强化学习论文(5): Learning Latent Dynamics for Planning from Pixels
Google Brain,Deepmind 提出的 PlaNet
论文地址:https://danijar.com/publications/2019-planet.pdf
源码地址:https://github.com/google-research/planet
摘要
planning(规划)对已知环境转移动态的控制任务非常成功,如需在未知环境中使用 planning,则 agent 需要通过环境交互学习转移动态。然而,学到足够精确支持 planning 的转移动态模型是一项长期挑战,特别是在图像领域。
本文提出 Deep Planning Network (PlaNet),是一个model-based agent,能够:
- 从图像中学习环境转移动态;
- 通过在隐空间进行快速在线 planning 来选择动作。
要实现高性能,转移动态模型必须能精确预测多个时间步之后的 reward。为达成这一目标,本文使用了一个隐动态模型,包含确定性和随机性组件。同时,本文还提出了一个多步变分推断目标,记为 latent overshooting.
本文所提出的 agent 仅使用像素观察,来解决部分可观测,稀疏 reward 的控制问题,超出了以往 model-based方法解决问题的难度。其表现与 model-free 方法相当,而样本量更少。
背景介绍
学习转移动态模型最主要的困难包括:模型的准确性,多步预测累积的误差,未能捕获未来丰富的可能性,以及对训练分布的过拟合造成的泛化失败。
使用学习得到的模型进行 planning,相比 model-free 方法有以下几点好处:
- model-based planning 方法更加 data-efficient(数据依赖小),因为它对训练信号的使用更充分,并且不需要通过贝尔曼方程传递 reward;
- 以增加对 action 的搜索为计算代价,planning 提高了agent 的表现
- 学到的模型独立于特定任务,有潜力通过转化服务于相同/似环境下的其他任务。
近期的工作已经展示了在简单低维情形下学习转移动态的优势,但这些工作都假定已知环境的底层状态和明确的reward函数,这在现实应用中并不可行。在高维情形下,我们希望在一个紧凑的隐空间学习转移动态以保证快速 planning。这种隐空间模型已经在简单任务上取得了成功。
一句话总结:PlaNet 发展了model-based planning 方法,解决了更困难的基于像素的连续控制问题。
主要贡献:潜空间planning,循环状态空间模型,latent overshooting(给出多步预测变分下界,改善多步预测结果).
潜空间planning
Framework
假设已有学到的转移动态模型,算法框架如下:
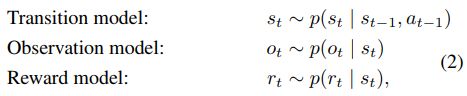
由于单一图像无法反映环境状态的全部信息,将问题建模为一个POMDP(部分可观测 markov 决策过程), s t s_t st为底层状态, o t o_t ot为环境观测, a t a_t at为连续动作向量。
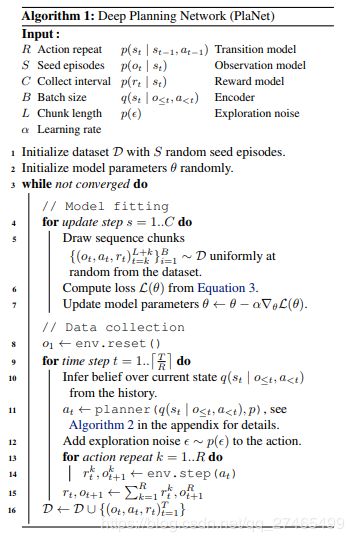
注意到PlaNet所有的建模都只针对环境,而后在环境中进行规划,并没有策略网络/值网络。同时,在交互过程中,每一步都重新做planning,以保证能够根据新的观测作出调整(与MPC类似)。
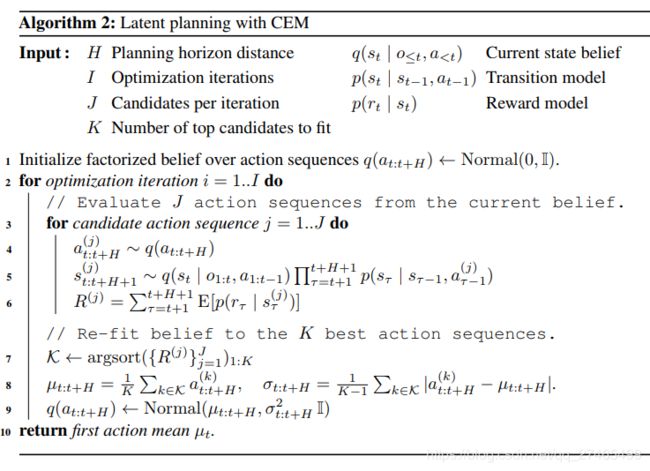
Planning 算法
Planning算法使用了CEM (cross entropy method), CEM是一种基于群体的优化方法,它能够推断出动作序列的最优分布。
模型
本文提出一个循环状态空间模型 (RSSM) 在隐空间进行前向预测,这一模型可被看作非线性Kalman滤波器或者序列VAE.
