Matlab 实现显著性检测模型性能评价算法之AUC
一,AUC预备知识:
1. 常用来评价一个二分类器的优劣。
2. 很多学习器是为测试样本产生一个实值或概率预测,然后这个预测值与一个分类阈值进行比较,若大于阈值则为正类,否则为反类。
3. 实际上,根据这个实值或概率预测结果,可以将测试样本进行排序,"最可能"(实值或概率预测最大)是正例的排在最前面,“最不可能”是正例的排在最后面。这个,分类过程就相当于在这个排序中以某个“截断点”(即阈值)将样本分为两部分,前面为正,后面为反。
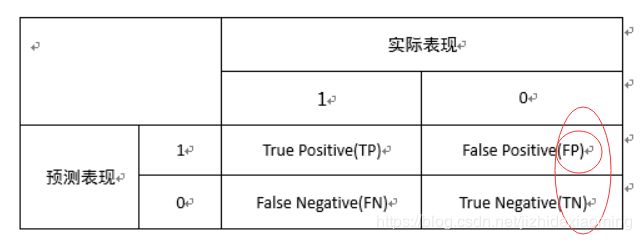
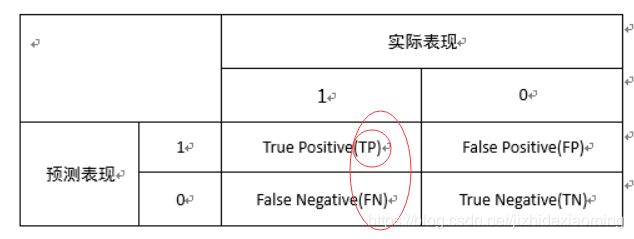
4. TP: 真正类,真实为正类,预测也为正类;
FP: 假正类,真实为负类,预测为正类;
TPR: 真正类率,TPR=TP/(TP+FN),正确预测为正类占所有实际为正类样本的比例(所有实际为正类中被预测为正类的比例);
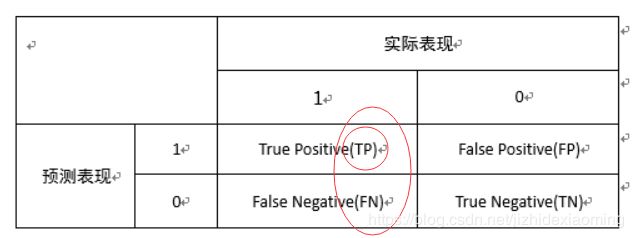
FPR: 假正类率,FPR=FP/(FP+TN),错误预测为正类占所有实际为负类样本的比例(实际为负类的样本中被预测为正类的比例)。
在显著性检测领域,生成的显著图的每个像素即为一个样本,显著图的像素按从大到小排序,然后从第一个(像素值最大)依次作为阈值,对所有像素进行分类,然后求得一组TPR, FPR。再以第二大的像素值为阈值,又可以得到一组。以FPR为横轴,以TPR为纵轴,即可得到ROC曲线,如下,ROC曲线的面积值即为AUC (area under curve)
5. 顺带提下准确率和召回率 (可以跳过)
Precision = TP/(TP+FP),正确预测为正类的样本占所有预测为正类的比例,被预测为显著像素中实际为显著像素的比例

Recall = TP/(TP+FN),正确预测为正类的样本占所有实际为正类样本的比例,实际为显著像素中被预测(召回)为显著像素的比例,发现就是TPR
二,ROC和AUC值

1,Matlab实现,算出auc = 0.8895,利用gongAUC_Judd.m,算出的auc = 0.8872
clear;
clc;
smap_full_path = strcat('D:\Code\Matlab\Map\smap.jpg');
gmap_full_path = strcat('D:\Code\Matlab\Map\gmap.jpg');
smap = imread(smap_full_path);
gmap = imread(gmap_full_path);
gmap = imresize(gmap,size(smap));
smap = imresize(smap,0.1);
gmap = imresize(gmap,0.1);
% 二值化ground truth map, 只要两类
thresh_value = graythresh(gmap);
final_gmap = im2bw(gmap, thresh_value);
% smap归一化到[0,1]
smap = mat2gray(smap);
%
% [score,tp,fp,allthreshes] = AUC_Judd(smap, final_gmap, 1, 1);
% 数组
smap_array = smap(:);
gmap_array = final_gmap(:);
% 总真实为正例数
idex = find(gmap_array == 1);
P_num = length(idex);
% 总真实为负例数
N_num = length(gmap_array) - P_num;
% 从大到小排序,orig_location保存了排序前像素在smap_array的位置
[saliency_values, orig_location] = sort(smap_array, 'descend');
% TP(1) = 0; FP(1) = 0;
% TP(end) = 1; FP(end) = 1;
% 当以salicy_values(i)为阈值时,前面数组saliency_values前面i个都判为正例
for i=1:length(saliency_values)
% 查看前i个被判为正例的像素,真实情况如何。
TP(i) = 0; % 真正例,真实为正例,预测也为正例;
FP(i) = 0; % 假正例,真实为负例,预测为正例;
for m=1:i
if gmap_array(orig_location(m)) == 1
TP(i) = TP(i) + 1;
else
FP(i) = FP(i) + 1;
end
end
FPR(i) = FP(i) / N_num;
TPR(i) = TP(i) / P_num;
end
auc = trapz(FPR,TPR); % 以FPR为x轴,以TPR为y轴,算积分,即为ROC下的面积
plot(FPR, TPR, '.b-'); title(['Area under ROC curve: ', num2str(auc)])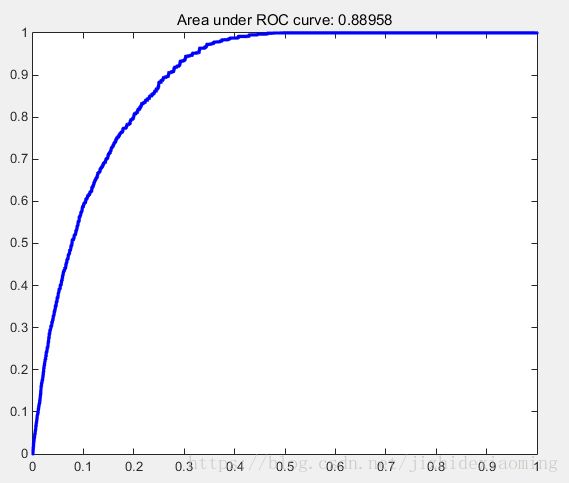
2, AUC_Judd.m
% created: Tilke Judd, Oct 2009
% updated: Zoya Bylinskii, Aug 2014
% This measures how well the saliencyMap of an image predicts the ground
% truth human fixations on the image.
% ROC curve created by sweeping through threshold values
% determined by range of saliency map values at fixation locations;
% true positive (tp) rate correspond to the ratio of saliency map values above
% threshold at fixation locations to the total number of fixation locations
