近几年目标跟踪算法发展综述(下)
2016年
VOT2016【Index】今年算法比赛结果没什么特别大的意外,CNN和结合深度特征的算法都排名靠前,没毛病。今年你知道主办方干了一件大好事,就是把所能搜集到的算法代码都给公布了,良心啊~~~【下载地址】
需要的自己去拿吧。
下面是今年的比赛结果:

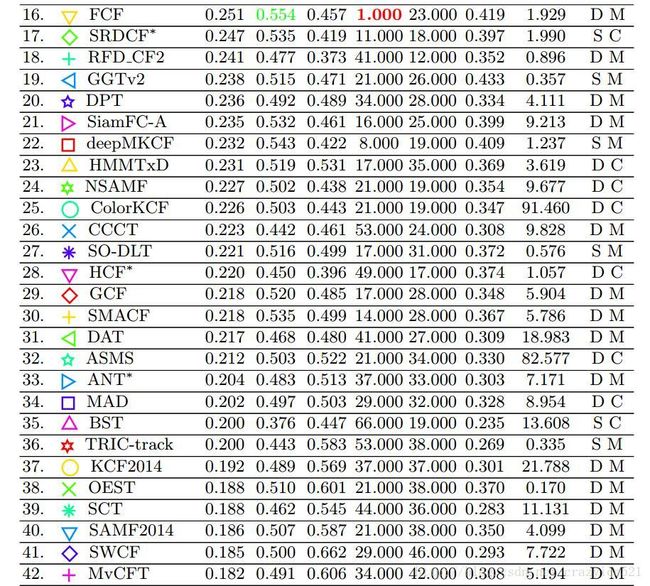


接下来就挨个介绍吧,先从第一开始。
不得不佩服Martin大神啊,今年都窜到第一了,
C-COT
Beyond Correlation Filters: Learning Continuous Convolution Operators for Visual Tracking 【Paper】 【Project】【详细介绍】这个链接是我写的一篇对本篇文章的详细介绍,直接点进去看就好,这里就不占篇幅讲解了。
TCNN:
Hyeonseob Nam, Mooyeol Baek, Bohyung Han. “Modeling and Propagating CNNs in a Tree Structure for Visual Tracking.” 【Paper】 【Project】
分支权重计算公式


