波士顿动力液压控制发展路线图
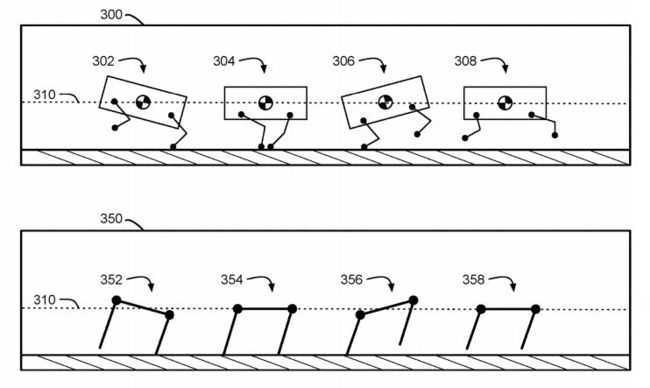
BigDog系统能耗高的问题突出,能量的多次转换、多环节传递造成了大能量损失,如下图所示为足式机器人在前行中理想的足部轨迹,腿部的运动是通过液压系统实现,在理想轨迹下机器人可降低液压驱动能耗。
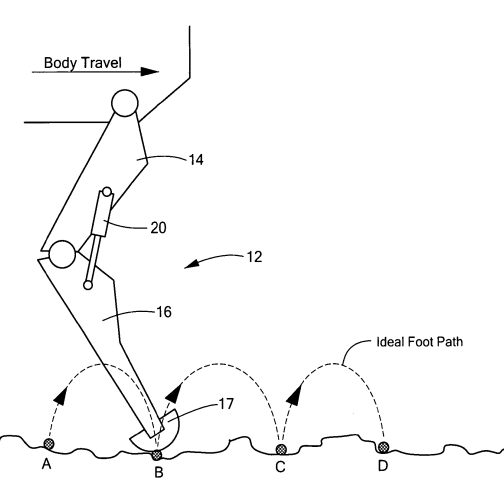
足部理想轨迹图
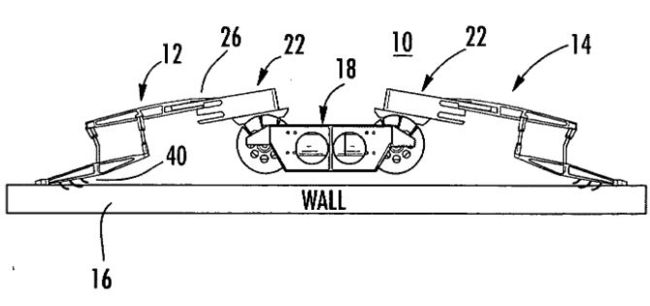
足式机器人在不同场合需要不同的功率供给,具有不同功率模式切换是降低功耗的重要手段,为此,波士顿动力在2008年10月14日提交的专利US20100090638A1中通过传感器检测力,控制器控制阀适时进行开关动作,实现按需高功率或者低功率模式。在此基础上,波士顿动力在2011年5月18日提交的专利申请US20120291873A1中公开了一种具有高压油路,中压油路和低压返回油路的液压系统,如下图所示。
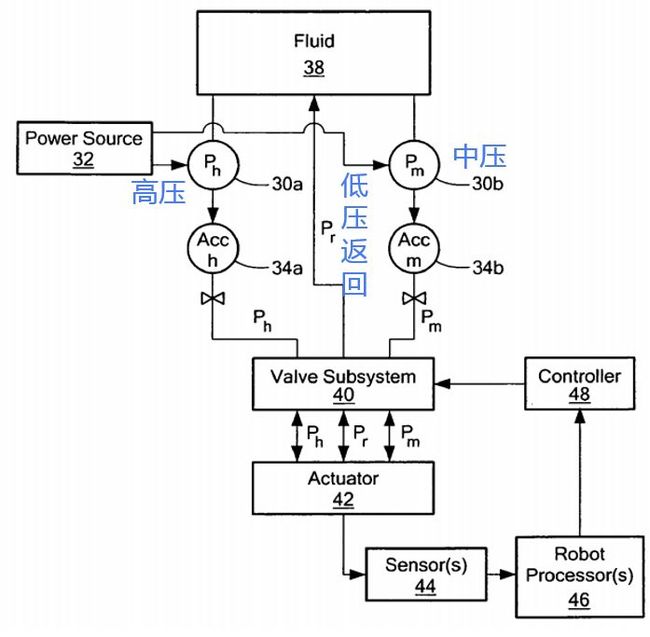
US20120291873A1附图
为了提高机器人运行的效率、减小功率消耗以及提高运动的稳健性,波士顿动力在2014年8月1日提交的专利US20160023647A1中通过判断关节承受的载荷类型和大小,以选择适当的液压或电动致动器,使得机器人的功率消耗最低。如下图所示,机器人根据不同的负载选择不同的驱动方式组合。
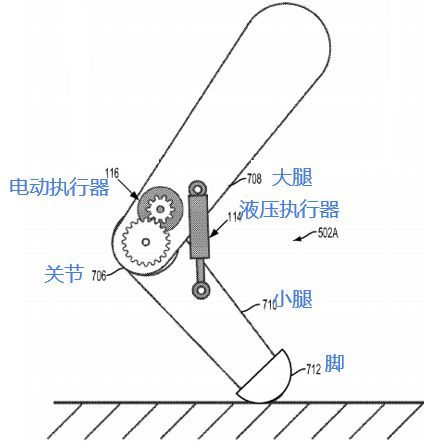
US20160023647A1附图
下图是机器人的期望驱动力,期望的力为液压驱动力和电驱动力的总和,液压驱动为离散力,电驱动为连续的力,两种驱动方式相互补充从而形成期望的力,达到最佳的驱动效率。
