颜值估计(2)
版权声明:本篇文章为博主原创文章,码字不易,未经博主允许,不得转载:https://mp.csdn.net/postedit/80164870
本文为2015年论文《A NEW HUMANLIKE FACIAL ATTRACTIVENESS PREDICTOR WITH CASCADED
FINE-TUNING DEEP LEARNING MODEL 》的解读(点我下载)。
该论文所用的方法主要对原始图像进行了预处理,使得最终精度得到了很大程度的提升。
以往的研究中,很多基于神经网络的方法都是针对原始RGB图像进行特征提取,通过分类、回归、或者分类+回归的方式对结果进行预测。而预测方式又可以分为针对特定标签进行分类/预测与针对标签分布进行学习的方法。
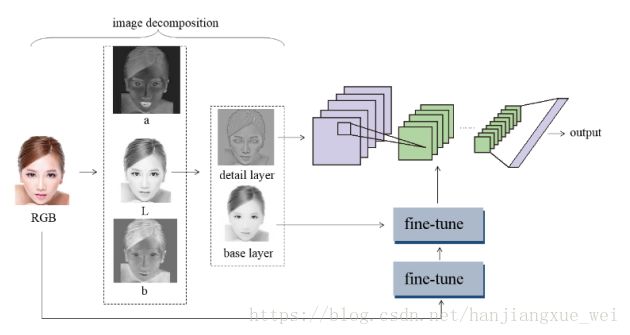
该论文中,作者受到心理学研究的启发,由于人类对人脸面部平滑度,颜色信息以及光照信息等比较敏感,因此可以通过颜色空间转换,将原始RGB图像转换到Lab颜色空间(点我查看)从而获得这些信息。在Lab空间中,L分量只控制明暗程度,a和b分量分别控制不同的颜色信息。这样就可以将原始图像转化为与人类视觉感知相一致的图像,从而能够更贴近人类视觉行为。然后对L分量进行保边滤波,从而获得图像的平滑层与细节层信息(低频与高频信息),这样便提取出了图像的平滑度信息。综合而言,算法通过对原始图像的一系列预处理,获得了人脸平滑度、颜色、光照信息等,这点与心理学研究的结果较为契合。最后在对获得的各种信息进行特征提取过程,利用神经网络对年龄进行回归,并利用皮尔逊相关(点我查看)进行准确性判定。方法较为新颖,而且得到的精度有了很大的提升。
传统的特征提取方式针对人脸年龄评估相比较神经网络而言,其效果十分有限,而且由于侧重点不同,往往传统的手工特征提取过程容易丢掉部分信息,导致评估结果并不是十分高。而神经网络,大家都知道,其在特征提取方式上面拥有很大的优势,这方面的比较,可以通过很多论文得到验证,在此不再进行赘述。
-------------------------------------------------------------------------------------------------------------------------
算法使用的数据集为SCUT-FBP,流程图如下:
算法具体有一下几个步骤:
一、颜色空间转换
这块知识在一般的图像处理书上讲解较少,大部分颜色空间转换都集中在RGB->XYZ, RGB->CMY/CMYK, RGB->HSI上面。而将RGB->Lab空间方面的介绍却比较少,上网查了很多博客,针对这方面处理也有部分讲解,一般来讲可以通过将RGB图像先转换到XYZ颜色空间,然后再将XYZ空间的结果转换到Lab空间。可以参考一下:(点我打开)。这里本人根据其c++代码编写了了一个python的实现代码,希望可以帮到有需要的朋友。
#coding=utf-8
from PIL import Image
import numpy as np
import os
import math
#原始图像路径
image_path = r'\图像地址\'
rows, cols, channels = 224, 224, 1
def gamma(im_channel):
return ((im_channel+0.055)/1.055)**2.4 if im_channel > 0.04045 else im_channel / 12.92
def f(im_channel):
return im_channel**1/3 if im_channel > 0.008856 else 7.787 * im_channel + 0.137931
def convert_image(image_path, rows,cols, channels, mode):
#读入图像
imgs = os.listdir(image_path)
num = len(imgs)
#创建保存结果的矩阵
L_ = np.zeros((num, rows, cols, channels), dtype=np.float32)
a_ = np.zeros((num, rows, cols, channels), dtype=np.float32)
b_ = np.zeros((num, rows, cols, channels), dtype=np.float32)
for i in range(num):
img = Image.open(im) #resize到想要的大小 img = img.resize((rows, cols))
#获取像素
pix = img.load()
for x in range(rows):
for y in range(cols):
# 获得三个通道值
r, g, b = pix[x, y]
#伽马映射
R = gamma(r/255.0)
G = gamma(g/255.0)
B = gamma(b/255.0)
#转换到XYZ空间
X = 0.412453 * R + 0.357580 * G + 0.180423 * B
Y = 0.212671 * R + 0.715160 * G + 0.072169 * B