目标位置预测:
Staple:
Luca Bertinetto, Jack Valmadre, Stuart Golodetz, Ondrej Miksik, Philip H.S. Torr. “Staple: Complementary Learners for Real-Time Tracking.” 【Paper】 【Project】
一张图解决战斗吧,Staple就是把HOG—KCF和颜色统计特征结合,找出目标的位置。前面说过, 相关滤波模板类特征(HOG)对快速变形和快速运动效果不好,但对运动模糊光照变化等情况比较好;而 颜色统计特征(颜色直方图)对变形不敏感,而且不属于相关滤波框架没有边界效应,快速运动当然也是没问题的,但对光照变化和背景相似颜色不好。这两类方法可以互补,也就是说DSST和DAT可以互补结合。就是Staple算法的最终结果了。
SiameseFC:
Luca Bertinetto, Jack Valmadre, João F. Henriques, Andrea Vedaldi, Philip H.S. Torr. “Fully-Convolutional Siamese Networks for Object Tracking[ Paper[ Project之后我会写一篇详细介绍Siamese网络的文章,这里就不多对Siamese介绍了。思想就是类似模版匹配。
GOTURN:
David Held, Sebastian Thrun, Silvio Savarese. “Learning to Track at 100 FPS with Deep Regression Networks.Siamese的另一个版本,之后会一起介绍。
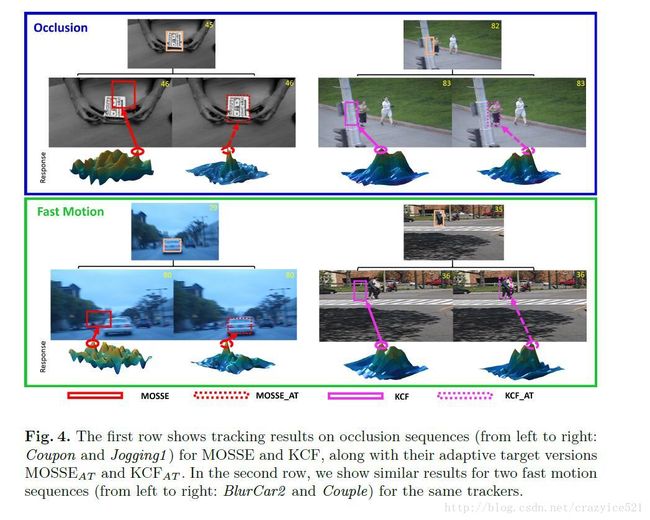
CF+AT:
Adel Bibi, Matthias Mueller, and Bernard Ghanem. “Target Response Adaptation for Correlation Filter Tracking.” 【Paper】小插曲:这篇文章必须要介绍,不得不说国外的学者还是不错的,Adel Bibi这个小哥没少给我帮助,在他上一篇文章中有一些问题没理解,这小哥直接把Skype账号给我了,电联你懂吗,可是只怪我语言差啊,没能好好交流。还是很感谢小哥的。
接下来好好说这个文章:
小哥研究认为,循环移位并不是真是的样本,只是近似真实样本的样本,在跟踪过程当中遇到快速运动和遮挡等问题的时候,这些样本变得不可信。传统的算法不能够解决算法漂移的问题。为了解决这个问题,提出一个能够自适应的改变目标回复的生成框架。当循环移位样本不可靠的时候,不去相信他,选择相信的位置,更好的对目标进行跟踪。
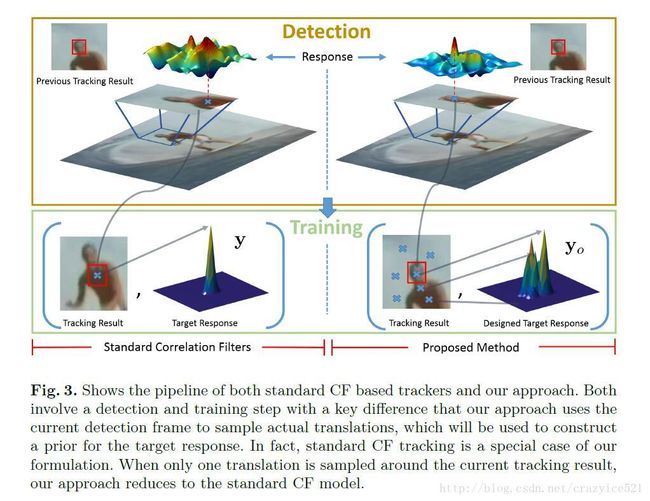
目标优化函数:

本文中,算法能够自适应的改变y值在每一帧当中。不仅仅是依赖于训练模版,也决定于上一个运动信息。
HDT:
Yuankai Qi, Shengping Zhang, Lei Qin, Hongxun Yao, Qingming Huang, Jongwoo Lim, Ming-Hsuan Yang. “Hedged Deep Tracking[ Paper[ Project这篇文章个人认为就是完全的模仿HCF来做的,虽然作者写的很花,也有幸和马超大哥当面交流过一次,问过这个小问题,马超大哥笑笑说“是给了点帮助”,你懂的。反正就是参照HCF的思想去理解这篇文章就完全没有毛病。
CNT: Kaihua Zhang, Qingshan Liu, Yi Wu, Minghsuan Yang. “Robust Visual Tracking via Convolutional Networks Without Training.”【Paper】【Project】张开华老师的文章是我一直不敢去读的文章,我害怕,至于害怕什么,大家自己体会吧,我不便多说,文章我没读过,也不妄加言论,大家自己读,自己总结吧。
2016总结:今年没什么意外,跟踪领域已经被深度学习拿下,相关滤波改进算法也算还可以HCF、KCF_SMXPC等排名中等效果也不错,存在的问题还是那些,深度学习精度提高了,但是是损失了速度之后才对算法精度提高的,这个对实时的应用来说一直存在的障碍,怎么样能够打破这种限制,其实Siamese给出了一个解决的办法,但是Siamese有他自身不足存在,对于变化过快的物体无法跟踪到。
跟踪界一直存在的两个难题也没有解决①跟踪的可靠性靠什么指标来评价;②对于完全遮挡目标的解决。虽然两个问题都有一定的方法来解决,但是不太可靠,希望后来人对这方面做出更多的贡献。