SSM
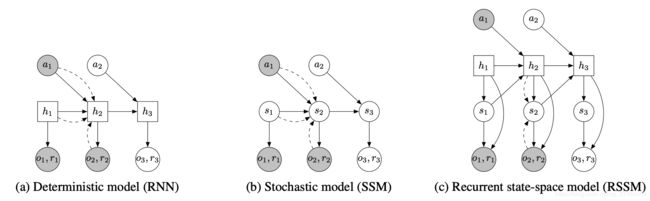
潜状态空间模型如下图b所示,下面所涉及的模型都是由神经网络参数化的高斯分布。
由于模型都是非线性的,因此无法直接计算出参数学习所需的状态后验。因此,本文使用编码器 q ( s 1 : T ∣ o 1 : T , a 1 : T ) = ∏ t = 1 T q ( s t ∣ s t − 1 , a t − 1 , o t ) q\left(s_{1 : T} | o_{1 : T}, a_{1 : T} \right)=\prod_{t=1}^{T} q\left(s_{t} | s_{t-1}, a_{t-1}, o_{t}\right) q(s1:T∣o1:T,a1:T)=∏t=1Tq(st∣st−1,at−1,ot)来从过去的观测和动作中近似推断状态后验,其中 q ( s t ∣ s t − 1 , a t − 1 , o t ) q\left(s_{t} | s_{t-1}, a_{t-1}, o_{t}\right) q(st∣st−1,at−1,ot)是一个由“卷积网络+前向网络”参数化的对角高斯分布。
为使用编码器,本文建立了一个基于数据对数似然的变分下界 (Jensen 不等式):
ln p ( o 1 : T ∣ a 1 : T ) ≜ ln ∫ ∏ t p ( s t ∣ s t − 1 , a t − 1 ) p ( o t ∣ s t ) d s 1 : T ≥ ∑ t = 1 T ( E q ( s t ∣ o ≤ t , a < t ) [ ln p ( o t ∣ s t ) ] ⎵ reconstruction − E q ( s t − 1 ∣ o ≤ t − 1 , a < t − 1 ) [ K L [ q ( s t ∣ o ≤ t , a < t ) ∥ p ( s t ∣ s t − 1 , a t − 1 ) ] ] ⎵ complexity ) . \ln p\left(o_{1 : T} | a_{1 : T}\right) \triangleq \ln \int \prod_{t} p\left(s_{t} | s_{t-1}, a_{t-1}\right) p\left(o_{t} | s_{t}\right) d s_{1 : T}\geq \sum_{t=1}^{T}\left(\underbrace{\mathrm{E}_{q\left(s_{t} | o _{\leq t}, a_{<t}\right)}\left[\ln p\left(o_{t} | s_{t}\right)\right]}_{\text { reconstruction }} -\underbrace{\mathrm{E}_{q\left(s_{t-1} | o _{\leq t-1}, a_{<t-1}\right)}\left[\mathrm{KL}\left[q\left(s_{t} | o_{ \leq t}, a_{<t}\right) \| p\left(s_{t} | s_{t-1}, a_{t-1}\right)\right]\right]}_{\text { complexity }}\right). lnp(o1:T∣a1:T)≜ln∫∏tp(st∣st−1,at−1)p(ot∣st)ds1:T≥∑t=1T⎝⎜⎛ reconstruction Eq(st∣o≤t,a<t)[lnp(ot∣st)]− complexity Eq(st−1∣o≤t−1,a<t−1)[KL[q(st∣o≤t,a<t)∥p(st∣st−1,at−1)]]⎠⎟⎞.