Z = 0.019334 * R + 0.119193 * G + 0.950227 * B
#对XYZ空间进行归一化
X /= 0.95047
Y /= 1.0
Z /= 1.08883
#对XYZ空间进行映射
FX = f(X)
FY = f(Y)
FZ = f(Z)
#转换到Lab空间
L_[i, x, y, channel] = 116 * FY - 16 if Y > 0.008856 else 903.3 * Y
a_[i, x, y, channel] = 500 * (FX - FY)
b_[i, x, y, channel] = 200 * (FY - FZ)当然,我们其实可以不用这么复杂。python、matlab和opencv都有相应的函数,直接调用函数就可以返回我们的结果。
在python中,可以使用skimage这个图像处理库来进行转换:
skimage.color.rgb2lab(rgb)在matlab中,相应的函数为:
I = rgb2lab(image)得到的颜色空间是在Lab颜色空间的规定范围内(L: [0, 100], a: [-128, 127], b: [-128, 127]
在opencv中,相应的函数为:
cvCvtColor(image, lab_image, CV_BGR2LAB) 具体两者转化之后的区别,本人认为前者应该是最为标准的,而后者是经过映射之后的结果,也就是将得到结果的负数部分映射到正数区间内,这样在显示的时候就可以直接显示了。
经过颜色空间转化之后,便得到了L、a、b三部分的信息,分别表示光照明暗、颜色信息a、颜色信息b。
这里上个图片看下效果:
L  a
a b
b
二、最小二乘加权滤波
这个滤波方式与双边滤波、引导滤波等都是图像保边滤波的经典。其原理都是通过在图像相对较为平坦的区域(低频信息)进行强滤波,而在图像的边角、目标边缘(高频信息)部分进行弱滤波,这样便可以在平滑图像的同时保持图像边缘部分受损失最小,从而保留图像的更多细节信息。
这部分内容可以参考(链接)。其matlab代码如下:
function OUT = wlsFilter(IN, lambda, alpha, L)
%WLSFILTER Edge-preserving smoothing based on the weighted least squares(WLS)
% optimization framework, as described in Farbman, Fattal, Lischinski, and
% Szeliski, "Edge-Preserving Decompositions for Multi-Scale Tone and Detail
% Manipulation", ACM Transactions on Graphics, 27(3), August 2008.
%
% Given an input image IN, we seek a new image OUT, which, on the one hand,
% is as close as possible to IN, and, at the same time, is as smooth as
% possible everywhere, except across significant gradients in L.
%
% 最小二乘加权滤波器
% Input arguments:
% ----------------
% IN Input image (2-D, double, N-by-M matrix).
%
% lambda Balances between the data term and the smoothness
% term. Increasing lambda will produce smoother images.
% Default value is 1.0
%
% alpha Gives a degree of control over the affinities by non-
% lineary scaling the gradients. Increasing alpha will
% result in sharper preserved edges. Default value: 1.2
%
% L Source image for the affinity matrix. Same dimensions
% as the input image IN. Default: log(IN)
%
%
% Example
% -------
% RGB = imread('peppers.png');
% I = double(rgb2gray(RGB));
% I = I./max(I(:));
% res = wlsFilter(I, 0.5);
% figure, imshow(I), figure, imshow(res)
% res = wlsFilter(I, 2, 2);
% figure, imshow(res)
if(~exist('L', 'var'))
L = log(IN+eps);