% false positive (fp) rate correspond to the ratio of saliency map values above
% threshold at all other locations to the total number of posible other
% locations (non-fixated image pixels)
function [score,tp,fp,allthreshes] = AUC_Judd(saliencyMap, fixationMap, jitter, toPlot)
% saliencyMap is the saliency map
% fixationMap is the human fixation map (binary matrix)
% jitter = 1 will add tiny non-zero random constant to all map locations
% to ensure ROC can be calculated robustly (to avoid uniform region)
% if toPlot=1, displays ROC curve
if nargin < 4, toPlot = 0; end
if nargin < 3, jitter = 1; end
score = nan;
% If there are no fixations to predict, return NaN
if ~any(fixationMap)
disp('no fixationMap');
return
end
if any(saliencyMap(:))
saliencyMap = saliencyMap/sum(saliencyMap(:));
end
if any(fixationMap(:))
fixationMap = fixationMap/sum(fixationMap(:));
end
% % make the saliencyMap the size of the image of fixationMap
% if size(saliencyMap, 1)~=size(fixationMap, 1) || size(saliencyMap, 2)~=size(fixationMap, 2)
% saliencyMap = imresize(saliencyMap, size(fixationMap));
% end
% jitter saliency maps that come from saliency models that have a lot of
% zero values. If the saliency map is made with a Gaussian then it does
% not need to be jittered as the values are varied and there is not a large
% patch of the same value. In fact jittering breaks the ordering
% in the small values!
% if jitter
% % jitter the saliency map slightly to distrupt ties of the same numbers
% saliencyMap = saliencyMap+rand(size(saliencyMap))/10000000;
% end
% % normalize saliency map
% saliencyMap = (saliencyMap-min(saliencyMap(:)))/(max(saliencyMap(:))-min(saliencyMap(:)));
%
% if sum(isnan(saliencyMap(:)))==length(saliencyMap(:))
% disp('NaN saliencyMap');
% return
% end
S = saliencyMap(:);
F = fixationMap(:);
Sth = S(F>0); % sal map values at fixation locations
Nfixations = length(Sth);
Npixels = length(S);
allthreshes = sort(Sth, 'descend'); % sort sal map values, to sweep through values
tp = zeros(Nfixations+2,1);
fp = zeros(Nfixations+2,1);
tp(1)=0; tp(end) = 1;
fp(1)=0; fp(end) = 1;
for i = 1:Nfixations
thresh = allthreshes(i);
aboveth = sum(S >= thresh); % total number of sal map values above threshold
tp(i+1) = i / Nfixations; % ratio sal map values at fixation locations above threshold
fp(i+1) = (aboveth-i) / (Npixels - Nfixations); % ratio other sal map values above threshold
end
score = trapz(fp,tp);
allthreshes = [1;allthreshes;0];
if toPlot
% subplot(121); imshow(saliencyMap, []); title('SaliencyMap with fixations to be predicted');
% hold on;
% [y, x] = find(fixationMap);
% plot(x, y, '.r');
% subplot(122);
plot(fp, tp, '.b-'); title(['Area under ROC curve: ', num2str(score)])
end
注:常用的显著性检测论文及代码汇总