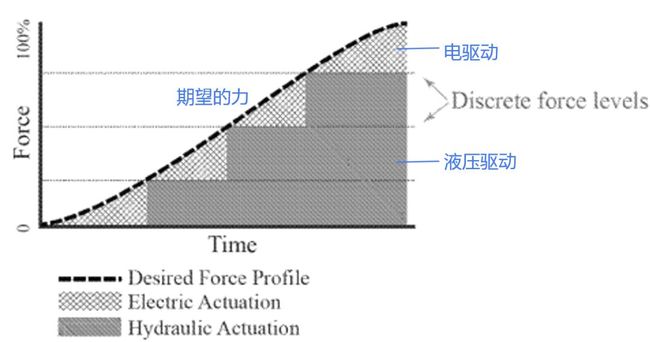
US20160023647A1附图
比外,波士顿动力还在提高液压系统的稳定供压、通过不同压力组合、分阶段供压、提高液压部件损坏工作寿命、提高阀的响应速度等方面均进行了专利布局。以上这些专利中的技术均用于保证液压系统高效和可靠工作。
3、四足机器人步态分析
在解决了动力方面的问题后,还需解决机器人如何动的问题。四足机器人在行进时不同的时间段需要不同的行进速度,而不同的行进速度对应不同的步态,四足机器人的步态包括Walk(慢走)、Trot(小跑)、Bounding(跳跃)、Gallop(飞奔)。
Wildcat奔跑转向
上图中的Wildcat正在以Bounding步态奔跑并完成了奔跑状态下的转向,整个过程都很流畅。可看出波士顿动力已经很好的解决了机器人在各种速度下的步态转换。下面将波士顿动力在该方面的专利进行如下分析。
3.1步态转换
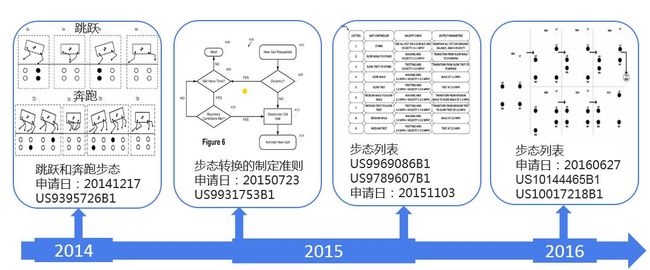
步态转换技术发展
通过检索,波士顿动力在步态转换方面先后申请了6件专利,其技术发展如上图所示,主要涉及如何实现不同步态、制定步态转换准则、制定步态列表等。
3.2步态控制和转向
Trot
Gallop
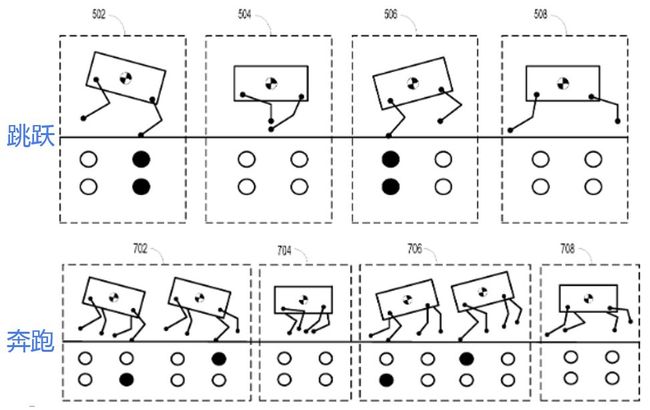
波士顿动力在2014年12月17日申请且已授权的专利US9395726B1中公开了机器人通过控制俯仰角、高度、速度以及其产生的力实现不同的步态,下图所示,Bound步态用于完成一般奔跑,而Gallop步态适合于高速奔跑。
US9395726B1附图