end
if(~exist('alpha', 'var'))
alpha = 1.2;
end
if(~exist('lambda', 'var'))
lambda = 1;
end
smallNum = 0.0001;
[r,c] = size(IN);
k = r*c;
% Compute affinities between adjacent pixels based on gradients of L
dy = diff(L, 1, 1); %对L矩阵的第一维度上做差分,也就是下面的行减去上面的行,得到(N-1)xM维的矩阵
dy = -lambda./(abs(dy).^alpha + smallNum);
dy = padarray(dy, [1 0], 'post');%在最后一行的后面补上一行0
dy = dy(:);%按列生成向量,就是Ay对角线上的元素构成的矩阵
dx = diff(L, 1, 2); %对L矩阵的第二维度做差分,也就是右边的列减去左边的列,得到Nx(M-1)的矩阵
dx = -lambda./(abs(dx).^alpha + smallNum);
dx = padarray(dx, [0 1], 'post');%在最后一列的后面添加一列0
dx = dx(:);%按列生成向量,对应上面Ay的对角线元素
% Construct a five-point spatially inhomogeneous Laplacian matrix
B(:,1) = dx;
B(:,2) = dy;
d = [-r,-1];
A = spdiags(B,d,k,k);
%把dx放在-r对应的对角线上,把dy放在-1对应的对角线上
e = dx;
w = padarray(dx, r, 'pre'); w = w(1:end-r);
s = dy;
n = padarray(dy, 1, 'pre'); n = n(1:end-1);
D = 1-(e+w+s+n);
A = A + A' + spdiags(D, 0, k, k);%A只有五个对角线上有非0元素
% Solve
OUT = A\IN(:);%
OUT = reshape(OUT, r, c);f = imread(image); %注意,这里的image为上一步得到Lab空间中的结果 L_
f = double(f);
I = f./max(f(:));
smooth = wlsFilter(I, 0.5); %平滑,后面参数可以自行选取
detail = I - smooth;#细节通过以上滤波过程,便得到了L空间中的平滑度信息与细节信息,综合以上信息,算法便获得了原始图像的平滑度信息smooth,细节信息detail, 颜色信息a, 颜色信息b,当然也还有原始RGB图像。
这里上个图片看下效果
smooth  detail
detail
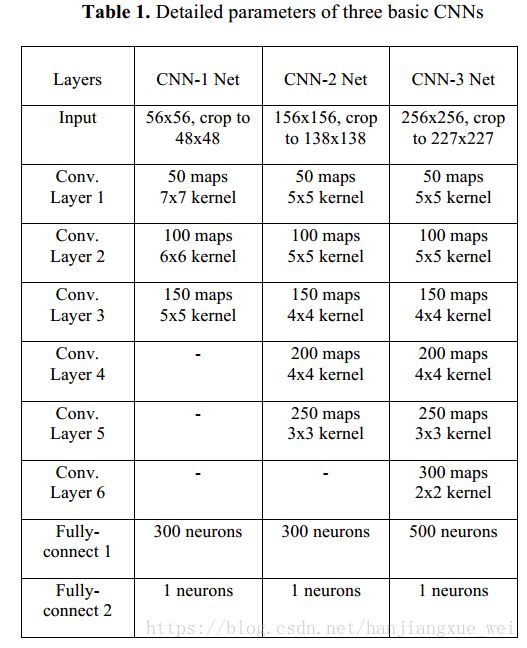
三、网络结构
前面所做的铺垫都是为了给神经网络进行特征提取,然后进行回归。
这里作者使用了三种类型的网络,并且进行了对比,结果如下:
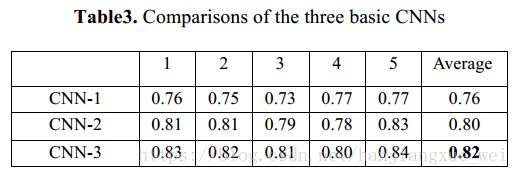
其中,上图中的1-5表示作者进行了5-fold的交叉验证。最终结果为交叉验证结果的均值。当然,结果也表明,深层的网络有更强的特征提取能力,预测准确度也比浅层网络更高。
四、训练步骤
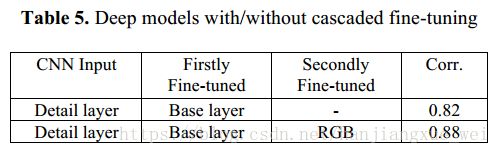
1、将得到的细节信息detail 首先喂给网络进行训练,训练达到一定的次数之后,再将平滑度信息smooth喂给网络,进行微调;最终将原始RGB图像再喂给网络,进行进一步微调。作者通过实验验证了这种方式的效果最好。对比如下:
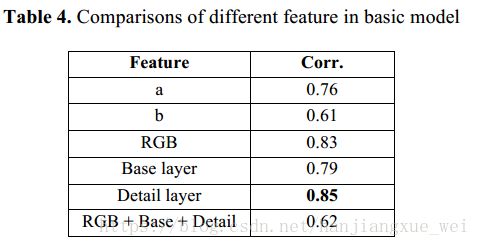
注意, 在Table4 中,Base layer指的的图像的平滑度图像,也就是我们代码中的smooth。作者分别利用得到的不同信息进行了训练,之后发现用细节层训练结果的预测准确率最高,反而在用原始RGB图像进行预训练,用平滑度图像和细节层图像进行微调后,效果比较低,具体原因作者也并不是十分明白。总而言之,作者便决定使用了细节层进行网络的预训练。
在Table5中,我们可以看到,经过细节层的预训练之后,利用smooth图像与RGB图像进行微调之后的结果,能够达到88%的相关度,效果提升非常明显。但具体为什么会这样,目前作者也不是特别清楚。
---------------------------------------------------------------------------------------------------------
文章也介绍完了,不过本人发现,作者在经过颜色空间转换之后,其实只用到了 L 亮度信息,并没有颜色信息加入(只是利用a、b信息进行了对比),而是在后面进行微调的时候,用到了RGB颜色信息。这有点让我不太理解。难道说,对于人脸图像来说,只利用其亮度信息就能够达到82%的效果,那人脸本身的颜色、光照、纹理等因素对人脸的影响就比较小?还是出于偶然,对于SCUT-FBP数据集,恰好明暗信息就能够表达出这样的结果?