推导比较简单,包含重要性采样和Jensen不等式的使用两个步骤,包含在附录中,关于变分下界的推导也可参考变分自编码器VAE(Variational Autoencoders)及示例代码。使用重参数化技巧保证了随机梯度下降可以顺利使用。
RSSM
尽管随机模型具有很强的泛化能力,然而,纯粹的随机模型难以记住多个时间步骤所包含的信息。理论上,某些情况下策略方差可以设置为0(确定性策略),然而上述优化过程难以收敛到这类结果。这促使本文引入了一个确定性激活向量序列 { h t } t = 1 T \left\{h_{t}\right\}_{t=1}^{T} {ht}t=1T 允许模型确定地访问所有先前的状态。于是就有了本文所使用的模型 RSSM,如上图c所示。
其中 f ( h t − 1 , s t − 1 , a t − 1 ) f\left(h_{t-1}, s_{t-1}, a_{t-1}\right) f(ht−1,st−1,at−1)是一个RNN。直观地,我们可以理解为该模型将状态划分为一个随即部分 s t s_t st和一个确定状态 h t h_t ht,它们由之前时间步的随即部分和确定部分决定。本文使用编码器 q ( s 1 : T ∣ o 1 : T , a 1 : T ) = ∏ t = 1 T q ( s t ∣ h t , o t ) q\left(s_{1 : T} | o_{1 : T}, a_{1 : T}\right)=\prod_{t=1}^{T} q\left(s_{t} | h_{t}, o_{t}\right) q(s1:T∣o1:T,a1:T)=∏t=1Tq(st∣ht,ot)来参数化近似状态后验。
Latent Overshooting
Motivation
在上一部分,本文建立了在隐序列空间进行学习和推断的标准变分下界,包含一个针对观测的重构项和一个针对近似后验的KL散度正则项。这个变分推断目标的一个缺陷是:转移概率函数 p ( s t ∣ s t − 1 , a t − 1 ) p\left(s_{t} | s_{t-1}, a_{t-1}\right) p(st∣st−1,at−1)的随机部分仅被KL正则中的单步预测所训练,梯度经过 p ( s t ∣ s t − 1 , a t − 1 ) p\left(s_{t} | s_{t-1}, a_{t-1}\right) p(st∣st−1,at−1)后直接进入 q ( s t − 1 ) q(s_{t-1}) q(st−1),而不进入 p ( s t − 1 ∣ s t − 2 , a t − 2 ) p\left(s_{t-1} | s_{t-2}, a_{t-2}\right) p(st−1∣st−2,at−2)从而遍历多个 p ( s t i ) p(s_{t_i}) p(sti). 在这一部分,我们将标准变分下界推广到 latent overshooting,可在潜空间训练所有的多步预测。
事实上,如果模型能够做完美的单步预测,那么它也能做出完美的多步预测。然而,通常使用的模型都容量有限并且限制在确定的分布族上,将模型单步训练至收敛,与多步预测所需的最佳模型并不一致。成功规划需要精确的多步预测,并在所有的多步预测数据上训练模型。本文把这一想法推广到潜序列模型,表明多步预测也可以被潜空间上的loss来优化,而不需要添加额外的图像。
固定距离 d d d的多步预测
我们开始把上面训练单步预测的标准变分下界推广到固定距离 d d d的多步预测情形。为省略起见,省略了 s t s_t st关于 a t a_t at的先验。则:
p ( s t ∣ s t − d ) ≜ ∫ ∏ τ = t − d + 1 t p ( s τ ∣ s τ − 1 ) d s t − d + 1 : t − 1 = E p ( s t − 1 ∣ s t − d ) [ p ( s t ∣ s t − 1 ) ] \begin{aligned} p\left(s_{t} | s_{t-d}\right) & \triangleq \int \prod_{\tau=t-d+1}^{t} p\left(s_{\tau} | s_{\tau-1}\right) d s_{t-d+1 : t-1} \\ &=\mathrm{E}_{p\left(s_{t-1} | s_{t-d}\right)}\left[p\left(s_{t} | s_{t-1}\right)\right] \end{aligned} p(st∣st−d)≜∫τ=t−d+1∏tp(sτ∣sτ−1)dst−d+1:t−1=Ep(st−1∣st−d)[p(st∣st−1)]
于是,关于多步预测分布 p d p_{d} pd 的变分下界为:
ln p d ( o 1 : T ) ≜ ln ∫ ∏ t = 1 T p ( s t ∣ s t − d ) p ( o t ∣ s t ) d s 1 : T ≥ ∑ t = 1 T ( E q ( s t ∣ o ≤ t ) [ ln p ( o t ∣ s t ) ] ⎵ reconstruction − E p ( s t − 1 ∣ s t − d ) q ( s t − d ∣ o ≤ t − d ) [ K L [ q ( s t ∣ o ≤ t ) ∥ p ( s t ∣ s t − 1 ) ] ] ⎵ multi-step prediction ) \ln p_{d}\left(o_{1 : T}\right) \triangleq \ln \int \prod_{t=1}^{T} p\left(s_{t} | s_{t-d}\right) p\left(o_{t} | s_{t}\right) d s_{1 : T}\geq \sum_{t=1}^{T}\left(\underbrace{\mathrm{E}_{q\left(s_{t} | o _{\leq t}\right)}\left[\ln p\left(o_{t} | s_{t}\right)\right]}_{\text { reconstruction }}-\underbrace{\mathrm{E}_{p\left(s_{t-1} | s_{t-d}\right) q\left(s_{t-d} | o_{ \leq t-d}\right)}\left[\mathrm{KL}\left[q\left(s_{t} | o_{ \leq t}\right) \| p\left(s_{t} | s_{t-1}\right)\right]\right]}_{\text { multi-step prediction }}\right) lnpd(o1:T)≜ln∫∏t=1Tp(st∣st−d)p(ot∣st)ds1:T≥∑t=1T⎝⎜⎛ reconstruction Eq(st∣o≤t)[lnp(ot∣st)]− multi-step prediction Ep(st−1∣st−d)q(st−d∣o≤t−d)[KL[q(st∣o≤t)∥p(st∣st−1)]]⎠⎟⎞
推导和上一部分类似,最大化这一目标就能使多步预测的准确性得到训练。这一反应了在多步预测中,模型无需访问先前的所有观测,仅在潜空间就可进行预测。
Latent overshooting:可变距离多步预测
Latent overshooting就是再把多步预测变分下界从固定 d d d步推广到 1 ≤ d ≤ D 1\le d \le D 1≤d≤D:
1 D ∑ d = 1 D ln p d ( o 1 : T ) ≥ ∑ t = 1 T ( E q ( s t ∣ o ≤ t ) [ ln p ( o t ∣ s t ) ] ⎵ reconstruction − 1 D ∑ d = 1 D β d E p ( s t − 1 ∣ s t − d ) q ( s t − d ∣ o ≤ t − d ) [ K L [ q ( s t ∣ o ≤ t ) ∥ p ( s t ∣ s t − 1 ) ] ] ⎵ latent overshooting ) \frac{1}{D} \sum_{d=1}^{D} \ln p_{d}\left(o_{1 : T}\right) \geq \sum_{t=1}^{T}\left(\underbrace{\mathrm{E}_{q\left(s_t | o _{\leq t}\right)}\left[\ln p\left(o_{t} | s_{t}\right)\right]}_{\text { reconstruction }}-\underbrace{\frac{1}{D} \sum_{d=1}^{D}\beta_d\mathrm{E}_{p\left(s_{t-1} | s_{t-d}\right) q\left(s_{t-d} | o_{ \leq t-d}\right)}\left[\mathrm{KL}\left[q\left(s_{t} | o_{ \leq t}\right) \| p\left(s_{t} | s_{t-1}\right)\right]\right]}_{\text { latent overshooting }}\right) D1∑d=1Dlnpd(o1:T)≥∑t=1T⎝⎜⎜⎜⎜⎛ reconstruction Eq(st∣o≤t)[lnp(ot∣st)]− latent overshooting D1d=1∑DβdEp(st−1∣st−d)q(st−d∣o≤t−d)[KL[q(st∣o≤t)∥p(st∣st−1)]]⎠⎟⎟⎟⎟⎞
Latent overshooting 可以被看作潜空间的正则项,鼓励单步和多步预测之间的一致性,因为这两者在数据集上的期望应该是相等的。同时引入了权重因子 { β d } d = 1 D \{\beta_d\}^D_{d=1} {βd}d=1D,可以被调整来决定是更多关注短期预测还是长期预测。
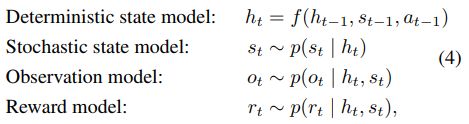
对比
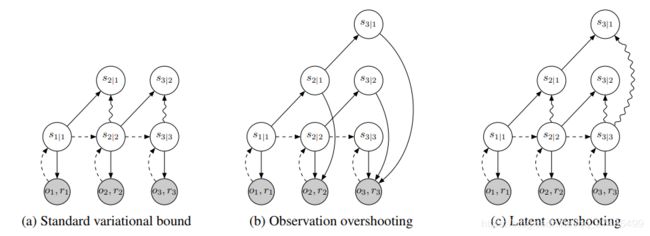
如上图所示,a为标准变分下界,包含下方的重构loss,和上方单步预测的KL正则;b为观测overshooting,将潜空间展开预测多步重构loss,但是在图像领域计算代价过于昂贵;c可以看作以上两者的结合和扩展。
从附录结果看,latent overshooting 对于 RSSM 提升不显著,对于确定性模型可能意义更大。
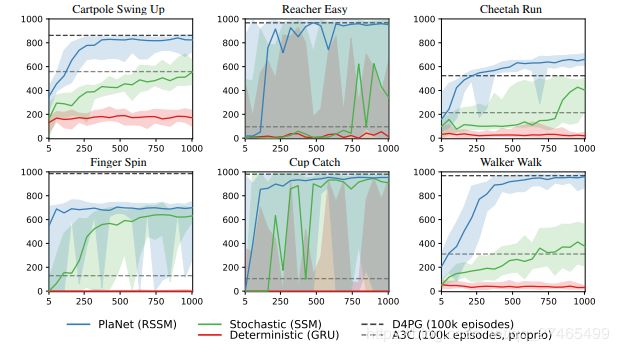
实验