而当机器人需要转向时,可通过横向移动侧方的两条腿并配合转动和偏航角来实现机器人整体的转弯,如下图所示。
US9395726B1附图
3.3.制定步态准则
基于上篇专利涉及的不同步态,波士顿动力为实现各种步态转换制定了步态准则,并在2015年7月23日申请且已授权的专利US9931753B1中公开了可自动实现所需步态的转换的方法,通过识别当前的步态信息,根据不同的操作标准判断当前的步态是否属于其中,并按照其中的一种步态行走。
3.4.制定步态列表
波士顿动力为实现各种步态的顺利转换,制定了步态列表并可查询,其在2015年11月3日申请且已授权的专利US9789607B1,以及在2016年06月27日申请且已授权的专利US10017218B1中均公开了基于转向命令使足式机器人实现目标步态, US9789607B1侧重于不同步态列表的查询、US10017218B1侧重于相同步态的腿的行走顺序并避免失步,如下图所示为制定的步态列表。
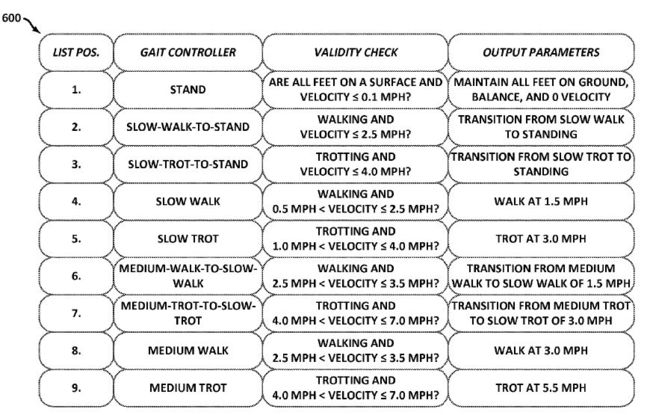
US9789607B1附图
根据不同的速度区间设计不同步态,并排列成步态列表,在机器人内部存储有多个步态列表。实际操作中,根据机器人的行走速度判断所处的状态,遍历列表,直至获得相符的步态,进而控制机器人以相关步态行走。
US9789607B1附图
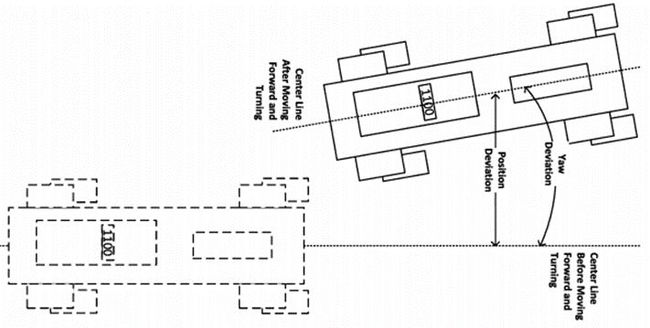
该专利中再次涉及了机器人通过步态调整实现转向,如上图所示,当机器人遇到障碍物时,机器人通过转向避开障碍,机器人根据偏航偏差和位置偏差进行转向。该专利中还涉及了Walk和Trot的切换方式,如下图所示,在416后切换为500,进而开始Trot步态。
Walk转Trot
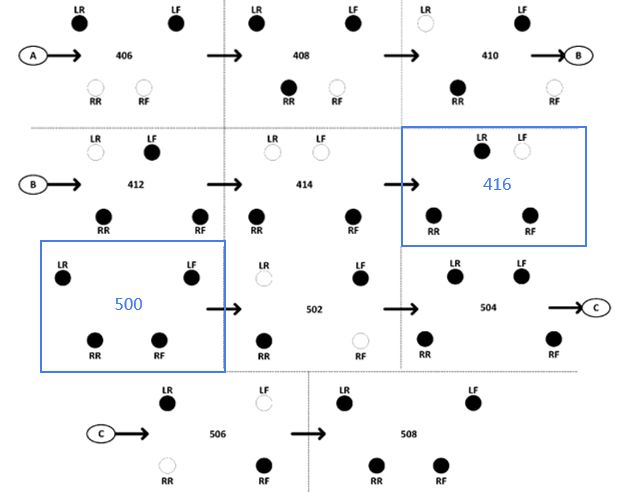
US9789607B1中的Walk和Trot转换
3.5.保持前后重心高度一致
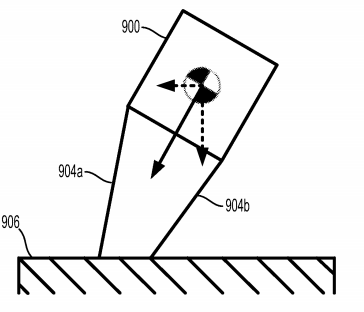
机器人在行进中,由于诸多原因导致重心发生倾斜,处于悬空状态下的迈步腿根据当前支撑腿及机身的状态选择正确的落地位置,保证机体重心落在稳定区域之内,基于此,波士顿动力在2016年6月27日申请且已授权的专利US10059392B1中公开了一种控制具有非恒定俯仰角和高度的机器人装置,通过调整机器人前后部分的质心位置可以使保证机器人在奔跑中保持机身重心高度一致,如下图。
US10059392B1附图
如果硬要给波士顿动力的四足机器人划定一个界限,以上便是其四足机器人的前世。
采用液压控制,采用控制阀、高低压选择供压的方式降低系统能耗,采用离散/连续控制、蓄能器、压力预测、不同液压压力、分阶段供压组合的方式保证机器人足够的压力供给的;早期聚焦的是如何实现四足机器人的不同步态,让它有不同的风姿~
如今的Spot及SpotMini中采用电液混合的方式驱动降低能耗,专注于不同步态之间的转换,通过制定转换准则从而制定步态列表,来实现其更灵活多变的姿态,或是说更像一只活灵活现的小狗。
未来智能实验室是人工智能学家与科学院相关机构联合成立的人工智能,互联网和脑科学交叉研究机构。
未来智能实验室的主要工作包括:建立AI智能系统智商评测体系,开展世界人工智能智商评测;开展互联网(城市)云脑研究计划,构建互联网(城市)云脑技术和企业图谱,为提升企业,行业与城市的智能水平服务。
如果您对实验室的研究感兴趣,欢迎加入未来智能实验室线上平台。扫描以下二维码或点击本文左下角“阅读原文”
